Das könnte Ihnen auch gefallen
- Brain-Computer Interfacing for Assistive Robotics: Electroencephalograms, Recurrent Quantum Neural Networks, and User-Centric Graphical InterfacesVon EverandBrain-Computer Interfacing for Assistive Robotics: Electroencephalograms, Recurrent Quantum Neural Networks, and User-Centric Graphical InterfacesBewertung: 5 von 5 Sternen5/5 (2)
- Digital Signal Processing: Instant AccessVon EverandDigital Signal Processing: Instant AccessBewertung: 3.5 von 5 Sternen3.5/5 (2)
- ABCs of Modulation Domain Analysis AN01 201 Rev3Dokument4 SeitenABCs of Modulation Domain Analysis AN01 201 Rev3erdemsecenNoch keine Bewertungen
- vlsi paperDokument5 Seitenvlsi paperkegonif419Noch keine Bewertungen
- Speed Measurement Algorithms For Low-Resolution Incremental Encoder Equipped Drives: A Comparative AnalysisDokument9 SeitenSpeed Measurement Algorithms For Low-Resolution Incremental Encoder Equipped Drives: A Comparative AnalysisHien MyNoch keine Bewertungen
- Research Inventy: International Journal of Engineering and ScienceDokument10 SeitenResearch Inventy: International Journal of Engineering and ScienceresearchinventyNoch keine Bewertungen
- Microprocessor Based Digital PID Controller For Speed Control of D.C. MotorDokument6 SeitenMicroprocessor Based Digital PID Controller For Speed Control of D.C. MotorSwapnica GarreNoch keine Bewertungen
- Temperature Measurement CircuitsDokument22 SeitenTemperature Measurement Circuitsestraj1954Noch keine Bewertungen
- DC Motor System Identification and Speed Control Using dSPACE ToolsDokument14 SeitenDC Motor System Identification and Speed Control Using dSPACE ToolsIhab BenayacheNoch keine Bewertungen
- Automated Measurement of Frequency Response of Electrical Networks Filters and AmplifiersDokument7 SeitenAutomated Measurement of Frequency Response of Electrical Networks Filters and AmplifiersDiscrete ComponentNoch keine Bewertungen
- Digital TachometerDokument5 SeitenDigital TachometerSARATH SASINoch keine Bewertungen
- Ch8 VIDokument42 SeitenCh8 VIAdhiraj C ChoudharyNoch keine Bewertungen
- DESIGN AND IMPLEMENTATION OF SYNCHRONOUS 4-BIT UP COUNTERDokument38 SeitenDESIGN AND IMPLEMENTATION OF SYNCHRONOUS 4-BIT UP COUNTERManojkumar KalyanapuNoch keine Bewertungen
- 245915-FinalDokument13 Seiten245915-FinalUtkarsh PrakashNoch keine Bewertungen
- All Digital Timing Recovery and FPGA Implementation: Daniel Cárdenas, Germán ArévaloDokument6 SeitenAll Digital Timing Recovery and FPGA Implementation: Daniel Cárdenas, Germán Arévalom0hmdNoch keine Bewertungen
- A_CMOS_PWM_Transceiver_Using_Self-Referenced_Edge_DetectionDokument5 SeitenA_CMOS_PWM_Transceiver_Using_Self-Referenced_Edge_Detectionkegonif419Noch keine Bewertungen
- Engine Status Monitoring System Using Real Time Clock (ds1307)Dokument4 SeitenEngine Status Monitoring System Using Real Time Clock (ds1307)International Journal of computational Engineering research (IJCER)Noch keine Bewertungen
- Introduction to Digital Control SystemsDokument70 SeitenIntroduction to Digital Control SystemsAmruth Thelkar67% (3)
- IOT Based Low Cost Blood Pressure Monitoring System Using LPC 2148Dokument16 SeitenIOT Based Low Cost Blood Pressure Monitoring System Using LPC 2148Pratima ChavanNoch keine Bewertungen
- The Nanokernel: David L. Mills University of Delaware and Poul-Henning Kamp Freebsd ProjectDokument8 SeitenThe Nanokernel: David L. Mills University of Delaware and Poul-Henning Kamp Freebsd Projectjunep42Noch keine Bewertungen
