Das könnte Ihnen auch gefallen
- Soduku Very HardDokument8 SeitenSoduku Very HardHelloWorldNoch keine Bewertungen
- Coaabr-Om Rev Original (1) AtoDokument250 SeitenCoaabr-Om Rev Original (1) AtoHelloWorld100% (1)
- Perfo Briefing 737Dokument61 SeitenPerfo Briefing 737Alessandro de Santis100% (5)
- ContrailsDokument3 SeitenContrailsHelloWorldNoch keine Bewertungen
- Airbus Call OutsDokument26 SeitenAirbus Call OutsHelloWorldNoch keine Bewertungen
- A380 Wake Vortex Working Processes and StatusDokument22 SeitenA380 Wake Vortex Working Processes and StatusHelloWorldNoch keine Bewertungen
- CX Environmental FactsheetDokument2 SeitenCX Environmental FactsheetHelloWorldNoch keine Bewertungen
- Look Inside Airline Pilot Workbook Website PDFDokument11 SeitenLook Inside Airline Pilot Workbook Website PDFMan Denzo50% (12)
- Cathay FleetDokument2 SeitenCathay FleetHelloWorldNoch keine Bewertungen
- Cathay Pacific destinations around the worldDokument2 SeitenCathay Pacific destinations around the worldHelloWorldNoch keine Bewertungen
- List of Dragonair DestinationsDokument3 SeitenList of Dragonair DestinationsHelloWorldNoch keine Bewertungen
- Code WX AerodromeDokument1 SeiteCode WX AerodromeHelloWorldNoch keine Bewertungen
- Trent 700 Series Issue 03Dokument9 SeitenTrent 700 Series Issue 03HelloWorldNoch keine Bewertungen
- Airbus 330 SG 2014Dokument18 SeitenAirbus 330 SG 2014HelloWorldNoch keine Bewertungen
- Airbus NotesDokument124 SeitenAirbus NotesHelloWorldNoch keine Bewertungen
- Range EnduranceDokument20 SeitenRange EnduranceHelloWorldNoch keine Bewertungen
- Airbus A318 A319 A320 A321Dokument24 SeitenAirbus A318 A319 A320 A321HelloWorldNoch keine Bewertungen
- EASA CFM International S.A. CFM56 5Band5C Series Engines 03 17122012Dokument15 SeitenEASA CFM International S.A. CFM56 5Band5C Series Engines 03 17122012dijayof87Noch keine Bewertungen
- SRG Pro 1050 Iss8Dokument10 SeitenSRG Pro 1050 Iss8HelloWorldNoch keine Bewertungen
- SRG Pro 1050 Iss8Dokument10 SeitenSRG Pro 1050 Iss8HelloWorldNoch keine Bewertungen
- EM 2001t01iDokument10 SeitenEM 2001t01iHelloWorldNoch keine Bewertungen
- Pages From JULY CVRDokument1 SeitePages From JULY CVRHelloWorldNoch keine Bewertungen
- A350 Factsheet - EnglishDokument4 SeitenA350 Factsheet - EnglishHelloWorldNoch keine Bewertungen
- 飛行之趣 另類出路 我在三萬八千尺漫步Dokument9 Seiten飛行之趣 另類出路 我在三萬八千尺漫步HelloWorldNoch keine Bewertungen
- Easa Tcds A 350 Issue-01Dokument14 SeitenEasa Tcds A 350 Issue-01HelloWorld100% (1)
- Cloud Types For ObserversDokument45 SeitenCloud Types For ObserversWilliam BrownNoch keine Bewertungen
- Full Text 01Dokument94 SeitenFull Text 01HelloWorldNoch keine Bewertungen
- A330 OxygenDokument17 SeitenA330 OxygenCarlos CuestasNoch keine Bewertungen
- World Jet Fuel Specifications 2005Dokument51 SeitenWorld Jet Fuel Specifications 2005Richo Crb100% (2)
- MAE331Lecture8 PDFDokument9 SeitenMAE331Lecture8 PDFBeatrice FiranNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Artisan: DefinitiveDokument37 SeitenArtisan: Definitivenestor parianiNoch keine Bewertungen
- B737 Load SheetDokument2 SeitenB737 Load Sheetkanavkashyap85% (13)
- List PDFDokument29 SeitenList PDFSahil AhmedNoch keine Bewertungen
- Draft SPECIFICATION For Power Quality RestorerDokument44 SeitenDraft SPECIFICATION For Power Quality RestorerPavanNoch keine Bewertungen
