Das könnte Ihnen auch gefallen
- Review A: Vector Analysis: Massachusetts Institute of Technology Department of PhysicsDokument18 SeitenReview A: Vector Analysis: Massachusetts Institute of Technology Department of Physicsrahpooye313Noch keine Bewertungen
- Vectors EngDokument20 SeitenVectors EngRusmila DewiNoch keine Bewertungen
- Review: Vector Analysis: Massachusetts Institute of Technology Department of PhysicsDokument23 SeitenReview: Vector Analysis: Massachusetts Institute of Technology Department of PhysicsStelian PolenciucNoch keine Bewertungen
- Chapter 3: Vector Algebra: 3.1 Introduction To Vector AnalysisDokument20 SeitenChapter 3: Vector Algebra: 3.1 Introduction To Vector AnalysisGolden ChanNoch keine Bewertungen
- 1.mathematical PhysicsDokument33 Seiten1.mathematical PhysicsSk SajedulNoch keine Bewertungen
- Lecture 3 Chapter 3 Fall 2010Dokument17 SeitenLecture 3 Chapter 3 Fall 2010likhona madasaNoch keine Bewertungen
- Lecture 2 Review of Vector RelationDokument20 SeitenLecture 2 Review of Vector RelationfaniNoch keine Bewertungen
- ScalarsDokument11 SeitenScalarsbisratbirhanu52Noch keine Bewertungen
- Mechanics Chapter OneDokument8 SeitenMechanics Chapter OneYesgat enawgawNoch keine Bewertungen
- Vector Algebra: 5 LecturesDokument18 SeitenVector Algebra: 5 LecturestutulkarNoch keine Bewertungen
- Q2 Module 3 VectorsDokument17 SeitenQ2 Module 3 VectorsIrene DulayNoch keine Bewertungen
- Vectors v02Dokument18 SeitenVectors v02Stephanie Anne FortinNoch keine Bewertungen
- Chapter 3:vectors Scalars and VectorsDokument7 SeitenChapter 3:vectors Scalars and VectorsKAMAL KANT KUSHWAHANoch keine Bewertungen
- CH 3 8Dokument19 SeitenCH 3 8Shaivalini SharmaNoch keine Bewertungen
- Privatisation of Indian Railways.Dokument34 SeitenPrivatisation of Indian Railways.Aniket BabutaNoch keine Bewertungen
- 2018 Bookmatter ClassicalMechanics PDFDokument136 Seiten2018 Bookmatter ClassicalMechanics PDFSuraj GautamNoch keine Bewertungen
- MechanicsDokument104 SeitenMechanicsMerawi TilahunNoch keine Bewertungen
- Physics 1.2 Scalars and Vectors: ScalarDokument15 SeitenPhysics 1.2 Scalars and Vectors: Scalarps_daNoch keine Bewertungen
- 02A-Vector Calculus Part1Dokument18 Seiten02A-Vector Calculus Part1JDR JDRNoch keine Bewertungen
- Teaching Notes - (Xiii) : VectorsDokument10 SeitenTeaching Notes - (Xiii) : VectorsSankar KumarasamyNoch keine Bewertungen
- Review of Vector Analysis in Cartesian CoordinatesDokument21 SeitenReview of Vector Analysis in Cartesian CoordinatesHilmi ÖlmezNoch keine Bewertungen
- Physical Quantities & MEASUREMENTS (3 Hours)Dokument63 SeitenPhysical Quantities & MEASUREMENTS (3 Hours)Muhd Fadhlan NaqiuddinNoch keine Bewertungen
- Microsoft PowerPoint - 2. ELMAG - 1 - Vector AlgebraDokument43 SeitenMicrosoft PowerPoint - 2. ELMAG - 1 - Vector AlgebraDeni Ristianto100% (1)
- Scalar and Vectors-1Dokument31 SeitenScalar and Vectors-1Unilag FoundationNoch keine Bewertungen
- Chapter03 PDFDokument20 SeitenChapter03 PDFHamza ShabbirNoch keine Bewertungen
- Vector AnalysisDokument77 SeitenVector Analysisalenair888100% (1)
- Phy110 Chapter 2 StudentDokument38 SeitenPhy110 Chapter 2 StudentSOFIAH NAJWA BINTI SHAMSUDDINNoch keine Bewertungen
- BAB 3 BA501 Vector Dan ScalarDokument29 SeitenBAB 3 BA501 Vector Dan ScalarAriez AriantoNoch keine Bewertungen
- Phys245 Notes PDFDokument117 SeitenPhys245 Notes PDFfuckitNoch keine Bewertungen
- Markus Zahn SolucionaryDokument381 SeitenMarkus Zahn SolucionaryVillarroel Claros MichaelNoch keine Bewertungen
