Das könnte Ihnen auch gefallen
- Oracle Fusion Financials Book Set Home Page SummaryDokument274 SeitenOracle Fusion Financials Book Set Home Page SummaryAbhishek Agrawal100% (1)
- Serial Port Complete: COM Ports, USB Virtual COM Ports, and Ports for Embedded SystemsVon EverandSerial Port Complete: COM Ports, USB Virtual COM Ports, and Ports for Embedded SystemsBewertung: 3.5 von 5 Sternen3.5/5 (9)
- Microprocessor and Applications (EC1303) - Question BankDokument39 SeitenMicroprocessor and Applications (EC1303) - Question BankDr. N.Shanmugasundaram86% (21)
- Verilog HDL Implementation of Usb To Ethernet ConverterDokument6 SeitenVerilog HDL Implementation of Usb To Ethernet ConverterRenukaNoch keine Bewertungen
- I O and The South BridgeDokument5 SeitenI O and The South BridgeMarceloNoch keine Bewertungen
- Exploring BeagleBone: Tools and Techniques for Building with Embedded LinuxVon EverandExploring BeagleBone: Tools and Techniques for Building with Embedded LinuxBewertung: 4 von 5 Sternen4/5 (1)
- PlayStation Architecture: Architecture of Consoles: A Practical Analysis, #6Von EverandPlayStation Architecture: Architecture of Consoles: A Practical Analysis, #6Noch keine Bewertungen
- From GSM to LTE-Advanced Pro and 5G: An Introduction to Mobile Networks and Mobile BroadbandVon EverandFrom GSM to LTE-Advanced Pro and 5G: An Introduction to Mobile Networks and Mobile BroadbandNoch keine Bewertungen
- Isa 2 UsbDokument6 SeitenIsa 2 UsbJaffer SultanNoch keine Bewertungen
- Usbkbd 5Dokument25 SeitenUsbkbd 5youcef88Noch keine Bewertungen
- AN3560Dokument34 SeitenAN3560Henry RodriguezNoch keine Bewertungen
- MCBSC and MCTC ArchitectureDokument6 SeitenMCBSC and MCTC ArchitectureAmol PatilNoch keine Bewertungen
- Eb355 80 4Dokument44 SeitenEb355 80 4David CochlinNoch keine Bewertungen
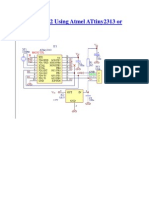
- USB to RS232 Converter Using Atmel MicrocontrollersDokument4 SeitenUSB to RS232 Converter Using Atmel Microcontrollersmikcomi100% (1)
- USB to RS232 Converter Using Atmel MicrocontrollersDokument4 SeitenUSB to RS232 Converter Using Atmel MicrocontrollersNugraha Indrawan100% (2)
- Base Band Modem Hardware Design: P. Antognoni, E. Sereni, S. Cacopardi, S. Carlini, M. ScafiDokument5 SeitenBase Band Modem Hardware Design: P. Antognoni, E. Sereni, S. Cacopardi, S. Carlini, M. Scafikokome35Noch keine Bewertungen
- ASSIGNMENT 1 (Embd&IOmT)Dokument9 SeitenASSIGNMENT 1 (Embd&IOmT)rakesh.jNoch keine Bewertungen
- Wireless Handheld Ordering Terminal Based On Embedded SystemDokument6 SeitenWireless Handheld Ordering Terminal Based On Embedded SystemGaurav PohujaNoch keine Bewertungen
- Question No. - 1 (A) : SolutionDokument41 SeitenQuestion No. - 1 (A) : SolutionShivangi Maheshwari100% (1)
- Emerson DCS PresentationDokument25 SeitenEmerson DCS Presentationruchikaporwal2018Noch keine Bewertungen
- A Rapid Prototyping Environment For Microprocessor Based System-on-Chips and Its Application To The Development of A Network ProcessorDokument4 SeitenA Rapid Prototyping Environment For Microprocessor Based System-on-Chips and Its Application To The Development of A Network ProcessorSamNoch keine Bewertungen
- Hello ThereDokument6 SeitenHello TherekeerthanNoch keine Bewertungen
- I/O System Standards: Serial, Parallel, PCI, SCSI, USBDokument10 SeitenI/O System Standards: Serial, Parallel, PCI, SCSI, USBJochumNoch keine Bewertungen
- Datasheet BCM2835 ARM PeripheralsDokument205 SeitenDatasheet BCM2835 ARM PeripheralsrickyjamesNoch keine Bewertungen
- Fingur+gsm Based Locker SystemDokument48 SeitenFingur+gsm Based Locker SystemGaus PatelNoch keine Bewertungen
