Das könnte Ihnen auch gefallen
- EN 1992-1-1 Tabel 3.1 EN 1992-1-1 2.4.2.4 & Annex A Grade f (Mpa) f (Mpa) f (Mpa) E (Gpa) f (Mpa) ε ε nDokument12 SeitenEN 1992-1-1 Tabel 3.1 EN 1992-1-1 2.4.2.4 & Annex A Grade f (Mpa) f (Mpa) f (Mpa) E (Gpa) f (Mpa) ε ε njrandeepNoch keine Bewertungen
- HCS Ultimate Strength of PTDokument14 SeitenHCS Ultimate Strength of PTjrandeepNoch keine Bewertungen
- Stone Veneer-Faced PrecastDokument20 SeitenStone Veneer-Faced PrecastjrandeepNoch keine Bewertungen
- Foundation Design Wayne C Teng Clear DiagramDokument70 SeitenFoundation Design Wayne C Teng Clear DiagramjrandeepNoch keine Bewertungen
- Wall Calculation Example EC2Dokument15 SeitenWall Calculation Example EC2Kristjan Igasta88% (8)
- Shear Design of A Hollow Core SlabDokument17 SeitenShear Design of A Hollow Core SlabjrandeepNoch keine Bewertungen
- How To Design FoundationsDokument8 SeitenHow To Design Foundationsjrandeep0% (1)
- All Program Accessories Ease of Access On-Screen KeyboardDokument1 SeiteAll Program Accessories Ease of Access On-Screen KeyboardjrandeepNoch keine Bewertungen
- Beam Practical Design To Eurocode 2 - Sep 2013Dokument105 SeitenBeam Practical Design To Eurocode 2 - Sep 2013jrandeep100% (2)
- Two Way EccentricityDokument37 SeitenTwo Way Eccentricityjrandeep67% (3)
- Book Authors Publisher ISBN-10 ISBN-13 Edition/Pages Actual PriceDokument1 SeiteBook Authors Publisher ISBN-10 ISBN-13 Edition/Pages Actual PricejrandeepNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- G8DLL Q1W1 LC01Dokument10 SeitenG8DLL Q1W1 LC01Jonathan CanonigoNoch keine Bewertungen
- Syllabus Math1215 s22Dokument6 SeitenSyllabus Math1215 s22Jordane WayNoch keine Bewertungen
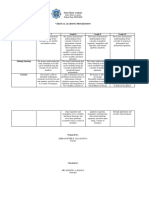
- 2nd Grade Ccss Math Rubric FinalDokument10 Seiten2nd Grade Ccss Math Rubric Finalapi-321011860100% (1)
- "Chapter 6 - Arches and Cables" in "Structural Analysis" On Manifold @tupress PDFDokument25 Seiten"Chapter 6 - Arches and Cables" in "Structural Analysis" On Manifold @tupress PDFGarimaNoch keine Bewertungen
- TrolfeDokument17 SeitenTrolfeMazMohNoch keine Bewertungen
- Class 6 - Chapter 3 Playing With NumbersDokument6 SeitenClass 6 - Chapter 3 Playing With Numbersmadhusudan.tandaleNoch keine Bewertungen
- Initial Value Problems For ODEsDokument38 SeitenInitial Value Problems For ODEsAyananta GuhaNoch keine Bewertungen
- Chapter 14 Equations of Straight Lines (直線方程) Tutorial Class (常規課堂)Dokument18 SeitenChapter 14 Equations of Straight Lines (直線方程) Tutorial Class (常規課堂)Tim ChanNoch keine Bewertungen
- Course Structure and Syllabus UG - R20: Department of Computer Science & EngineeringDokument41 SeitenCourse Structure and Syllabus UG - R20: Department of Computer Science & EngineeringSumanth 7899Noch keine Bewertungen
- Bangladesh University of Business and Technology (BUBT)Dokument2 SeitenBangladesh University of Business and Technology (BUBT)Ahadul IslamNoch keine Bewertungen
- Math SyllabusDokument4 SeitenMath Syllabusraki_sgNoch keine Bewertungen
- 41 Years MathsDokument625 Seiten41 Years MathsSanat KauravNoch keine Bewertungen
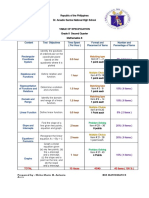
- One - Way Table of SpecificationDokument1 SeiteOne - Way Table of SpecificationElisha Marie AntonioNoch keine Bewertungen
- Symbiosis College of Arts & Commerce: Syllabus Tyba 2018-19Dokument42 SeitenSymbiosis College of Arts & Commerce: Syllabus Tyba 2018-19aaNoch keine Bewertungen
- Chapter FiveDokument37 SeitenChapter FiveLakachew GetasewNoch keine Bewertungen
- Tut 4 SolutionDokument7 SeitenTut 4 SolutionMortada OthmanNoch keine Bewertungen
- Khanacademy: Home Subjects KooreeDokument27 SeitenKhanacademy: Home Subjects KooreeKhouri PottsNoch keine Bewertungen
- CPB20203 Chapter1Dokument33 SeitenCPB20203 Chapter19xqyk4dpwbNoch keine Bewertungen
- Dynamic Simulation of Centrifugal Compre S Sor SystemsDokument10 SeitenDynamic Simulation of Centrifugal Compre S Sor SystemsabdelillahNoch keine Bewertungen
- Math Emetics ComputerDokument3 SeitenMath Emetics ComputerAbhisek MohantaNoch keine Bewertungen
- A Level Pure1 Oct2021 Mark SchemeDokument27 SeitenA Level Pure1 Oct2021 Mark Schememzino100406Noch keine Bewertungen
- Use To Summarize Harvard CalcDokument8 SeitenUse To Summarize Harvard CalcsytfuNoch keine Bewertungen
- JUMP Math CC AP Book 7-2 Sample RP7-31 To 35-0-0Dokument12 SeitenJUMP Math CC AP Book 7-2 Sample RP7-31 To 35-0-0Sónia RodriguesNoch keine Bewertungen
- Vertical Learning Progression MathematicsDokument2 SeitenVertical Learning Progression MathematicsEdrian Peter Villanueva100% (3)
- TOYO Piano PST Case v3Dokument14 SeitenTOYO Piano PST Case v3Andres Talavera100% (2)
- Scientific Machine Learning Through Physics-Informed Neural Networks: Where We Are and What's NextDokument67 SeitenScientific Machine Learning Through Physics-Informed Neural Networks: Where We Are and What's NextprfdjkdkvcssdNoch keine Bewertungen
- DLL Math8 Week9Dokument2 SeitenDLL Math8 Week9markaquinoNoch keine Bewertungen
- Class 3 - LP Introduction&Graphical SolutionDokument27 SeitenClass 3 - LP Introduction&Graphical SolutionStudy BuddyNoch keine Bewertungen
- Intro To Bifurcation TheoryDokument47 SeitenIntro To Bifurcation TheoryJohn StarrettNoch keine Bewertungen