- Design of Handheld Oscilloscope Based On FPGA and Dual A/D: Hu Yang, Yuduo WangDokument7 SeitenDesign of Handheld Oscilloscope Based On FPGA and Dual A/D: Hu Yang, Yuduo Wangjayesh chauhanNoch keine Bewertungen
- A PID Controller For Real-Time DC Motor Speed Control Using The C505C Micro ControllerDokument6 SeitenA PID Controller For Real-Time DC Motor Speed Control Using The C505C Micro Controllerbhargav103Noch keine Bewertungen
- Digital Speedometer Using FPGADokument4 SeitenDigital Speedometer Using FPGAauike87Noch keine Bewertungen
- The Development of The Digital Oscilloscope Based On FPGA PDFDokument8 SeitenThe Development of The Digital Oscilloscope Based On FPGA PDFivy_publisherNoch keine Bewertungen
- Chapter 2 Discrete Data Control SystemsDokument78 SeitenChapter 2 Discrete Data Control SystemsAmruth ThelkarNoch keine Bewertungen
- Design and Verification of LC3 MicrocontrollerDokument9 SeitenDesign and Verification of LC3 MicrocontrollerIJRASETPublicationsNoch keine Bewertungen
- Low Cost LCD Frequency MeterDokument54 SeitenLow Cost LCD Frequency MeterSumit AgarwalNoch keine Bewertungen
- Robust and Low-Cost Proximity Sensor For Line Detection Robot Using Goertzel AlgorithmDokument4 SeitenRobust and Low-Cost Proximity Sensor For Line Detection Robot Using Goertzel AlgorithmGuillem Cabo PitarchNoch keine Bewertungen
- F06050303040 PDFDokument11 SeitenF06050303040 PDFAbderrahim ZahriNoch keine Bewertungen
- Error Modeling and Improved Position Estimation For Optical Incremental Encoders by Means of Time StampingDokument7 SeitenError Modeling and Improved Position Estimation For Optical Incremental Encoders by Means of Time StampingHien MyNoch keine Bewertungen
- Digital Clock Frequency Multiplier Using Floating Point ArithmeticDokument4 SeitenDigital Clock Frequency Multiplier Using Floating Point ArithmeticIJERDNoch keine Bewertungen
- Multichannel Data Acquisition SystemDokument11 SeitenMultichannel Data Acquisition SystemIJRASETPublicationsNoch keine Bewertungen
- Design of A Low-Cost Contact-Less Digital - Like PDFDokument3 SeitenDesign of A Low-Cost Contact-Less Digital - Like PDFMed MaxNoch keine Bewertungen
- Touch Screen and Accelerometer Based Wireless Motor Speed and Direction Controlling System Using ArduinoDokument4 SeitenTouch Screen and Accelerometer Based Wireless Motor Speed and Direction Controlling System Using ArduinoseventhsensegroupNoch keine Bewertungen
- Itu-T: Coding of Speech at 8 Kbit/S Using Conjugate-Structure Algebraic-Code-Excited Linear-Prediction (Cs-Acelp)Dokument39 SeitenItu-T: Coding of Speech at 8 Kbit/S Using Conjugate-Structure Algebraic-Code-Excited Linear-Prediction (Cs-Acelp)Jamil AhmadNoch keine Bewertungen
- Optimization and Implementation of The Wavelet Based Algorithms For Embedded Biomedical Signal ProcessingDokument21 SeitenOptimization and Implementation of The Wavelet Based Algorithms For Embedded Biomedical Signal ProcessingMalu MohanNoch keine Bewertungen
- Fundamentals of Microwave Frequency Counters: Application Note 200-1Dokument20 SeitenFundamentals of Microwave Frequency Counters: Application Note 200-1Darshan PatelNoch keine Bewertungen
- Heart Beat Monitoring SystemDokument17 SeitenHeart Beat Monitoring Systemvinod_patil4607100% (1)
- 3D Microfabrication and Imaging with LabVIEWDokument3 Seiten3D Microfabrication and Imaging with LabVIEWcprabhakaranNoch keine Bewertungen