- FPGA Implementation of USB 2.0 Receiver ProtocolDokument5 SeitenFPGA Implementation of USB 2.0 Receiver ProtocolAldo RodNoch keine Bewertungen
- Study and Development of PIC Microcontroller-to-PC Communication Via USBDokument4 SeitenStudy and Development of PIC Microcontroller-to-PC Communication Via USBbizbiNoch keine Bewertungen
- USB Project BookDokument60 SeitenUSB Project BookVara Prasad VemulaNoch keine Bewertungen
- Embedded Systems I/O: Version 2 EE IIT, Kharagpur 1Dokument10 SeitenEmbedded Systems I/O: Version 2 EE IIT, Kharagpur 1ahamed100% (2)
- Compare These Arm Architectures: ARM7TDMI and ARM9TDMI. AnswerDokument6 SeitenCompare These Arm Architectures: ARM7TDMI and ARM9TDMI. Answersatinder singhNoch keine Bewertungen
- 23 Computer Application Commerce Unit-02Dokument42 Seiten23 Computer Application Commerce Unit-02Kishore KrishnanNoch keine Bewertungen
- FPGA-based multi-protocol data acquisition systemDokument4 SeitenFPGA-based multi-protocol data acquisition systemVibin MammenNoch keine Bewertungen
- Es Notes Unit 3Dokument7 SeitenEs Notes Unit 3Sai ReddyNoch keine Bewertungen
- ARM Question Bank Unit - 5Dokument14 SeitenARM Question Bank Unit - 5sakthivelv.eecNoch keine Bewertungen
- Alcatel-Lucent Omnipcx Enterprise Communication ServerDokument14 SeitenAlcatel-Lucent Omnipcx Enterprise Communication ServerAnh Tuấn Trần100% (1)
- USB Sensor Network For Industrial ApplicationsDokument6 SeitenUSB Sensor Network For Industrial Applicationsm_bhaskarkNoch keine Bewertungen
- Lab2 MotorControl 08Dokument18 SeitenLab2 MotorControl 08ĐạiDương100% (1)
- EDK Tutorial 1Dokument28 SeitenEDK Tutorial 1roopeshparanandiNoch keine Bewertungen
- 13.1 A Fully-Integrated Single-Chip SOC For BluetoothDokument3 Seiten13.1 A Fully-Integrated Single-Chip SOC For BluetoothkurabyqldNoch keine Bewertungen
- Data Communication Lab GuideDokument105 SeitenData Communication Lab GuideTalha HashmiNoch keine Bewertungen
- The Hardware Side - Part 1: An IntroductionDokument68 SeitenThe Hardware Side - Part 1: An Introductionragavendra4Noch keine Bewertungen
- Embedded System SolveDokument15 SeitenEmbedded System SolveAshish OjhaNoch keine Bewertungen
- CPU7Dokument16 SeitenCPU7sunnymachoo100% (1)
- I Jcs It 2014050173Dokument3 SeitenI Jcs It 2014050173NikhithaNoch keine Bewertungen
- Give All The Parts of The Motherboard and Give Each Part Description. 1. CPU (Central Processing Unit) ChipDokument7 SeitenGive All The Parts of The Motherboard and Give Each Part Description. 1. CPU (Central Processing Unit) ChipjanNoch keine Bewertungen
- USB Overview: This Course Serves As An Introduction To USBDokument68 SeitenUSB Overview: This Course Serves As An Introduction To USBDien Nguyen100% (1)
- Motherboard Parts and Functions GuideDokument15 SeitenMotherboard Parts and Functions Guidekeisha santiagoNoch keine Bewertungen
- 8085 Chapter9Dokument6 Seiten8085 Chapter9Amir Hossein Javan AmoliNoch keine Bewertungen
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Von EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Noch keine Bewertungen
- CompTIA A+ CertMike: Prepare. Practice. Pass the Test! Get Certified!: Core 1 Exam 220-1101Von EverandCompTIA A+ CertMike: Prepare. Practice. Pass the Test! Get Certified!: Core 1 Exam 220-1101Noch keine Bewertungen
- Digital Electronics, Computer Architecture and Microprocessor Design PrinciplesVon EverandDigital Electronics, Computer Architecture and Microprocessor Design PrinciplesNoch keine Bewertungen
- Foundation Course for Advanced Computer StudiesVon EverandFoundation Course for Advanced Computer StudiesNoch keine Bewertungen
