Das könnte Ihnen auch gefallen
- Multiwii Software GUIDEDokument10 SeitenMultiwii Software GUIDEHiroshi TakeshiNoch keine Bewertungen
- Honda Site GeneralInstructionsDokument1 SeiteHonda Site GeneralInstructionspepedelatorreNoch keine Bewertungen
- Tutorial GPS DomeDokument11 SeitenTutorial GPS DomeAssur AlNoch keine Bewertungen
- Kongsberg MRU 5th Gen Software UpgradeDokument2 SeitenKongsberg MRU 5th Gen Software UpgradeAR El Patron KadryNoch keine Bewertungen
- Manual Gigabyte Ga z87 d3hpDokument104 SeitenManual Gigabyte Ga z87 d3hpslade3Noch keine Bewertungen
- VB Sinhala BookDokument254 SeitenVB Sinhala BookViduranga BandaraNoch keine Bewertungen
- InstallationDokument7 SeitenInstallationAzni Khail NovemberNoch keine Bewertungen
- Plasma Mal Discharge Fix (For CD)Dokument31 SeitenPlasma Mal Discharge Fix (For CD)spolar74750% (2)
- MB Manual Ga-z87x-Ud3h eDokument124 SeitenMB Manual Ga-z87x-Ud3h ejazz240% (1)
- Sarotech Abigs T6 ManualDokument74 SeitenSarotech Abigs T6 ManualAngelevNoch keine Bewertungen
- MB Manual Ga-Z87 (h87) - Hd3 eDokument100 SeitenMB Manual Ga-Z87 (h87) - Hd3 estarlaysNoch keine Bewertungen
- Pancode ManualDokument17 SeitenPancode ManualDavide SestiNoch keine Bewertungen
- Reference Manual PD 8500Dokument96 SeitenReference Manual PD 8500jcontractorNoch keine Bewertungen
- Galaxy S6 Boot RecoveryDokument15 SeitenGalaxy S6 Boot RecoveryAhmed AdelNoch keine Bewertungen
- #HDD #Notdetected #HarddiskDokument71 Seiten#HDD #Notdetected #HarddisksebastianNoch keine Bewertungen
- The DB9-USB Family of UART Converter Modules: DatasheetDokument26 SeitenThe DB9-USB Family of UART Converter Modules: DatasheetScoundrel ByteNoch keine Bewertungen
- U÷: 09 (KW Úduvi-01) : FVM©B: B F I, 2021 WL ÷vãDokument15 SeitenU÷: 09 (KW Úduvi-01) : FVM©B: B F I, 2021 WL ÷vãiliyas shahNoch keine Bewertungen
- PSR-S700 S900 Ov2 CDokument3 SeitenPSR-S700 S900 Ov2 CAdriano Camocardi100% (1)
- Asus Rog Gu502du Rev2.1Dokument104 SeitenAsus Rog Gu502du Rev2.1Павел В. (Bis Nival - IrBis Snow)Noch keine Bewertungen
- Improve EEPROM ISP with CarProg Hardware ModDokument1 SeiteImprove EEPROM ISP with CarProg Hardware Modbogdan_cornea_ro522Noch keine Bewertungen
- MB Manual Ga-E3800n eDokument31 SeitenMB Manual Ga-E3800n eapm11426Noch keine Bewertungen
- NT - Siemens - Mse3.7 - Rotax: Plugin 330:new TrasdataDokument3 SeitenNT - Siemens - Mse3.7 - Rotax: Plugin 330:new TrasdataHumberto Cadori FilhoNoch keine Bewertungen
- Transponder ID 48Dokument2 SeitenTransponder ID 48Cesar MartinsNoch keine Bewertungen
- Realtek 8111F SpecDokument2 SeitenRealtek 8111F SpecPan RongNoch keine Bewertungen
- Korg User Net: Shop: ReceiptDokument2 SeitenKorg User Net: Shop: Receipttigerstyle1Noch keine Bewertungen
- Uninstall bloatware docomo oreoDokument1 SeiteUninstall bloatware docomo oreoDaffa AfrialNoch keine Bewertungen
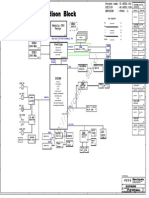
- Lenovo IH61M Block DiagramDokument33 SeitenLenovo IH61M Block Diagramsamarittano2Noch keine Bewertungen
- Dev Kit 1207Dokument13 SeitenDev Kit 1207alexandre.oneill2479Noch keine Bewertungen
- Ultimate GpsDokument27 SeitenUltimate GpsAbimael ChampoNoch keine Bewertungen
- Crius All in One Pro V1.3docxDokument9 SeitenCrius All in One Pro V1.3docxAdrian TudorNoch keine Bewertungen
- Data SheetDokument44 SeitenData SheetDani SosaNoch keine Bewertungen
- SGM 108 Manual en v1.0Dokument21 SeitenSGM 108 Manual en v1.0arunraja98Noch keine Bewertungen
- Dsa 00376113Dokument4 SeitenDsa 00376113गणेश पराजुलीNoch keine Bewertungen
- Manual For Cycle 1Dokument193 SeitenManual For Cycle 1Seth GreeneNoch keine Bewertungen