- Study DSO Front Panel & Measure FunctionsDokument17 SeitenStudy DSO Front Panel & Measure FunctionsMahadevNoch keine Bewertungen
- Digital contactless tachometer B. Tech projectDokument33 SeitenDigital contactless tachometer B. Tech projectkanjisarathNoch keine Bewertungen
- Wireless Speed Control of DC Motor Using PWM and UARTDokument3 SeitenWireless Speed Control of DC Motor Using PWM and UARTElins Journal100% (1)
- Design and Implementation of Viterbi Decoder Using VHDL: IOP Conference Series: Materials Science and EngineeringDokument7 SeitenDesign and Implementation of Viterbi Decoder Using VHDL: IOP Conference Series: Materials Science and Engineeringkrishna mohan pandeyNoch keine Bewertungen
- Frequency CounterDokument23 SeitenFrequency CounterEng. Dr. Dennis N Mwighusa100% (2)
- Wireless Polling Method Using RFDokument101 SeitenWireless Polling Method Using RFSravani SravzNoch keine Bewertungen
- Speed Control of Single Phase Induction Motor Using Infrared Receiver ModuleDokument6 SeitenSpeed Control of Single Phase Induction Motor Using Infrared Receiver ModuleSanjay ShelarNoch keine Bewertungen
- VLSI Design: A Basic RISC ProcessorDokument54 SeitenVLSI Design: A Basic RISC Processorhcg0206Noch keine Bewertungen
- Three Phase SCR Power Converter Controlled by MicrocontrollerDokument8 SeitenThree Phase SCR Power Converter Controlled by MicrocontrollerIsmael Ochoa JimenezNoch keine Bewertungen
- Volume 3 - Number 1 - Tools For Microwave Radio Communications System DesignDokument13 SeitenVolume 3 - Number 1 - Tools For Microwave Radio Communications System DesignArter AlayNoch keine Bewertungen
- CDC by Ajaysimha - VlsiDokument14 SeitenCDC by Ajaysimha - VlsiPriyanka GollapallyNoch keine Bewertungen
- An Efficient Differential Conditional Capturing Energy Recovery Flip-Flop DesignDokument6 SeitenAn Efficient Differential Conditional Capturing Energy Recovery Flip-Flop DesignRaghul RamasamyNoch keine Bewertungen
- BLDC Sinusoidal ControlDokument6 SeitenBLDC Sinusoidal ControlOctavian MîrţiNoch keine Bewertungen
- Microelectronics and Computer Systems Laboratory, Mcgill University 3480 University Street, Montreal, Quebec, Canada H3A 2A7Dokument10 SeitenMicroelectronics and Computer Systems Laboratory, Mcgill University 3480 University Street, Montreal, Quebec, Canada H3A 2A7Ahmed AliNoch keine Bewertungen
- Measuring Motor Speed with a Contactless Digital Tachometer Using 8051 MicrocontrollerDokument12 SeitenMeasuring Motor Speed with a Contactless Digital Tachometer Using 8051 MicrocontrollerHariniNoch keine Bewertungen
- An Improved Analog Waveforms Generation Technique Using Direct Digital SynthesizerDokument4 SeitenAn Improved Analog Waveforms Generation Technique Using Direct Digital SynthesizerezanaNoch keine Bewertungen
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsVon EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNoch keine Bewertungen
- Software Radio: Sampling Rate Selection, Design and SynchronizationVon EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationNoch keine Bewertungen
- Easypic SchematicsDokument3 SeitenEasypic Schematicsng_viet_cuong_groupNoch keine Bewertungen
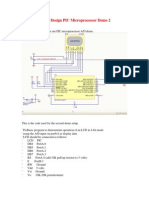
- Junior Design PIC Microprocessor Demo 2Dokument2 SeitenJunior Design PIC Microprocessor Demo 2ng_viet_cuong_groupNoch keine Bewertungen
- RC Servo Wire Color Code ChartDokument1 SeiteRC Servo Wire Color Code Chartng_viet_cuong_groupNoch keine Bewertungen
