International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 3 Issue: 4
SSN: 2321-8169
2343 2348
_______________________________________________________________________________________________
Prototype Implementation of Real Time CAN Driver for Distributed Embedded
Applications
Kuldipsing Rajput1
M.Tech in Embedded System Technologies
Vel Tech University, Chennai, India
& CDAC ACTS, Pune, India
rajputkuldipsing@gmail.com
Babu Krishnamurthy2
Senior Technical officer
R & D Dept. CDAC ACTS,
Pune, India
babu_krishnamurthy@yahoo.com
Sasikala G.3
Associate Professor
Vel Tech Technical University,
Chennai, India
gsasikala@veltechuniv.edu.in
Abstract- The purpose of this proposed prototype is to make it useful in various distributed embedded applications. This system is implemented
by using FreeRTOS, LPC1769, CAN (Controller Area Network), LwIP (Light Weight Internet Protocol) Protocol and Sensors. Now a days real
time communication is one of the key features in distributed embedded systems. Using FreeRTOS, distributed embedded application
performance will be improved as compared to general operating system. FreeRTOS comprises CAN & LwIP protocol stack which transfer real
time data from one microcontroller node to another. The Sensor acts as input to this prototype and microcontroller node in compliance of
FreeRTOS that comprises the Real Time CAN driver which is used for secured data transfer. Real Time LwIP protocol stack is implemented on
top of FreeRTOS to feed the data to PC Host application. It consumes less RAM as compared to other communication protocols such as TCP,
UDP, etc. for data transmission so that the memory bandwidth is reduced. In this system, based on LwIP stack the data will be transferred from
microcontroller Node to the Host application. PC Host application is used for data monitoring and control. Data acquisition and control of
distributed embedded applications will be improved with help of this designed prototype.
Keywords- Distributed Embedded System, FreeRTOS, CAN, LwIP.
__________________________________________________*****_________________________________________________
I.
INTRODUCTION
Distributed embedded system defines that multiple
systems are interconnected by a network to achieve some
specific goal. It is composed of firmware, microcontroller
nodes, devices, and networks. Various nodes are connected to
each other through interconnects. Distributed embedded
system deals with the parameters such as performance,
throughput, minimal latencies, compatibility, etc. When
compared with the centralized system the distributed system
gives more reliable throughput and performance. However the
FreeRTOS is being ported on several multicore architectures
so that it provides task execution simultaneously on the
available cores on basis of its own task scheduling policies
[11].
In this prototype we describe a usage of FreeRTOS for
the development of multiple microcontroller node
communication. It is hard real time operating system.
FreeRTOS is mostly used for embedded application
development. It is modularly designed, with a portable layer
written in C, and a port specific layer for each compilerprocessor pair written mostly in assembly language.
In proposed prototype the communication protocols CAN
& LwIP plays vital role for data transmission from distributed
nodes. CAN protocol is widely used in distributed embedded
application development. It provides a reliable, high speed,
event-triggered communication, simple and low cost
utilization. It is used in mostly Automotive Industries to
interconnect many Electronic Control Units (ECU) that
exchange information through the CAN bus. Real time CAN
protocol will improve the responsiveness and throughput [1].
LwIP protocol is free lightweight TCP/IP stack which
retains main function of TCP/IP with reduction of RAM size.
It supports IPV4, IPV6, TCP, UDP, ICMP, IGMP, SNMP,
ARP and PPP protocols thus, it provide wide range of
networking application support [14]. At Network application
layer it supports DHCP and HTTP protocols for PC Host
application development.
The paper presents prototype implementation for various
distributed embedded applications such as Parking Guidance
System, Elevator Control System, and Industrial Control
System. In this implementation sensors used as input to Real
Time CAN microcontroller Node. The sensors would be the
replaced as per the requirement of the application. The
Microcontroller Node comprises of CORTEX M3 LPC1769
microcontroller in compliance of FreeRTOS. The data from
the sensor is stored in the CAN protocol data frame. Real
Time data is then transmitted from one Node to other through
CAN bus. Real Time LwIP stack is implemented on the
FreeRTOS environment to give reliable speed and higher
throughput. This communication protocol used to transfer data
from the Microcontroller Node to the PC Host application. It
provides the data to PC Host application with real time
constraints. PC Host application will then able to provide real
time information on the display. Data monitoring and control
of this application will be done at PC Host application level
with the help of physical interface.