- PHY 121 Lecture 1Dokument5 SeitenPHY 121 Lecture 1Jerry Jabian LanticseNoch keine Bewertungen
- Vector Spaces: 2.1 R Through RDokument54 SeitenVector Spaces: 2.1 R Through RIlcham LynxNoch keine Bewertungen
- Vector AnalysisDokument76 SeitenVector AnalysisLuLu SzcahliszhNoch keine Bewertungen
- Vector AlgebraDokument0 SeitenVector Algebramothi26_pcmNoch keine Bewertungen
- CN W02D1 VectorsDokument21 SeitenCN W02D1 VectorsJuan Carlos Morales ParraNoch keine Bewertungen
- Chapter 1 Scalars and VectorsDokument14 SeitenChapter 1 Scalars and VectorsSolomon G.Noch keine Bewertungen
- Introduction To Vectors - WordToPdfDokument10 SeitenIntroduction To Vectors - WordToPdfCalvin LabialNoch keine Bewertungen
- Chapter 10 - Vector and Geometry SpaceDokument66 SeitenChapter 10 - Vector and Geometry SpaceRiyad MohammedNoch keine Bewertungen
- Vectors Tensors Complete PDFDokument198 SeitenVectors Tensors Complete PDFsujayan2005Noch keine Bewertungen
- VectorsDokument24 SeitenVectorscokoNoch keine Bewertungen
- EMT Electromagnetic Theory MODULE IDokument197 SeitenEMT Electromagnetic Theory MODULE ItearsomeNoch keine Bewertungen
- Forces in 3DDokument11 SeitenForces in 3DAdeboye BusayoNoch keine Bewertungen
- Chapter - 2 ElevenhDokument4 SeitenChapter - 2 ElevenhsaqibrahimkchiNoch keine Bewertungen
- Vector OperationDokument34 SeitenVector OperationLancel AlcantaraNoch keine Bewertungen
- Motion 2d AakashDokument10 SeitenMotion 2d AakashNavin RaiNoch keine Bewertungen
- Phy10 Wk01 Vector 1Dokument69 SeitenPhy10 Wk01 Vector 1Jed Efraim EspanilloNoch keine Bewertungen
- Vector LessonsDokument36 SeitenVector LessonsMarc RiveraNoch keine Bewertungen
- A Three Five Kilograms Twenty-Two Degrees Celsius: Scalar QuantitiesDokument6 SeitenA Three Five Kilograms Twenty-Two Degrees Celsius: Scalar QuantitiesDars- Limos SaludezNoch keine Bewertungen
- Lecture 01 Scalars and Vectors (Module Version)Dokument10 SeitenLecture 01 Scalars and Vectors (Module Version)John Lloyd GaringNoch keine Bewertungen
- Physics Chapter 2Dokument13 SeitenPhysics Chapter 2RaheEl Mukhtar0% (1)
- Review - of - vectors-Griffiths-Introduction To Electrodynamics (2017)Dokument9 SeitenReview - of - vectors-Griffiths-Introduction To Electrodynamics (2017)Bipanjit SinghNoch keine Bewertungen
- Chapter IDokument17 SeitenChapter IMD NAYM MIANoch keine Bewertungen
- Force Vectors, Vector Operations & Addition of Forces 2D & 3DDokument51 SeitenForce Vectors, Vector Operations & Addition of Forces 2D & 3DparklNoch keine Bewertungen
- Vector Class XiDokument5 SeitenVector Class Xisadafmurtaza231Noch keine Bewertungen
- 12 Math Notes CHP 10Dokument15 Seiten12 Math Notes CHP 10Shah KavishNoch keine Bewertungen
- Vector: Coordinate SystemDokument3 SeitenVector: Coordinate SystemManar AbdulrahmanNoch keine Bewertungen
- Master the Fundamentals of Electromagnetism and EM-InductionVon EverandMaster the Fundamentals of Electromagnetism and EM-InductionNoch keine Bewertungen
- ISEN 475 Syllabus Fall 2017 (Ver4)Dokument5 SeitenISEN 475 Syllabus Fall 2017 (Ver4)sheldon smithNoch keine Bewertungen
- Equation Sheet (Test 1) Phy 252 - Sp2015Dokument1 SeiteEquation Sheet (Test 1) Phy 252 - Sp2015sheldon smithNoch keine Bewertungen
- Differential Form of Gauss' Law (Calc 3 Connection)Dokument4 SeitenDifferential Form of Gauss' Law (Calc 3 Connection)sheldon smithNoch keine Bewertungen
- Gauss Law StrategiesDokument1 SeiteGauss Law Strategiessheldon smithNoch keine Bewertungen
- Not Just Another Winter Festival: Rabbi Reuven BrandDokument4 SeitenNot Just Another Winter Festival: Rabbi Reuven Brandoutdash2Noch keine Bewertungen