- Pcan-Gps: User ManualDokument38 SeitenPcan-Gps: User ManualKrum KashavarovNoch keine Bewertungen
- Wistron Jv71-Mv 09924-1 Rev.-1Dokument62 SeitenWistron Jv71-Mv 09924-1 Rev.-1Antonijo SmrdeljNoch keine Bewertungen
- Inside Samsung Galaxy S III GT-I9300Dokument8 SeitenInside Samsung Galaxy S III GT-I9300Victor EmanuelNoch keine Bewertungen
- CriusMegaGuide v1 1Dokument36 SeitenCriusMegaGuide v1 1moriwaky11133413Noch keine Bewertungen
- PIC-P67J60 Development Board Users Manual: Rev. C, December 2009Dokument18 SeitenPIC-P67J60 Development Board Users Manual: Rev. C, December 2009Jaime Alberto Bolaños Eraso100% (2)
- Epox 8RDA3i Mainboard English ManualDokument90 SeitenEpox 8RDA3i Mainboard English ManualDan BanNoch keine Bewertungen
- MultiWii GPS Assited Position Hold and RTH by EOSbandiDokument7 SeitenMultiWii GPS Assited Position Hold and RTH by EOSbandiDicky DectaviansyahNoch keine Bewertungen
- Image Capture Using PRP, Csi, and I C: Mc9328Mx21Dokument18 SeitenImage Capture Using PRP, Csi, and I C: Mc9328Mx21Sharmili Nukapeyi NNoch keine Bewertungen
- Pacsystems Rx3I Mid-Range Controller Pacsystems ControlDokument53 SeitenPacsystems Rx3I Mid-Range Controller Pacsystems ControlManoel Machado BarbosaNoch keine Bewertungen
- 8051 LAB Manual NewDokument189 Seiten8051 LAB Manual New9491104570100% (2)
- SkyNav SKM55 DSDokument11 SeitenSkyNav SKM55 DSAnugrah Achmad0% (1)
- Service Manual For: Repair Technology Research Department /EDVD Feb.2004Dokument178 SeitenService Manual For: Repair Technology Research Department /EDVD Feb.2004naughtybigboyNoch keine Bewertungen
- ISS-102Dokument48 SeitenISS-102evasiveNoch keine Bewertungen
- Pic32 Maxi WebDokument21 SeitenPic32 Maxi Webmaroua_ngoura100% (1)
- GL811EDokument37 SeitenGL811EJuanpere2Noch keine Bewertungen
- DatasheetDokument13 SeitenDatasheetAshok GudivadaNoch keine Bewertungen
- Um GpsDokument7 SeitenUm GpsDNoch keine Bewertungen
- Piksi Datasheet v2.3.1Dokument4 SeitenPiksi Datasheet v2.3.1RacielMCNoch keine Bewertungen
- Ic 695 Cpu 315Dokument14 SeitenIc 695 Cpu 315Dilyalew DebreworkNoch keine Bewertungen
- Pixhack Manual PDFDokument8 SeitenPixhack Manual PDFCarlosEnriqueSuarezNavasNoch keine Bewertungen
- Release Notes MC75x6 OS02 35 01Dokument9 SeitenRelease Notes MC75x6 OS02 35 01Hatem ElbeziNoch keine Bewertungen
- Ec6711 Emb Lab PDFDokument92 SeitenEc6711 Emb Lab PDFAnonymous LXQnmsD100% (1)
- Bus Tracking Using Gps & GSM SystemDokument30 SeitenBus Tracking Using Gps & GSM SystemAnindya RoyNoch keine Bewertungen
- m220 Service ManualDokument49 Seitenm220 Service ManualDave SharpNoch keine Bewertungen
- 3-Phase Switched Reluctance (SR) Sensorless Motor Control Using A 56F80x, 56F8100 or 56F8300 DeviceDokument64 Seiten3-Phase Switched Reluctance (SR) Sensorless Motor Control Using A 56F80x, 56F8100 or 56F8300 DevicekarthicgroupNoch keine Bewertungen
- Riccar R1950/R2050 Sewing Machine Instruction ManualDokument44 SeitenRiccar R1950/R2050 Sewing Machine Instruction ManualiliiexpugnansNoch keine Bewertungen
- 76xxx Processor Datasheet PDFDokument10 Seiten76xxx Processor Datasheet PDFan nguyenNoch keine Bewertungen
- Programming For Problem Solving KCS 101 2 PDFDokument2 SeitenProgramming For Problem Solving KCS 101 2 PDFavinas_3marNoch keine Bewertungen
- Diagnosis of Power Transformer Faults Based On Five Fuzzy Ratio MethodDokument12 SeitenDiagnosis of Power Transformer Faults Based On Five Fuzzy Ratio MethodJeffrey RamosNoch keine Bewertungen
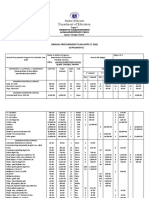
- ANNUAL PROCUREMENT PLAN - APP SupplementalDokument5 SeitenANNUAL PROCUREMENT PLAN - APP SupplementalCarlota Tejero100% (3)
- Spring Boot TutorialDokument34 SeitenSpring Boot TutorialrammohanshastryNoch keine Bewertungen