The paper is organized as follow: in section II, prototype
design components which includes RTOS framework, CAN
and LwIP protocol implementation and their work is
discussed; in section III, real time distributed embedded
applications and their implementation possibilities is
discussed; in section IV, real time distributed parking guidance
system application is described; section V, concluding remarks
are given.
II. PROTOTYPE DESIGN COMPONENTS
A. FreeRTOS + IO FrameworkMost of the embedded application uses FreeRTOS which
provides the core real time scheduling polices (Preemptive,
Co-operative and Dynamic), inter-task communication, timing
2343
IJRITCC | April 2015, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 3 Issue: 4
SSN: 2321-8169
2343 2348
_______________________________________________________________________________________________
and synchronization primitives. Additional functionality such
as a command console interface, or networking stacks, can be
then be included with add-on components.[11].
FreeRTOS Task xTaskCreate API is used to create Real
Time Task at application layer. It has various parameters such
as its own task function, name, task stack size which is
generally allocated from heap, task priority, and the task
parameter. In FreeRTOS task execution is done with the
control of Scheduler thus, the task which is of higher priority
will execute first and then lower priority task executes [9].
FreeRTOS+IO framework provides a Linux/POSIX like
open(), read(), write(), ioctl() type interface peripheral driver
libraries. This framework resides in between the Peripheral
driver library and user application layer. It provides a single,
common, interface to all supported peripherals. It provides
interface to various peripherals such as UART, I2C, SPI,
CAN, etc. Also various different data transfer modes are
created for read and write the data. It is implemented as a set
of Application Program Interface (API) functions written in C
[11]. FreeRTOS+IO framework provides the interface between
the CMSIS (Cortex Microcontroller Software Interface
Standard), FreeRTOS Libraries and certain application
specific libraries. It includes the board specific files to develop
the board specific firmware code. Board Support Package
(BSP) consisting available peripherals on the hardware and
among them the required peripheral is invoked in the driver
layer with the help of FreeRTOS_ioctl() function call.
Configuration file provides the facility to add or remove the
certain parameters. It provides various data transfer modes
such as polled transfer mode, interrupt driven zero copy
transfer mode, circular buffer transfer mode, etc. so that
according to the application requirement the mode has been
selected. This framework also takes care of the peripheral
specific parameters such as data frame type, message id, data
frame length, etc with FreeRTOS_ioctl() function call.
B. CAN Driver ImplementationFreeRTOS+IO framework is used to implement Real Time
CAN driver on the FreeRTOS environment. The framework
provides the API where controller supported peripherals is
defined. The proposed prototype is implemented on the
LPC1769 CORTEX M3 microcontroller which has two CAN
peripherals as CAN1 & CAN2. Both are registered in the BSP
file. The framework will then able to register the Real Time
CAN driver. Application layer includes the user level program
which calls the CAN driver APIs to perform various data
transfer operations through the Real Time CAN driver [1].
Before execution of Real Time CAN driver activities like
open, read, write, ioctl framework calls the function
taskENTER_CRITICAL() which is used to disable the
external interrupts with the help of basepri register of
CORTEX M3 microcontroller. After completion of driver
activities the interrupts are enabled again with the function call
taskEXIT_CRITICAL().
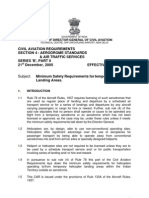
Fig. 1 shows the FreeRTOS+IO framework for Real Time
CAN driver. Figure consists of various library file and the
layer are interconnected to each other with the help of
FreeRTOS generic APIs.
Fig.1 FreeRTOS+IO CAN driver Framework [11]
The functionality of generic system calls is as explained
below1) FreeRTOS_CAN_open()This API will take control over HAL (Hardware
Abstraction Layer) where the CAN initialization and pin
configuration is done at the given base address as per the
requirement. Baud rate settings are done in the same layer.
This protocol is specified in the BSP (Board Support
Package). addition, peripheral-specific read(), write() and
ioctl() functions are assigned to the peripheral control
structure.
2) FreeRTOS_CAN_ioctl()CAN is serial communication protocol provides the
standard and extended data frame, the data in this protocol
is transmitted in the form of message which is composed
of following fields: Start-of-frame (SOF), arbitration,
control, data, cyclic redundancy check (CRC),
Acknowledgement (ACK) and end-of-frame (EOF). Thus,
these fields are specified during the message transmission
from one node to other. This API is designed in such a
way that it provides user to select the parameters of data
frame as per the requirement of the application.