- Mobile Terminal Receiver Design: LTE and LTE-AdvancedVon EverandMobile Terminal Receiver Design: LTE and LTE-AdvancedNoch keine Bewertungen
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkVon EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNoch keine Bewertungen
- PlayStation 2 Architecture: Architecture of Consoles: A Practical Analysis, #12Von EverandPlayStation 2 Architecture: Architecture of Consoles: A Practical Analysis, #12Noch keine Bewertungen
- Gain-Cell Embedded DRAMs for Low-Power VLSI Systems-on-ChipVon EverandGain-Cell Embedded DRAMs for Low-Power VLSI Systems-on-ChipNoch keine Bewertungen
- GSM Door Control ArduinoDokument20 SeitenGSM Door Control ArduinojanepriceNoch keine Bewertungen
- ESP8266 Wi-Fi DatasheetDokument31 SeitenESP8266 Wi-Fi DatasheetMert Solkıran100% (2)
- Zigb Contrld DumpsterDokument5 SeitenZigb Contrld DumpsterjanepriceNoch keine Bewertungen
- SPI ProtocolDokument8 SeitenSPI Protocolpraveenbc100% (2)
- BSNL Je PDFDokument39 SeitenBSNL Je PDFjanepriceNoch keine Bewertungen
- Recognition Handwritten Malayalam CharactersDokument7 SeitenRecognition Handwritten Malayalam CharactersjanepriceNoch keine Bewertungen
- A Survey of Iot Cloud Platforms: SciencedirectDokument12 SeitenA Survey of Iot Cloud Platforms: SciencedirectjanepriceNoch keine Bewertungen
- MQ 6Dokument2 SeitenMQ 6api-3850017Noch keine Bewertungen
- GATE ECE 2017 Question PaperDokument23 SeitenGATE ECE 2017 Question PaperDevendra ChauhanNoch keine Bewertungen
- Big Data AnalyticsDokument31 SeitenBig Data Analyticsjaneprice100% (1)
- HC-SR04 Ultrasonic PDFDokument3 SeitenHC-SR04 Ultrasonic PDFjanepriceNoch keine Bewertungen
- MQ 3Dokument2 SeitenMQ 3Farshad yazdiNoch keine Bewertungen
- Optimizing The Implementation of SEC-DAEC Codes in FPGAsDokument5 SeitenOptimizing The Implementation of SEC-DAEC Codes in FPGAsjanepriceNoch keine Bewertungen
- Scalable Elliptic Curve Cryptosystem FPGA Processor For NIST Prime CurvesDokument4 SeitenScalable Elliptic Curve Cryptosystem FPGA Processor For NIST Prime CurvesjanepriceNoch keine Bewertungen
- A Combined SDC-SDF Architecture For Normal I/O Pipelined Radix-2 FFTDokument5 SeitenA Combined SDC-SDF Architecture For Normal I/O Pipelined Radix-2 FFTjanepriceNoch keine Bewertungen
- Vector Quantization TechniquesDokument48 SeitenVector Quantization Techniqueschelikanikeerthana_2Noch keine Bewertungen
- FIFO NoCDokument7 SeitenFIFO NoCjanepriceNoch keine Bewertungen
- Core E4Dokument5 SeitenCore E4janepriceNoch keine Bewertungen
- 2015 LDPCDokument11 Seiten2015 LDPCjanepriceNoch keine Bewertungen
- I2c RTCDokument4 SeitenI2c RTCjanepriceNoch keine Bewertungen
- Ultrasonic Ranging Module HC - SR04: Product FeaturesDokument3 SeitenUltrasonic Ranging Module HC - SR04: Product FeaturesjanepriceNoch keine Bewertungen
- MQ 3Dokument2 SeitenMQ 3Farshad yazdiNoch keine Bewertungen
- Lab 5Dokument17 SeitenLab 5amreshjha22Noch keine Bewertungen
- ESP8266 Wi-Fi DatasheetDokument31 SeitenESP8266 Wi-Fi DatasheetMert Solkıran100% (2)
- Lab 5Dokument17 SeitenLab 5amreshjha22Noch keine Bewertungen
- HT9170B/HT9170D DTMF Receiver: FeaturesDokument14 SeitenHT9170B/HT9170D DTMF Receiver: FeaturesjanepriceNoch keine Bewertungen
- Design of Priority Encoding Based Reversible ComparatorsDokument4 SeitenDesign of Priority Encoding Based Reversible ComparatorsjanepriceNoch keine Bewertungen
- Ieee-Concurrent Error Detection of EncoderDokument9 SeitenIeee-Concurrent Error Detection of EncoderjanepriceNoch keine Bewertungen
- A Usb 2.0 C Processo Ontroller For An ARM7 or Implemented in FPG 7TDM-S GADokument4 SeitenA Usb 2.0 C Processo Ontroller For An ARM7 or Implemented in FPG 7TDM-S GAjanepriceNoch keine Bewertungen
