Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Paper 1 Searchable Symmetric Encryption With Forward Search PrivacyDokument15 SeitenPaper 1 Searchable Symmetric Encryption With Forward Search PrivacyPromise LoNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- List Lay Cable For ControlDokument5 SeitenList Lay Cable For ControlBayu SeptiadiNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Optima User GuideDokument158 SeitenOptima User GuideVikasNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Cisco SD-WAN Policy Architecture - Dana Yanch PDFDokument1 SeiteCisco SD-WAN Policy Architecture - Dana Yanch PDFEmilio PazNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Kiln Shell Laser ManualDokument19 SeitenKiln Shell Laser Manualบิ๊ก บิ๊กNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- 7.2.5 APQP Phase 2 Checklist Dec 2013Dokument21 Seiten7.2.5 APQP Phase 2 Checklist Dec 2013Mani Rathinam RajamaniNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- LIFI PresentationDokument15 SeitenLIFI PresentationAditya SinghNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- 5-HK5 Miniature Solenoid ValvesDokument6 Seiten5-HK5 Miniature Solenoid ValvessakscribNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- De Lorenzo - Smart Grid EngDokument29 SeitenDe Lorenzo - Smart Grid EngwrdlifeNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Chillers Sequence of OperationDokument23 SeitenChillers Sequence of OperationAshraf TurkyNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Service Charges Wef 01-Oct-2023Dokument11 SeitenService Charges Wef 01-Oct-2023Loona KKNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Ansible For Real-Life Automation - Gineesh MadapparambathDokument893 SeitenAnsible For Real-Life Automation - Gineesh Madapparambathvijayendra0% (1)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- VeriFast LVDT FAQDokument2 SeitenVeriFast LVDT FAQGerardoNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
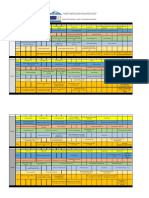
- Time Table Spring 2022-2023 V2Dokument3 SeitenTime Table Spring 2022-2023 V2moad alsaityNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Flexible Manufacturing System.Dokument11 SeitenFlexible Manufacturing System.Yaswanth saiNoch keine Bewertungen
- E-Waste An Overview On Generation, Collection, Legislation and Recycling Practices Denise PDFDokument11 SeitenE-Waste An Overview On Generation, Collection, Legislation and Recycling Practices Denise PDFThamirisAgmNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- 8 Latest Kitchen Chimney Brands in India 2020Dokument4 Seiten8 Latest Kitchen Chimney Brands in India 2020Sulagna ChowdhuryNoch keine Bewertungen
- B&R Automation Studio Target For SimulinkDokument76 SeitenB&R Automation Studio Target For SimulinkAdrian MeleroNoch keine Bewertungen
- DARCY CV - UpdatedDokument3 SeitenDARCY CV - UpdatedRodel CandelarioNoch keine Bewertungen
- ISO 39001 - Peter HartzellDokument33 SeitenISO 39001 - Peter HartzellJosefinaGarcía100% (2)
- Key Responsibility AreasDokument6 SeitenKey Responsibility AreasSubodh YadavNoch keine Bewertungen
- As 2159 2009 Piling Design and InstallationDokument9 SeitenAs 2159 2009 Piling Design and InstallationKinson LowNoch keine Bewertungen
- Riso Page CalculatorDokument19 SeitenRiso Page CalculatorNana Kwabena Ampem DarkoNoch keine Bewertungen
- Pe 001Dokument216 SeitenPe 001erivan bernardoNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Conveyor Safety Switches 2 5Dokument16 SeitenConveyor Safety Switches 2 5yatinthoratscrbNoch keine Bewertungen
- MOTOROLA Walkie Talkie Consumer Radio TLKR T80Dokument2 SeitenMOTOROLA Walkie Talkie Consumer Radio TLKR T80Sbnjkt aNoch keine Bewertungen
- Demantra SOP EBS Integration Process v1.0Dokument20 SeitenDemantra SOP EBS Integration Process v1.0kmurali321100% (1)
- CyberOps Skills Assessment - Student TRNG - ExamDokument4 SeitenCyberOps Skills Assessment - Student TRNG - ExamIsabella Leon67% (3)
- DTN NS3Dokument4 SeitenDTN NS3Mirza RizkyNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Manual de Reparacion MCR Serie 32-33Dokument34 SeitenManual de Reparacion MCR Serie 32-33Fernando Tapia Gibson100% (2)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)