3) FreeRTOS_CAN_write()This API provide data buffer to send data from user layer
to the Hardware layer. Here user defines the data at
application layer and pointer to the data is then passed to
this API as one of its parameter as pointer to the buffer.
Then the as per the selection of CAN peripheral base
address a specific CAN peripheral is selected among the
present ones. Then after Hardware specific registers
which are defined for the data transmission are accessed.
The data from application layer is loaded in TFI (Transmit
Frame Information Register), TID (Transmit Identifier),
TDA (Transmit Data from byte 1-4); TDB (Transmit Data
from byte 5-8) registers.
2344
IJRITCC | April 2015, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 3 Issue: 4
SSN: 2321-8169
2343 2348
_______________________________________________________________________________________________
4) FreeRTOS_CAN_read()Priority based messages are transmitted through the
CAN bus. The data from the bus is received with this
function call. In this function call semaphore
mechanism is called for synchronization. As taking
and giving semaphores are atomic operations since
interrupts are disabled and the scheduler is suspended
in order to obtain a lock on the data buffer. The
specified buffer is able to read data from the CAN
register which is defined at the HAL. The data
received from RFS (Receive Frame Status Register),
RID (Receive Identifier), RDA (Receive Data
Register-A), RDB (Receive Data Register-B).
C. LwIP Stack ImplementationLwIP protocol is free lightweight TCP/IP
stack developed by Adam Dunkels at the Swedish
institute of computer science (SISC) [14]. It retains
main function of TCP/IP with reduction of RAM size.
It only needs several hundred bytes of RAM and about
40Kbyytes of ROM to run efficiently, which makes it
very suitable protocol for distributed embedded
applications [3]. LwIP uses a process model in which
all protocols reside in a single process and are thus
separated from the operating system kernel. LwIP does
not provide any port to any microcontroller so we are
implementing it on the CORTEX M3 LPC1769
controller.
LwIP consists following modules1) Operating system emulation layer- To make
LwIP portable an operating system emulation
layer provides a uniform interface to operating
system services such as timers, process
synchronization,
and
message
passing
mechanisms. Also it provides the timer
functionality that is used by TCP [14].
2) Buffer and memory management subsystemsBuffer and memory management system is same
as TCP/IP segment. In this stack implantation the
pbuf is an internal representation of a packet.
The pbuf has support of both dynamic and
static memory allocation. It consists of three
types as PBUF_RAM, PBUF_ROM and
PBUF_POOL. These buffers are managed by
pbuf subsystems [14].
3) Network Interface- Device drivers for physical
network hardware are represented by a network
interface structure. This structure consisting of
various fields such as pointer to next node,
Name, IP Address, Netmask, Gateway IP
Address, etc [14].
4) Application Program Interface- For LwIP stack
implementation LwIP API was designed. These
API are similar to BSD (Berkeley Software
Distribution) Socket API. LwIP API does not
require any additional copy operation from the
application program to TCP/IP stack. This would
waste both processing time and memory. Thus
the LwIP API allows the application program to
manipulate data directly in the partitioned buffers
in order to avoid the extra copy.
LwIP divides the task into two different processes
as shown in the fig. 2. TCP/IP stack related API is
communicating with Application process by Inter
Process Communication mechanism such as Shared
memory, Message Passing and Semaphore [14].
Fig.2 Division of API Implementation [14]
Fig No-02 shows the LwIP stack implementation is
done on the LPC1769 microcontroller with compliance of
FreeRTOS.
Fig. 3 LwIP Protocol stack layer
In the networking layer of LwIP protocol network
devices and the respective drivers are interfaced through the
system calls. Data is transmitted in the form of packets streams
like TCP/IP packets. Network devices such as Ethernet hub,
Switch, Routers are interfaced with various development
boards with the help of network device drivers. The data from
the network devices is fed to the Server. Server is the used to
store data from various distributed nodes in the distributed
embedded applications. The server is centralized for the
specific distributed embedded application so that any node in
the network can access it. The data packets are given to client
as per its request. Network application layer contains the web
based user application designed based on DHCP (Dynamic
Host Configuration Protocol), HTTP (Hyper Text Transfer
Protocol).
2345
IJRITCC | April 2015, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 3 Issue: 4
SSN: 2321-8169
2343 2348
_______________________________________________________________________________________________
III.