- Kastanakis 2014Dokument8 SeitenKastanakis 2014Andreea Georgiana MocanuNoch keine Bewertungen
- Classification of Textile Testing - OrDNURDokument6 SeitenClassification of Textile Testing - OrDNURKazi ShorifNoch keine Bewertungen
- Intec Waste PresiDokument8 SeitenIntec Waste Presiapi-369931794Noch keine Bewertungen
- The Life and Works of Jose RizalDokument20 SeitenThe Life and Works of Jose RizalBemtot Blanquig100% (1)
- English Skills BookDokument49 SeitenEnglish Skills BookAngela SpadeNoch keine Bewertungen
- JR Hydraulic Eng. Waterways Bed Protection Incomat BelfastDokument2 SeitenJR Hydraulic Eng. Waterways Bed Protection Incomat Belfastpablopadawan1Noch keine Bewertungen
- Color Codes and Irregular Marking-SampleDokument23 SeitenColor Codes and Irregular Marking-Samplemahrez laabidiNoch keine Bewertungen
- E PortfolioDokument76 SeitenE PortfolioMAGALLON ANDREWNoch keine Bewertungen
- Lab ReportDokument5 SeitenLab ReportHugsNoch keine Bewertungen
- City of Brescia - Map - WWW - Bresciatourism.itDokument1 SeiteCity of Brescia - Map - WWW - Bresciatourism.itBrescia TourismNoch keine Bewertungen
- Chapter 08Dokument18 SeitenChapter 08soobraNoch keine Bewertungen
- STEM Spring 2023 SyllabusDokument5 SeitenSTEM Spring 2023 SyllabusRollins MAKUWANoch keine Bewertungen
- Mole Concept - DPP 09 (Of Lec 13) - Yakeen 2.0 2024 (Legend)Dokument3 SeitenMole Concept - DPP 09 (Of Lec 13) - Yakeen 2.0 2024 (Legend)Romeshchandra Class X-CNoch keine Bewertungen
- Assessing Eyes NCM 103 ChecklistDokument7 SeitenAssessing Eyes NCM 103 ChecklistNicole NipasNoch keine Bewertungen
- Brooks Cole Empowerment Series Becoming An Effective Policy Advocate 7Th Edition Jansson Solutions Manual Full Chapter PDFDokument36 SeitenBrooks Cole Empowerment Series Becoming An Effective Policy Advocate 7Th Edition Jansson Solutions Manual Full Chapter PDFlois.guzman538100% (12)
- 9 - NCP Computer Science PGDokument19 Seiten9 - NCP Computer Science PGM AmbreenNoch keine Bewertungen
- Tugas B InggrisDokument6 SeitenTugas B Inggrisiqbal baleNoch keine Bewertungen
- Grade 10Dokument39 SeitenGrade 10amareNoch keine Bewertungen
- AP Euro Unit 2 Study GuideDokument11 SeitenAP Euro Unit 2 Study GuideexmordisNoch keine Bewertungen
- SIM5320 - EVB Kit - User Guide - V1.01 PDFDokument24 SeitenSIM5320 - EVB Kit - User Guide - V1.01 PDFmarkissmuzzoNoch keine Bewertungen
- Genre Worksheet 03 PDFDokument2 SeitenGenre Worksheet 03 PDFmelissaNoch keine Bewertungen
- CCEE SWD Basic Levers ToolDokument28 SeitenCCEE SWD Basic Levers ToolDivina Margarita Gómez AlvarengaNoch keine Bewertungen
- Ilham Bahasa InggrisDokument12 SeitenIlham Bahasa Inggrisilhamwicaksono835Noch keine Bewertungen
- Galvanometer: Project Prepared By:-Name - Pragati Singh Class - Xii A AcknowledgementDokument11 SeitenGalvanometer: Project Prepared By:-Name - Pragati Singh Class - Xii A AcknowledgementANURAG SINGHNoch keine Bewertungen
- CHB 2Dokument15 SeitenCHB 2Dr. Guruprasad Yashwant GadgilNoch keine Bewertungen
- Ireland in Pre Celtic TimesDokument398 SeitenIreland in Pre Celtic TimesGrant MacDonald100% (5)
- Chemical Cleaning Products Are Destroying The Ecosystem and Your Septic Tank - Organica BiotechDokument14 SeitenChemical Cleaning Products Are Destroying The Ecosystem and Your Septic Tank - Organica BiotechKrispin FongNoch keine Bewertungen
- Center of Gravity and Shear Center of Thin-Walled Open-Section Composite BeamsDokument6 SeitenCenter of Gravity and Shear Center of Thin-Walled Open-Section Composite Beamsredz00100% (1)