- Vocabulary Inglés.Dokument14 SeitenVocabulary Inglés.Psicoguía LatacungaNoch keine Bewertungen
- 7 CAAT-AIR-GM03 Guidance-Material-for-Foreign-Approved-Maintenance-Organization - I3R0 - 30oct2019 PDFDokument59 Seiten7 CAAT-AIR-GM03 Guidance-Material-for-Foreign-Approved-Maintenance-Organization - I3R0 - 30oct2019 PDFJindarat KasemsooksakulNoch keine Bewertungen
- 7 кмжDokument6 Seiten7 кмжGulzhaina KhabibovnaNoch keine Bewertungen
- Question 1 (1 Point) : SavedDokument31 SeitenQuestion 1 (1 Point) : SavedCates TorresNoch keine Bewertungen
- EFL Listeners' Strategy Development and Listening Problems: A Process-Based StudyDokument22 SeitenEFL Listeners' Strategy Development and Listening Problems: A Process-Based StudyCom DigfulNoch keine Bewertungen
- Bio Lab Report GerminationDokument10 SeitenBio Lab Report GerminationOli Damaskova100% (4)
- Did Angels Have WingsDokument14 SeitenDid Angels Have WingsArnaldo Esteves HofileñaNoch keine Bewertungen
- Laws and Policies of Fertilizers SectorDokument12 SeitenLaws and Policies of Fertilizers Sectorqry01327Noch keine Bewertungen
- AFI 90-901 Operational Risk ManagementDokument7 SeitenAFI 90-901 Operational Risk ManagementJohan Lai100% (1)
- Dialogue About Handling ComplaintDokument3 SeitenDialogue About Handling ComplaintKarimah Rameli100% (4)
- Title: Daily Visit Report: SDL Mini - Project Academic Year 2020-21 Group ID:GB6Dokument2 SeitenTitle: Daily Visit Report: SDL Mini - Project Academic Year 2020-21 Group ID:GB6Arjuna JppNoch keine Bewertungen
- Snowflake Core Certification Guide Dec 2022Dokument204 SeitenSnowflake Core Certification Guide Dec 2022LalitNoch keine Bewertungen
- CO-PO MappingDokument6 SeitenCO-PO MappingArun Kumar100% (1)
- Use Reuse and Salvage Guidelines For Measurements of Crankshafts (1202)Dokument7 SeitenUse Reuse and Salvage Guidelines For Measurements of Crankshafts (1202)TASHKEELNoch keine Bewertungen
- JurisprudenceDokument11 SeitenJurisprudenceTamojit DasNoch keine Bewertungen
- Knowledge, Attitude and Practice of Non-Allied Health Sciences Students of Southwestern University Phinma During The Covid-19 PandemicDokument81 SeitenKnowledge, Attitude and Practice of Non-Allied Health Sciences Students of Southwestern University Phinma During The Covid-19 Pandemicgeorgemayhew1030Noch keine Bewertungen
- Student Management System - Full DocumentDokument46 SeitenStudent Management System - Full DocumentI NoNoch keine Bewertungen
- Install GuideDokument64 SeitenInstall GuideJorge Luis Yaya Cruzado67% (3)
- SBP Notes-1 PDFDokument7 SeitenSBP Notes-1 PDFzeeshanNoch keine Bewertungen
- Forensic BallisticsDokument23 SeitenForensic BallisticsCristiana Jsu DandanNoch keine Bewertungen
- 5.4 Marketing Arithmetic For Business AnalysisDokument12 Seiten5.4 Marketing Arithmetic For Business AnalysisashNoch keine Bewertungen
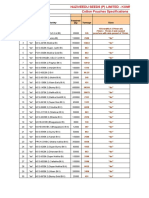
- Cotton Pouches SpecificationsDokument2 SeitenCotton Pouches SpecificationspunnareddytNoch keine Bewertungen
- Judges Kings ProphetsDokument60 SeitenJudges Kings ProphetsKim John BolardeNoch keine Bewertungen
- ZultaniteDokument4 SeitenZultaniteAcharya BalwantNoch keine Bewertungen
- Construction Agreement SimpleDokument3 SeitenConstruction Agreement Simpleben_23100% (4)
- Army War College PDFDokument282 SeitenArmy War College PDFWill100% (1)
- Corrugated Board Bonding Defect VisualizDokument33 SeitenCorrugated Board Bonding Defect VisualizVijaykumarNoch keine Bewertungen
- Astm C1898 20Dokument3 SeitenAstm C1898 20Shaik HussainNoch keine Bewertungen