DISTRIBUTED EMBEDDED APPLICATIONS
Proposed prototype is designed for the development
of distributed embedded applications. Some of these are as
belowA. Industrial Control SystemIn the industries temperature control, air pressure
control, smoke detection is most critical tasks to be
controlled in the industrial environment. So the
respective sensors are interfaced with the proposed
designed prototype. Thus these sensors will give the
parameter values to be controlled and the
microcontroller node will then transmit information
from node to PC Host application through LwIP stack
for real time data monitoring and control [4].
B. Elevator Control SystemElevator control system is distributed control system
consists various sensors, switches, and peripherals
like FAN, LED Display, Alarm, etc. Thus to get real
time control over these peripherals and the most
critical task that is door open and close operations can
be easily handled by this real time distributed
prototype. Only we need to change interconnects to
the designed prototype and we will get the control
over the elevator system. Also according to the
application the respective changes made in the PC
Host application [10].
C. Distributed system for Airport terminalsAt Airport Terminal the Flight information display
board shows the real time information with the time
factor. Also various lightening systems and LED
indicators can be interfaced with the proposed
prototype microcontroller node. Sensors at the airport
terminal will gives the input in the form of the
surrounding temperature, smoke, humidity and many
other parameters. The sensor information is displayed
on the PC host application which is fixed at control
room. Also to display the flight status at display these
Real Time communication protocol will give higher
responsiveness and throughput.
D. Parking Guidance SystemParking guidance system is the best real time
distributed embedded application which can be
developed by using this proposed prototype [10]. This
proposed system is further described in next section.
IV.
The allocation of this parking lot is done by the
parking management and control system. Slave Node A & B
are connected to the Master Node via CAN Bus. In this
prototype each Slave Node has three sensors to sense the car
object. Sensor data will be send to the Master Node via CAN
Bus through the Slave Node. Each Node in the system is in
compliance of FreeRTOS environment.
Master node will then collect the data from the slave
through the CAN bus. At the Master Node the CAN-LwIP
Gateway is established. Then the data from CAN node to the
Host PC application is transmitted through the LwIP stack.
LwIP stack implementation is done at the Master Node. The
Master Node will be then connected to the Host PC though the
RJ45 Ethernet cable. As LwIP has support of TCP/IP standard
protocol so it can transmit data from the Master to the Host PC
[2].
At the Host side a Real time monitoring application will be
designed with the HTML web development scripting language
on the basis of HTTP or DHCP protocol [2, 4]. This real time
distributed application will give information details of the
parking area such as the allocated parking lot, free parking lot.
This application also provides the control over the whole
parking area with the help of control panel. Master Node is
also interfaced with the Display unit for an indication of the
available parking lot. The display unit will be situated at the
parking entrance to guide the car driver. The display unit will
show the real time information on it. Along with the sensor
Led will be interfaced for an indication of allocated and free
parking space.
SYSTEM DESIGN IMPLEMENTATION
The proposed system will consists of two nodes
Master and Slave respectively. Fig. 4 describes the prototype
implementation of the parking guidance system. In this system
design an Ultrasonic Sensor (HCSR-04) will be interfaced
with the Slave node through the GPIO (General Purpose Input
Output) inbuilt protocol of the microcontroller. Here the
sensor is used to sense the presence of the vehicle in the
parking lot. In this prototype CAR A, B, C, D are the parking
lot. This prototype also provides the facility to allocate the
parking lot for VIP (Very Important) person which is indicated
in the red color at the CAR A place as shown in Fig 4.
Fig. 4 System Implementation Prototype
Fig. 5 shows the programming flow chart of the proposed
system design. The task implementation and its execution will
be done based on the designed flow chart. The prototype
firmware implemented by using the Real Time task for each
protocol specific operations.
2346
IJRITCC | April 2015, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 3 Issue: 4
SSN: 2321-8169
2343 2348
_______________________________________________________________________________________________
V.
IMPLEMENTATION RESULTS
Proposed prototype is implemented on the Hardware
base board LPCXpresso Base Board provided by Embedded
Artists [13]. Also the main target stamp of ARM CORTEX
M3 LPC1769 is provided along with the base board [13].
FreeRTOS porting become an easy task because of the
extraordinary efforts of the LPCXpresso team [12]. The
Proposed system implementation is based on the
FreeRTOS+IO framework [11]. Hardware details are shown
in below figure.