- Efficient Estimation of Word Representations in Vector Space - Meghana BDokument2 SeitenEfficient Estimation of Word Representations in Vector Space - Meghana BMeghana BezawadaNoch keine Bewertungen
- William Stallings Computer Organization and Architecture 8 Edition Computer ArithmeticDokument26 SeitenWilliam Stallings Computer Organization and Architecture 8 Edition Computer ArithmeticAqib abdullahNoch keine Bewertungen
- Bottom Up Parsing: Session 14-15-16Dokument28 SeitenBottom Up Parsing: Session 14-15-16Rifky PratamaNoch keine Bewertungen
- Smart Municipal Water ReleaseDokument11 SeitenSmart Municipal Water ReleaseSuddharth AgrawalNoch keine Bewertungen
- Fluke 99BDokument14 SeitenFluke 99BguillermoNoch keine Bewertungen
- Virtual Keyboard Without Keys and BoardDokument13 SeitenVirtual Keyboard Without Keys and Boardmahera KhatoonNoch keine Bewertungen
- Group Report FinalDokument63 SeitenGroup Report FinalMH YousufNoch keine Bewertungen
- Vizion 380 Installation ManualDokument20 SeitenVizion 380 Installation ManualMarcos PauloNoch keine Bewertungen
- (Lab-02l) Writing Generic Methods and ClassesDokument10 Seiten(Lab-02l) Writing Generic Methods and ClassesArvab NadeemNoch keine Bewertungen
- Integrated Radar Sensing and Communications BookDokument609 SeitenIntegrated Radar Sensing and Communications BookDr-Mohammed RihanNoch keine Bewertungen
- SLR16 (AS & A) - Computer Related LegislationDokument2 SeitenSLR16 (AS & A) - Computer Related LegislationZakNoch keine Bewertungen
- AutoCad 2018Dokument13 SeitenAutoCad 2018Indrawan BaskaraNoch keine Bewertungen
- Unit 3 Input Devices: Kompetensi DasarDokument4 SeitenUnit 3 Input Devices: Kompetensi DasarKhoirul zikriNoch keine Bewertungen
- Quick Start Guide: Before You BeginDokument13 SeitenQuick Start Guide: Before You Beginfrinsa noroesteNoch keine Bewertungen
- Aimsun Users Manual v6.1Dokument312 SeitenAimsun Users Manual v6.1nomorebluesNoch keine Bewertungen
- The Effect of Icon Spacing and Size On The Speed of Icon Processing in The Human Visual SystemDokument10 SeitenThe Effect of Icon Spacing and Size On The Speed of Icon Processing in The Human Visual SystemHarverNoch keine Bewertungen
- Zoom Setup InstructionsDokument5 SeitenZoom Setup InstructionsoNoch keine Bewertungen
- Spectrum Archive VMDokument83 SeitenSpectrum Archive VMMahendraNoch keine Bewertungen
- Research Paper Using SpssDokument9 SeitenResearch Paper Using Spssfyrqkxfq100% (1)
- Please Use Python Programming 3.6. Write A Program...Dokument2 SeitenPlease Use Python Programming 3.6. Write A Program...viliame vuetibauNoch keine Bewertungen
- Strings NotesDokument28 SeitenStrings NotesSowjanya BalagaNoch keine Bewertungen
- Rakshit Tyagi - CVDokument1 SeiteRakshit Tyagi - CVshubham.arivihanNoch keine Bewertungen
- Web Results: Tinapay NG Buhay (Mga Bagong Awiting Pangmisa) - JOOXDokument7 SeitenWeb Results: Tinapay NG Buhay (Mga Bagong Awiting Pangmisa) - JOOXKitNoch keine Bewertungen
- Important Information On Final Examinations June - December 2020 V1.1Dokument3 SeitenImportant Information On Final Examinations June - December 2020 V1.1Harry PotterNoch keine Bewertungen
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaVon EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNoch keine Bewertungen
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseVon EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseBewertung: 4.5 von 5 Sternen4.5/5 (50)
- The Fabric of Civilization: How Textiles Made the WorldVon EverandThe Fabric of Civilization: How Textiles Made the WorldBewertung: 4.5 von 5 Sternen4.5/5 (57)