- Course Schedule IndiaDokument18 SeitenCourse Schedule IndiaBabulal Sahu0% (1)
- Easa Airworthiness Directive: AD No.: 2015-0089Dokument4 SeitenEasa Airworthiness Directive: AD No.: 2015-0089Anonymous SIS1ieNoch keine Bewertungen
- Group Assignment - Case Incident Report on Bus AccidentDokument1 SeiteGroup Assignment - Case Incident Report on Bus AccidentnikhilNoch keine Bewertungen
- Kamana Sewa Bikash Bank Summer ReportDokument42 SeitenKamana Sewa Bikash Bank Summer Reportumesh aryaNoch keine Bewertungen
- VW - DSG Component AgungDokument4 SeitenVW - DSG Component AgungAgung PurnamaNoch keine Bewertungen
- Delhi Mumbai Industrial Corridor Development Corporation Limited Room No. 341B, 03rd Floor, Hotel Ashok, Diplomatic Enclave, 50B ChanakyapuriDokument26 SeitenDelhi Mumbai Industrial Corridor Development Corporation Limited Room No. 341B, 03rd Floor, Hotel Ashok, Diplomatic Enclave, 50B ChanakyapuridiptilundiaNoch keine Bewertungen
- Technical Specification Saket Court Complex-Nit 108Dokument279 SeitenTechnical Specification Saket Court Complex-Nit 108Manoj RanaNoch keine Bewertungen
- Price List Part Yamaha Scorpio TH 2006Dokument12 SeitenPrice List Part Yamaha Scorpio TH 2006gualagiNoch keine Bewertungen
- Mechanic Repair Maintenance of Light Vehicles.163153836Dokument23 SeitenMechanic Repair Maintenance of Light Vehicles.163153836swami061009Noch keine Bewertungen
- Wolter Jetfan Broschuere English 2017 PDFDokument15 SeitenWolter Jetfan Broschuere English 2017 PDFViệt Đặng XuânNoch keine Bewertungen
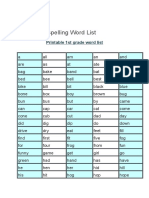
- 1st Grade Spelling Word ListDokument15 Seiten1st Grade Spelling Word ListAnonymous TswlBz100% (2)
- Backmap eDokument3 SeitenBackmap ealexstevenson01Noch keine Bewertungen
- Taz TFM 2021 003Dokument112 SeitenTaz TFM 2021 003Qiang LiuNoch keine Bewertungen
- Archery Facility Planning GuideDokument40 SeitenArchery Facility Planning GuideFatmah El WardagyNoch keine Bewertungen
- Lwha 133Dokument4 SeitenLwha 133Jhon Lewis PinoNoch keine Bewertungen
- XR-71 Oldie SCHDokument1 SeiteXR-71 Oldie SCHpetskNoch keine Bewertungen
- Forwarding AgentDokument4 SeitenForwarding AgentFakhrul HisyamNoch keine Bewertungen
- How To Travel by Train in Sri LankaDokument6 SeitenHow To Travel by Train in Sri LankaVlastimil BlechaNoch keine Bewertungen
- Roadworthiness Requirements: Vehicle Standards Information 26Dokument11 SeitenRoadworthiness Requirements: Vehicle Standards Information 26Natasha GlennNoch keine Bewertungen
- Route 534 Santa Monica MalibuDokument3 SeitenRoute 534 Santa Monica MalibudazulzulNoch keine Bewertungen
- Dual Fuel EnginesDokument51 SeitenDual Fuel EnginesAhmed shawkyNoch keine Bewertungen
- copeland-stream-digital-compressors-4MFD-13x-to-4MKD-35x-6mmd-30x-to-6MKD-50x - DWMDokument31 Seitencopeland-stream-digital-compressors-4MFD-13x-to-4MKD-35x-6mmd-30x-to-6MKD-50x - DWMdenilson carvalho guimaraesNoch keine Bewertungen
- E-RIDE User's GuideDokument16 SeitenE-RIDE User's GuideAyesha KhanNoch keine Bewertungen
- CDU Preflight & SetupDokument2 SeitenCDU Preflight & SetupJulio Aja AjaNoch keine Bewertungen
- Kockums Industrier Megaswing DUODokument6 SeitenKockums Industrier Megaswing DUOAnand Raj DoraisingamNoch keine Bewertungen