Fig.6 Master-Slave Communication
Fig. 5 Program Flow Chart
Three real time tasks are created to complete the prototype
objective. These tasks are as belowA. GPIOSensorTaskThis task configures the GPIO pins as input for sensor
module interfacing and output for the sensor status
indication. FIOPIN register is used to get the current
status of the sensor interfaced port pin. The value of this
register is then stored in the pointer variable and then
passed to the FreeRTOS_Queue buffer. Then through the
queue mechanism the GPIO port pin status send to
CANWriteTask.
B. CANWriteTaskIn this Task the GPIO port pin status is received through
the Queue receive buffer. This task specifies the CAN
data Frame details such as Frame ID, Frame Length, and
Data Frame Payload. Then with the help of
FreeRTOS_CAN_ioctl() system call the respective
registers are configured at HAL(Hardware Abstraction
Layer) of the Framework. The FreeRTOS_CAN_wrtie()
API is then used to send the data over CAN bus. At the
Master node FreeRTOS_CAN_read() API is used to read
the data from the CAN bus.
C. LwIPServerTaskThis Task is used to implement Real Time LwIP stack for
data transmission from Master Node to the PC Host
application. The data packets are same as the TCP/IP
packets. IP address is assigned to the Base Board which
acts as server or client and the PC Host acts as server. The
LwIP API is responsible for data packet transmission.
Thus, the Real Time CAN data is posted over Host
application.
Figure 6 shows the communication between two
nodes through CAN Bus. Slave node send the data through the
TDA and TDB register of CAN protocol, at the Master side
the data is received at RDA and RDB register. The console
window is very useful feature to see the simulation results of
the experiments on the LPCXpresso Kit. Thus the data in
master and slave node can be seen through the console
window as shown in below Fig. 7
Fig. 7 Output Console view
Here we have assigned the Frame length of 6 byte out of
8 byte so the TDA register has first 4 bytes and TDB register
contains the remaining 2 bytes. At the Receiver side which is
Master Node gets the same data in TDA and TDB registers.
Thus the CAN protocol can send the real time data on
FreeRTOS environment without any data frame loss.
2347
IJRITCC | April 2015, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 3 Issue: 4
SSN: 2321-8169
2343 2348
_______________________________________________________________________________________________
Also the LwIP stack implementation and the
communication between the Master Node and the Host PC
Application implemented on the same hardware. The sample
data packets are sent from the Master Node to the Host PC
through the RJ45 Ethernet Cable. Below figure shows the
packet transmission [2]. Here the LwIP protocol creates its
own IP address and then it provide the IP address to the Host
PC for communication [2, 3]. The pinging operation results
are as shown in below figure.
Fig. 8 Pinging Operation
VI. CONCLUSION & FUTURE WORK
This prototype has been designed and implemented to
improve the performance of CAN and LwIP protocol based
Distributed Embedded Applications. In comparison with other
distributed embedded prototype, the proposed prototype is
efficient and has higher throughput. The distributed embedded
application involves parking guidance system which is
designed on this prototype. This Prototype can also be
mounted at various places such as Shopping Mall, Multiplex,
and Function Hall. Due to lack of management in parking
space driver finds difficulty to park the car and waste lot of
time for car parking which results in the Traffic congestion,
fuel Consumption, Air pollution etc. So to avoid these
problems, this prototype is the best solution. This prototype
provides flexibility in addition of sensor nodes in the existing
prototype. The multitasking functionality of the system will be
handled by the FreeRTOS APIs which gives dedicated
responsiveness.
Future work would provide security and parking
billing system development. In this implementation, camera
would be interfaced with the existing system which can
capture the number plate of the car entering the parking lot and
parking bill will be generated at the entrance. The security
system will be monitored the whole parking lot with the help
of interfaced cameras. The PC Host application can be
designed more dynamically by using .Net and PHP
framework.
ACKNOWLEDGEMENT
The author wishes to thanks to Prof. Rajesh Sola and
Mrs. Vaishali Maheshkar for giving valuable suggestions and
mentoring me in doing this work.
REFERENCES
[1] Florin Catalin Braescu, Lavinia Ferariu and Andrei
Franciuc,Monitoring CAN Performances in Distributed
Embedded Systems, IEEE System Theory, Control, and
Computing (ICSTCC), 15th International Conference, 2011.
[2] Wei Chen, Shu-Bo-Qiu, Ying-Chun Zhang The Porting and
Implementation of Light-Weight TCP/IP for Embedded Web
Sever, IEEE Wireless Communication, Networking and Mobile
Computing (WiCOM), 4TH International Conference, 2008.