- Um Mxr-22-b en VerabDokument29 SeitenUm Mxr-22-b en Verabng_viet_cuong_groupNoch keine Bewertungen
- PLC Solution BookDokument49 SeitenPLC Solution BookJagadeesh Rajamanickam71% (14)
- DC ElectrofisherDokument4 SeitenDC Electrofisherng_viet_cuong_groupNoch keine Bewertungen
- X'merDokument13 SeitenX'mervatsalNoch keine Bewertungen
- PLC Purdy March2011 PDFDokument12 SeitenPLC Purdy March2011 PDFng_viet_cuong_groupNoch keine Bewertungen
- Smart Sensors Laser Displacement Sensors CMOS TypeDokument8 SeitenSmart Sensors Laser Displacement Sensors CMOS Typeng_viet_cuong_groupNoch keine Bewertungen
- ElectronicsDokument36 SeitenElectronicsolivirus1007Noch keine Bewertungen
- Cmt2 Reading Spr12Dokument4 SeitenCmt2 Reading Spr12ng_viet_cuong_groupNoch keine Bewertungen
- LAB-X1 SchematicDokument2 SeitenLAB-X1 SchematicRenato MirandaNoch keine Bewertungen
- Cac Khai Niem Co Ban Ve DienDokument8 SeitenCac Khai Niem Co Ban Ve Dienninhnn83Noch keine Bewertungen
- Special Purpose Basic SwitchDokument5 SeitenSpecial Purpose Basic Switchng_viet_cuong_groupNoch keine Bewertungen
- Compact Photoelectric SensorDokument20 SeitenCompact Photoelectric Sensorng_viet_cuong_groupNoch keine Bewertungen
- General Purpose RelayDokument16 SeitenGeneral Purpose Relayng_viet_cuong_groupNoch keine Bewertungen
- De 1 - Concise for Vietnamese Language School Exam DocumentDokument6 SeitenDe 1 - Concise for Vietnamese Language School Exam Documentng_viet_cuong_groupNoch keine Bewertungen
- Emergency Stop Switch (16-Dia)Dokument10 SeitenEmergency Stop Switch (16-Dia)ng_viet_cuong_groupNoch keine Bewertungen
- EDS10 73dDokument8 SeitenEDS10 73dng_viet_cuong_groupNoch keine Bewertungen
- Two Circuit Limit Switch Long LifeDokument43 SeitenTwo Circuit Limit Switch Long Lifeng_viet_cuong_groupNoch keine Bewertungen
- cmt1 Sampleques BookbDokument25 Seitencmt1 Sampleques Bookbng_viet_cuong_groupNoch keine Bewertungen
- OrCad TutorialDokument62 SeitenOrCad Tutorialng_viet_cuong_groupNoch keine Bewertungen
- De 1 - Concise for Vietnamese Language School Exam DocumentDokument6 SeitenDe 1 - Concise for Vietnamese Language School Exam Documentng_viet_cuong_groupNoch keine Bewertungen
- OrCad TutorialDokument62 SeitenOrCad Tutorialng_viet_cuong_groupNoch keine Bewertungen
- Clearing House Currency Delivery Processing ProceduresDokument10 SeitenClearing House Currency Delivery Processing Proceduresng_viet_cuong_groupNoch keine Bewertungen
- The Feds Bank Regulation ChallengesDokument2 SeitenThe Feds Bank Regulation Challengesng_viet_cuong_groupNoch keine Bewertungen
- MCP3909 3-Phase Energy Meter Reference DesignDokument88 SeitenMCP3909 3-Phase Energy Meter Reference Designng_viet_cuong_groupNoch keine Bewertungen
- Exercise On Preposition 5112Dokument2 SeitenExercise On Preposition 5112ng_viet_cuong_groupNoch keine Bewertungen
- 70 Test B 8955Dokument503 Seiten70 Test B 8955ng_viet_cuong_groupNoch keine Bewertungen
- GM Doorlock Module InstallationDokument1 SeiteGM Doorlock Module InstallationAliNoch keine Bewertungen
- Unsteady Wave Structure Near Separation in A Mach 5 Compression Ramp InteractionDokument8 SeitenUnsteady Wave Structure Near Separation in A Mach 5 Compression Ramp Interaction王崇岳Noch keine Bewertungen
- Sigma DeltaDokument4 SeitenSigma DeltaSreerag Kunnathu SugathanNoch keine Bewertungen