- Sully: The Untold Story Behind the Miracle on the HudsonVon EverandSully: The Untold Story Behind the Miracle on the HudsonBewertung: 4 von 5 Sternen4/5 (103)
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationVon EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationBewertung: 4.5 von 5 Sternen4.5/5 (46)
- A Place of My Own: The Architecture of DaydreamsVon EverandA Place of My Own: The Architecture of DaydreamsBewertung: 4 von 5 Sternen4/5 (241)
- Pale Blue Dot: A Vision of the Human Future in SpaceVon EverandPale Blue Dot: A Vision of the Human Future in SpaceBewertung: 4.5 von 5 Sternen4.5/5 (586)
- Highest Duty: My Search for What Really MattersVon EverandHighest Duty: My Search for What Really MattersNoch keine Bewertungen
- The Weather Machine: A Journey Inside the ForecastVon EverandThe Weather Machine: A Journey Inside the ForecastBewertung: 3.5 von 5 Sternen3.5/5 (31)
- Transformed: Moving to the Product Operating ModelVon EverandTransformed: Moving to the Product Operating ModelBewertung: 4 von 5 Sternen4/5 (1)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestVon EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestBewertung: 4 von 5 Sternen4/5 (28)
- 35 Miles From Shore: The Ditching and Rescue of ALM Flight 980Von Everand35 Miles From Shore: The Ditching and Rescue of ALM Flight 980Bewertung: 4 von 5 Sternen4/5 (21)
- The Future of Geography: How the Competition in Space Will Change Our WorldVon EverandThe Future of Geography: How the Competition in Space Will Change Our WorldBewertung: 4.5 von 5 Sternen4.5/5 (4)
- A Garden of Marvels: How We Discovered that Flowers Have Sex, Leaves Eat Air, and Other Secrets of PlantsVon EverandA Garden of Marvels: How We Discovered that Flowers Have Sex, Leaves Eat Air, and Other Secrets of PlantsNoch keine Bewertungen
- Recording Unhinged: Creative and Unconventional Music Recording TechniquesVon EverandRecording Unhinged: Creative and Unconventional Music Recording TechniquesNoch keine Bewertungen
- Data-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseVon EverandData-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseBewertung: 3.5 von 5 Sternen3.5/5 (12)
- The End of Craving: Recovering the Lost Wisdom of Eating WellVon EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellBewertung: 4.5 von 5 Sternen4.5/5 (80)
- Packing for Mars: The Curious Science of Life in the VoidVon EverandPacking for Mars: The Curious Science of Life in the VoidBewertung: 4 von 5 Sternen4/5 (1395)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureVon EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureBewertung: 5 von 5 Sternen5/5 (124)
- Across the Airless Wilds: The Lunar Rover and the Triumph of the Final Moon LandingsVon EverandAcross the Airless Wilds: The Lunar Rover and the Triumph of the Final Moon LandingsNoch keine Bewertungen
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindVon EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNoch keine Bewertungen
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansVon EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansNoch keine Bewertungen
- Reality+: Virtual Worlds and the Problems of PhilosophyVon EverandReality+: Virtual Worlds and the Problems of PhilosophyBewertung: 4 von 5 Sternen4/5 (24)
- Artificial Intelligence: A Guide for Thinking HumansVon EverandArtificial Intelligence: A Guide for Thinking HumansBewertung: 4.5 von 5 Sternen4.5/5 (30)
- Broken Money: Why Our Financial System is Failing Us and How We Can Make it BetterVon EverandBroken Money: Why Our Financial System is Failing Us and How We Can Make it BetterBewertung: 5 von 5 Sternen5/5 (3)