[3] Zoican, S. Telecomm. Dept., Politeh. Univ. of Bucharest,
Bucharest, Romania, LwIP Stack Protocol for Embedded
Sensor Network IEEE 9TH International Conference on
Communications (COMM), 2012.
[4] BoQu & Daowei Fan, Design of remote data monitoring and
recording system Based on ARM, IEEE 2nd International
Conference on Industrial and Information Systems, 2010.
[5] Yanfeng Geng, Christos G. Cassandras, New Smart Parking
System Based on Resource Allocation and Reservation IEEE
transaction on Intelligent Transportation System Vol no.3, Sept.
2013.
[6] Ran XueJun1,Wang Jianqun1,Li Zhenshan1,Yao Guozhong1
Design of Parking Guidance System based on Embedded
Internet Access Technology, IEEE, Control and Decision
Conference, 2010.
[7] Sanaa Alfatihi, Soukaina Chihab and Yassine Salih Alj
Intelligent Parking System for Car Parking Guidance and
Damage Notification, IEEE 4TH International Conference on
Intelligent Systems, Modeling and Simulation, 2013.
[8] R. Bosch, GmbH, CAN Specification 2.0, Robert Bosch
GmbH, 1991.
[9] R. Barry, Using the FreeRTOS Real Time Kernel, 1st ed., 2010.
[10] CAN In Automation (CiA) CAN Newsletter [Online].
Available: http://www.can-newsletter.org/engineering/
[11] FreeRTOS
homepage.
[Online].
Available:
http://www.freertos.org/
[12] LPCXPRESSO IDE (Integrated Development
Tool)
[Online]. Available: http://www.lpcware.com/lpcxpresso.
[13] Embeddedartists.com, 'LPC1769 LPCXpresso Board |
Embedded Artists AB', 2015. [Online]. Available:
http://www.embeddedartists.com/products/lpcxpresso/lpc1769_
xpr.php.
[14] Adam Dunkels Design and Implementation of the LwIP
TCP/IP Stack Ph.D. Thesis, Swedish Institute of Computer
Science (SICS), Feb-2000-2001.
2348
IJRITCC | April 2015, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
Das könnte Ihnen auch gefallen
- A Review of Wearable Antenna For Body Area Network ApplicationDokument4 SeitenA Review of Wearable Antenna For Body Area Network ApplicationEditor IJRITCCNoch keine Bewertungen
- Channel Estimation Techniques Over MIMO-OFDM SystemDokument4 SeitenChannel Estimation Techniques Over MIMO-OFDM SystemEditor IJRITCCNoch keine Bewertungen
- Regression Based Comparative Study For Continuous BP Measurement Using Pulse Transit TimeDokument7 SeitenRegression Based Comparative Study For Continuous BP Measurement Using Pulse Transit TimeEditor IJRITCCNoch keine Bewertungen
- Channel Estimation Techniques Over MIMO-OFDM SystemDokument4 SeitenChannel Estimation Techniques Over MIMO-OFDM SystemEditor IJRITCCNoch keine Bewertungen
- Performance Analysis of Image Restoration Techniques at Different NoisesDokument4 SeitenPerformance Analysis of Image Restoration Techniques at Different NoisesEditor IJRITCCNoch keine Bewertungen
- IJRITCC Call For Papers (October 2016 Issue) Citation in Google Scholar Impact Factor 5.837 DOI (CrossRef USA) For Each Paper, IC Value 5.075Dokument3 SeitenIJRITCC Call For Papers (October 2016 Issue) Citation in Google Scholar Impact Factor 5.837 DOI (CrossRef USA) For Each Paper, IC Value 5.075Editor IJRITCCNoch keine Bewertungen
- A Review of 2D &3D Image Steganography TechniquesDokument5 SeitenA Review of 2D &3D Image Steganography TechniquesEditor IJRITCCNoch keine Bewertungen
- Comparative Analysis of Hybrid Algorithms in Information HidingDokument5 SeitenComparative Analysis of Hybrid Algorithms in Information HidingEditor IJRITCCNoch keine Bewertungen
- Fuzzy Logic A Soft Computing Approach For E-Learning: A Qualitative ReviewDokument4 SeitenFuzzy Logic A Soft Computing Approach For E-Learning: A Qualitative ReviewEditor IJRITCCNoch keine Bewertungen