- Operation Manual: Model: DS-530Dokument8 SeitenOperation Manual: Model: DS-530Jorge Tovar ValenciaNoch keine Bewertungen
- Wireless Robot and Robotic Arm Control With Accelerometer Sensor ProjectDokument41 SeitenWireless Robot and Robotic Arm Control With Accelerometer Sensor ProjectAmandeep Singh KheraNoch keine Bewertungen
- WM8944B v4.3Dokument165 SeitenWM8944B v4.3djebinNoch keine Bewertungen
- Bhoj Reddy Engineering College For Women: Microwave and Digital Communications Laboratory ManualDokument52 SeitenBhoj Reddy Engineering College For Women: Microwave and Digital Communications Laboratory Manuallakshmipriya94Noch keine Bewertungen
- Development and Implementation of Real-Time Flex Sensor Based Prosthetic HandDokument74 SeitenDevelopment and Implementation of Real-Time Flex Sensor Based Prosthetic HandRachitha RNoch keine Bewertungen
- TFT Touch Ration Packing ControllerDokument32 SeitenTFT Touch Ration Packing ControllerMuhammad SufyanNoch keine Bewertungen
- NEC Level 1 Training PresentationDokument66 SeitenNEC Level 1 Training Presentationnikhom_dk1565Noch keine Bewertungen
- Digital Control Systems 4Dokument451 SeitenDigital Control Systems 4doğancan100% (4)
- MPMC QB ANS 3 0 (Both QB)Dokument65 SeitenMPMC QB ANS 3 0 (Both QB)Gangadhar JenaNoch keine Bewertungen
- Structured Compressed Sensing: From Theory To ApplicationsDokument60 SeitenStructured Compressed Sensing: From Theory To ApplicationsGilbertNoch keine Bewertungen
- Generation A PWM Signal Modulated by An Analog InputDokument19 SeitenGeneration A PWM Signal Modulated by An Analog InputHelbert A López ANoch keine Bewertungen
- IRG4BC20KD DatasheetDokument11 SeitenIRG4BC20KD DatasheetjoaomimaNoch keine Bewertungen
- Real-Time Control and Signal Processing ExamplesDokument25 SeitenReal-Time Control and Signal Processing ExamplesMano KaranNoch keine Bewertungen
- MCP3204 MCP3208 PDFDokument20 SeitenMCP3204 MCP3208 PDFCarlos PosadaNoch keine Bewertungen
- Chapter 6 - Automated & Emerging TechnologiesDokument67 SeitenChapter 6 - Automated & Emerging Technologiesasheralt3791Noch keine Bewertungen
- Introduction to Digital Signal ProcessingDokument77 SeitenIntroduction to Digital Signal Processingkarthik0433Noch keine Bewertungen
- Jordanov NIMA.345.337 1994Dokument9 SeitenJordanov NIMA.345.337 1994leendert_hayen7107Noch keine Bewertungen
- Principles of Sensing: Definition, Classification and Data AcquisitionDokument13 SeitenPrinciples of Sensing: Definition, Classification and Data AcquisitionvanithaNoch keine Bewertungen
- Datasheet 2243 Ti PDFDokument59 SeitenDatasheet 2243 Ti PDFahmadNoch keine Bewertungen
- How To Measure DC Current With A Microcontroller - Embedded LabDokument10 SeitenHow To Measure DC Current With A Microcontroller - Embedded LabJEOVADJNoch keine Bewertungen
- Remote Online Monitoring System For Suspension Insulator StringsDokument5 SeitenRemote Online Monitoring System For Suspension Insulator StringsluqmansulymanNoch keine Bewertungen
- Retrieving Fault Codes Fault Code Display: A B CD E A CDokument19 SeitenRetrieving Fault Codes Fault Code Display: A B CD E A CPabloMatiasC100% (2)
- Digital Distance Relay Modeling and Testing Using LabVIEW and MATLAB SimulinkDokument55 SeitenDigital Distance Relay Modeling and Testing Using LabVIEW and MATLAB SimulinkK Vijay Bhaskar ReddyNoch keine Bewertungen
- Introduction To Ultrasound: Sahana KrishnanDokument3 SeitenIntroduction To Ultrasound: Sahana Krishnankundu.banhimitraNoch keine Bewertungen