Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- CAD-based Design of Three Phase Transformer and CoDokument13 SeitenCAD-based Design of Three Phase Transformer and CoM4gne7icNoch keine Bewertungen
- Research Proposal TransformerDokument3 SeitenResearch Proposal Transformersohalder1026Noch keine Bewertungen
- Esam AliDokument23 SeitenEsam AliYoussef AliNoch keine Bewertungen
- Wasif CVDokument2 SeitenWasif CVTalha BaigNoch keine Bewertungen
- PowerPoint Practice Exercise 1 InstructionsDokument3 SeitenPowerPoint Practice Exercise 1 InstructionsErick OumaNoch keine Bewertungen
- Model 793.00 System SoftwareDokument750 SeitenModel 793.00 System SoftwareMichel Zarzosa RojasNoch keine Bewertungen
- ManageEngine Application Manager Best PracticesDokument12 SeitenManageEngine Application Manager Best PracticesNghiêm Sỹ Tâm PhươngNoch keine Bewertungen
- Syllabus 3210 Fall 2012 PDFDokument4 SeitenSyllabus 3210 Fall 2012 PDFRahul KarnaNoch keine Bewertungen
- Joining ProcessDokument122 SeitenJoining ProcessJackson ..Noch keine Bewertungen
- 10 - Chapter 4 PDFDokument143 Seiten10 - Chapter 4 PDFKalyan ChakravarthyNoch keine Bewertungen
- Optimum Policy ControlDokument4 SeitenOptimum Policy ControlKimberly VargasNoch keine Bewertungen
- Change ManDokument17 SeitenChange Mansrikanth9gannuNoch keine Bewertungen
- CTX 310 Communication With Fast Ethernet Board V2 (Fanuc)Dokument34 SeitenCTX 310 Communication With Fast Ethernet Board V2 (Fanuc)iveNoch keine Bewertungen
- New ScriptDokument2 SeitenNew ScriptDeveloper 4Noch keine Bewertungen
- RF Optimization Tips - TCH Block Rate Optimization Tips in Huawei GSMDokument4 SeitenRF Optimization Tips - TCH Block Rate Optimization Tips in Huawei GSMdolisieNoch keine Bewertungen
- PU225 Series: Solenoid ValveDokument1 SeitePU225 Series: Solenoid Valveremus popescuNoch keine Bewertungen
- Prediction of Graduate Admission IEEE - 2020Dokument6 SeitenPrediction of Graduate Admission IEEE - 2020Anu RamanujamNoch keine Bewertungen
- CS405PC JP Unit-3Dokument44 SeitenCS405PC JP Unit-3MEGHANA 3Noch keine Bewertungen
- DREHMO Matic-C ENDokument36 SeitenDREHMO Matic-C ENsimbamikeNoch keine Bewertungen
- Calculate Quantities of Materials For Concrete - Cement, Sand, AggregatesDokument7 SeitenCalculate Quantities of Materials For Concrete - Cement, Sand, Aggregatesvenkateswara rao pothinaNoch keine Bewertungen
- Guide c07 742458Dokument14 SeitenGuide c07 742458Chen ComseNoch keine Bewertungen
- Chapter 3.1 - Igneous RockDokument64 SeitenChapter 3.1 - Igneous Rockalvinllp83Noch keine Bewertungen
- CA Abb V-ContactDokument92 SeitenCA Abb V-ContactWiliam CopacatiNoch keine Bewertungen
- UK Assemblies PDFDokument284 SeitenUK Assemblies PDFFernando Borges ChachaNoch keine Bewertungen
- TractionDokument26 SeitenTractionYogesh GurjarNoch keine Bewertungen
- Rules, Scripts and BeanshellDokument7 SeitenRules, Scripts and BeanshelltgudyktzxNoch keine Bewertungen
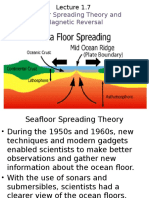
- Seafloor Spreading TheoryDokument16 SeitenSeafloor Spreading TheoryMark Anthony Evangelista Cabrieto100% (1)
- G3600 A4 Brochures PDFDokument4 SeitenG3600 A4 Brochures PDFVictor NunezNoch keine Bewertungen
- Chinese Journal of Traumatology: Geley Ete, Gaurav Chaturvedi, Elvino Barreto, Kingsly Paul MDokument4 SeitenChinese Journal of Traumatology: Geley Ete, Gaurav Chaturvedi, Elvino Barreto, Kingsly Paul MZilga ReginaNoch keine Bewertungen
- Solubility PDFDokument36 SeitenSolubility PDFAshwin Narayan100% (1)