- Diagnosis and Prognosis of Breast Cancer Using Multi Classification AlgorithmDokument5 SeitenDiagnosis and Prognosis of Breast Cancer Using Multi Classification AlgorithmEditor IJRITCCNoch keine Bewertungen
- A Review of 2D &3D Image Steganography TechniquesDokument5 SeitenA Review of 2D &3D Image Steganography TechniquesEditor IJRITCCNoch keine Bewertungen
- Modeling Heterogeneous Vehicle Routing Problem With Strict Time ScheduleDokument4 SeitenModeling Heterogeneous Vehicle Routing Problem With Strict Time ScheduleEditor IJRITCCNoch keine Bewertungen
- A Review of Wearable Antenna For Body Area Network ApplicationDokument4 SeitenA Review of Wearable Antenna For Body Area Network ApplicationEditor IJRITCCNoch keine Bewertungen
- Importance of Similarity Measures in Effective Web Information RetrievalDokument5 SeitenImportance of Similarity Measures in Effective Web Information RetrievalEditor IJRITCCNoch keine Bewertungen
- Network Approach Based Hindi Numeral RecognitionDokument4 SeitenNetwork Approach Based Hindi Numeral RecognitionEditor IJRITCCNoch keine Bewertungen
- Efficient Techniques For Image CompressionDokument4 SeitenEfficient Techniques For Image CompressionEditor IJRITCCNoch keine Bewertungen
- Safeguarding Data Privacy by Placing Multi-Level Access RestrictionsDokument3 SeitenSafeguarding Data Privacy by Placing Multi-Level Access Restrictionsrahul sharmaNoch keine Bewertungen
- A Clustering and Associativity Analysis Based Probabilistic Method For Web Page PredictionDokument5 SeitenA Clustering and Associativity Analysis Based Probabilistic Method For Web Page Predictionrahul sharmaNoch keine Bewertungen
- Prediction of Crop Yield Using LS-SVMDokument3 SeitenPrediction of Crop Yield Using LS-SVMEditor IJRITCCNoch keine Bewertungen
- Predictive Analysis For Diabetes Using Tableau: Dhanamma Jagli Siddhanth KotianDokument3 SeitenPredictive Analysis For Diabetes Using Tableau: Dhanamma Jagli Siddhanth Kotianrahul sharmaNoch keine Bewertungen
- A Content Based Region Separation and Analysis Approach For Sar Image ClassificationDokument7 SeitenA Content Based Region Separation and Analysis Approach For Sar Image Classificationrahul sharmaNoch keine Bewertungen
- Itimer: Count On Your TimeDokument4 SeitenItimer: Count On Your Timerahul sharmaNoch keine Bewertungen
- Hybrid Algorithm For Enhanced Watermark Security With Robust DetectionDokument5 SeitenHybrid Algorithm For Enhanced Watermark Security With Robust Detectionrahul sharmaNoch keine Bewertungen
- A Study of Focused Web Crawling TechniquesDokument4 SeitenA Study of Focused Web Crawling TechniquesEditor IJRITCCNoch keine Bewertungen
- 45 1530697786 - 04-07-2018 PDFDokument5 Seiten45 1530697786 - 04-07-2018 PDFrahul sharmaNoch keine Bewertungen
- 44 1530697679 - 04-07-2018 PDFDokument3 Seiten44 1530697679 - 04-07-2018 PDFrahul sharmaNoch keine Bewertungen
- Image Restoration Techniques Using Fusion To Remove Motion BlurDokument5 SeitenImage Restoration Techniques Using Fusion To Remove Motion Blurrahul sharmaNoch keine Bewertungen
- Space Complexity Analysis of Rsa and Ecc Based Security Algorithms in Cloud DataDokument12 SeitenSpace Complexity Analysis of Rsa and Ecc Based Security Algorithms in Cloud Datarahul sharmaNoch keine Bewertungen
- Vehicular Ad-Hoc Network, Its Security and Issues: A ReviewDokument4 SeitenVehicular Ad-Hoc Network, Its Security and Issues: A Reviewrahul sharmaNoch keine Bewertungen
- 41 1530347319 - 30-06-2018 PDFDokument9 Seiten41 1530347319 - 30-06-2018 PDFrahul sharmaNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Multi-Hazard Risk and Asset Value Assessment of Heritage Buildings (Case Study in Iloilo City, Philippines)Dokument11 SeitenMulti-Hazard Risk and Asset Value Assessment of Heritage Buildings (Case Study in Iloilo City, Philippines)andyoreta6332Noch keine Bewertungen
- Buss AG PDFDokument33 SeitenBuss AG PDFchinmoyd1Noch keine Bewertungen
- Geology From 1991Dokument45 SeitenGeology From 1991api-3740563Noch keine Bewertungen
- Linux CommandsDokument6 SeitenLinux CommandsYellankiNoch keine Bewertungen
- Pig Iron Production GuideDokument120 SeitenPig Iron Production Guidesaurabh100% (1)
- Xi31 FP42 Release Notes enDokument133 SeitenXi31 FP42 Release Notes enJuliana SanadaNoch keine Bewertungen
- F1267-12 Standard Specification For Metal, Expanded, SteelDokument8 SeitenF1267-12 Standard Specification For Metal, Expanded, Steeltjt4779100% (2)
- Sms Country HTTP APIDokument7 SeitenSms Country HTTP APIsirajsaNoch keine Bewertungen
- Army Doc For SheldonDokument39 SeitenArmy Doc For SheldonPat Rock67% (3)
- Alkaline Activation of Synthetic Gehlenite Glasses: by J. DejaDokument14 SeitenAlkaline Activation of Synthetic Gehlenite Glasses: by J. DejaomarnajimNoch keine Bewertungen
- Chapter4 Part2Dokument18 SeitenChapter4 Part2SamanAtrian0% (1)
- Civil Aviation Requirements Section 4 - Aerodrome Standards & Air Traffic Services Series 'B', Part Ii 21 December, 2005 Effective: ForthwithDokument7 SeitenCivil Aviation Requirements Section 4 - Aerodrome Standards & Air Traffic Services Series 'B', Part Ii 21 December, 2005 Effective: ForthwithShyam Sunder SinghNoch keine Bewertungen
- Hero Honda ProjectDokument53 SeitenHero Honda Projectmilancomputers67% (3)
- Chemical Equilibrium: An IntroductionDokument14 SeitenChemical Equilibrium: An Introductionyana LAUNoch keine Bewertungen
- NCR FormDokument2 SeitenNCR Formayse ocakciNoch keine Bewertungen
- DATWYLER Manual Functional Integrity 0715 enDokument104 SeitenDATWYLER Manual Functional Integrity 0715 en2zece100% (1)
- MSC - I Computer ScienceDokument43 SeitenMSC - I Computer ScienceSanket SaneNoch keine Bewertungen
- Installing SAP in Solaris 11 ClusterDokument37 SeitenInstalling SAP in Solaris 11 ClustercresmakNoch keine Bewertungen
- Air Cargo Import Export Project ReportDokument77 SeitenAir Cargo Import Export Project ReportShahbaz Ahmed AfsarNoch keine Bewertungen
- Embedded SystemsDokument16 SeitenEmbedded SystemsNguyễn Phương HuyNoch keine Bewertungen
- Robert Goddard Biography - Founder of Modern RocketryDokument8 SeitenRobert Goddard Biography - Founder of Modern RocketryIzza AiniNoch keine Bewertungen
- Chart+table From Ashrae PDFDokument3 SeitenChart+table From Ashrae PDFSurooshNoch keine Bewertungen
- Chemrite PP FibreDokument3 SeitenChemrite PP FibreICPL-RWPNoch keine Bewertungen
- TDA8425 Hi-Fi Stereo Audio Processor Data SheetDokument24 SeitenTDA8425 Hi-Fi Stereo Audio Processor Data SheetMuhammad IsmailNoch keine Bewertungen
- Azadmincodewater18 09Dokument129 SeitenAzadmincodewater18 09anovelli@Noch keine Bewertungen
- Directional Drilling - Sperry Drilling ServicesDokument98 SeitenDirectional Drilling - Sperry Drilling ServicesSlim.BNoch keine Bewertungen
- ESD Protection: Labour StandardsDokument7 SeitenESD Protection: Labour StandardsAKISNoch keine Bewertungen
- Pile Pull Out TestDokument6 SeitenPile Pull Out TestHemandra KumarNoch keine Bewertungen
- P34x EN AD G54Dokument48 SeitenP34x EN AD G54Adip Chy100% (1)
- Design and Fabrication of Die for Metal Powder CompactionDokument69 SeitenDesign and Fabrication of Die for Metal Powder CompactionMohit Assudani100% (2)