Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Chapter 08 HomeworkDokument40 SeitenChapter 08 HomeworkFatboy9146% (24)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- LBSC Steam CraneDokument7 SeitenLBSC Steam CraneSantiago Londoño LopezNoch keine Bewertungen
- UDOT Seismic Design Manual SectionDokument82 SeitenUDOT Seismic Design Manual Sectionyoungc71Noch keine Bewertungen
- Welding Consumable Storage and Handling ProceduresDokument27 SeitenWelding Consumable Storage and Handling ProceduresKannan MurugesanNoch keine Bewertungen
- Machine Installation - Shaft AlignmentDokument17 SeitenMachine Installation - Shaft AlignmentD.b. Tampubolon100% (1)
- Instrumentation Training for Engineers and TechniciansDokument9 SeitenInstrumentation Training for Engineers and TechniciansshareyhouNoch keine Bewertungen
- Marine Safety Management Plan SummaryDokument37 SeitenMarine Safety Management Plan Summarykhabiran100% (1)
- Aircon - Schedule of Maintenance ServiceDokument3 SeitenAircon - Schedule of Maintenance ServiceesagcojrNoch keine Bewertungen
- Manual For Experimental Water Cooling TowerDokument7 SeitenManual For Experimental Water Cooling TowerBalRam Dhiman100% (1)
- Valves and Actuators Catalog North America F 27855 7 PDFDokument444 SeitenValves and Actuators Catalog North America F 27855 7 PDFAlvaro YépezNoch keine Bewertungen
- BH Pneumatic Piston Vibrator Operation ManualDokument17 SeitenBH Pneumatic Piston Vibrator Operation ManualChristian Paul Salazar SanchezNoch keine Bewertungen
- Bleeding Xpi Fuel System Scania XTDokument3 SeitenBleeding Xpi Fuel System Scania XTsam the fool100% (2)
- Embragues para Motores EstacionariosDokument12 SeitenEmbragues para Motores EstacionariosJiyaYsqn100% (1)
- Quiz - Exercise - Mini-Case Instructions InstructionsDokument1 SeiteQuiz - Exercise - Mini-Case Instructions InstructionskhabiranNoch keine Bewertungen
- Dio 22b. Sprečavanje Onečišćenja - Izmjene Jan 2021Dokument5 SeitenDio 22b. Sprečavanje Onečišćenja - Izmjene Jan 2021Samo SpontanostNoch keine Bewertungen
- CapmDokument3 SeitenCapmkhabiranNoch keine Bewertungen
- Ocean Internet-of-Things // Networked Blue Economy: C-Accel Track RecommendationDokument12 SeitenOcean Internet-of-Things // Networked Blue Economy: C-Accel Track RecommendationkhabiranNoch keine Bewertungen
- No. F-14-AAA-0000Dokument9 SeitenNo. F-14-AAA-0000khabiranNoch keine Bewertungen
- Landmark Facility Solutions - QuestionsDokument1 SeiteLandmark Facility Solutions - QuestionsFaig0% (1)
- DavorinDujmovic PaperDavorinDujmovicDokument10 SeitenDavorinDujmovic PaperDavorinDujmovickhabiranNoch keine Bewertungen
- Customer Value Chain Analysis For Sustainable Reverse Logistics Implementation: Indonesian Mobile Phone IndustryDokument4 SeitenCustomer Value Chain Analysis For Sustainable Reverse Logistics Implementation: Indonesian Mobile Phone IndustrykhabiranNoch keine Bewertungen
- Review of Charterer and Owner Relationship PDFDokument15 SeitenReview of Charterer and Owner Relationship PDFShanti Prakhar AwasthiNoch keine Bewertungen
- HjlinjftsaiDokument13 SeitenHjlinjftsaikhabiranNoch keine Bewertungen
- Overview of Health, Safety and Environmental Regulation Relating To The Offshore Oil and Gas IndustryDokument16 SeitenOverview of Health, Safety and Environmental Regulation Relating To The Offshore Oil and Gas IndustrykhabiranNoch keine Bewertungen
- United Nations Industrial Development Organization: Single Workstation - Comfar Iii ExpertDokument1 SeiteUnited Nations Industrial Development Organization: Single Workstation - Comfar Iii ExpertkhabiranNoch keine Bewertungen
- Customer Value Chain Analysis For Sustainable Reverse Logistics Implementation: Indonesian Mobile Phone IndustryDokument4 SeitenCustomer Value Chain Analysis For Sustainable Reverse Logistics Implementation: Indonesian Mobile Phone IndustrykhabiranNoch keine Bewertungen
- ICS Rules & Regulations and GuidanceDokument2 SeitenICS Rules & Regulations and GuidancekhabiranNoch keine Bewertungen
- Shell Corrosion Allowance For Aboveground Storage Tanks: Debra Tetteh-Wayoe, P.EngDokument8 SeitenShell Corrosion Allowance For Aboveground Storage Tanks: Debra Tetteh-Wayoe, P.Engkhabiran100% (1)
- 20120710ATT48612EN OriginalDokument16 Seiten20120710ATT48612EN OriginalkhabiranNoch keine Bewertungen
- Project Management & Engineering Services To The Submarine Power Cable MarketDokument2 SeitenProject Management & Engineering Services To The Submarine Power Cable MarketkhabiranNoch keine Bewertungen
- Service Note: ABB Solar Inverter Life Cycle ManagementDokument2 SeitenService Note: ABB Solar Inverter Life Cycle ManagementkhabiranNoch keine Bewertungen
- Numerical Simulation of Fluid Added Mass Effect On A Kaplan Turbine Runner With Experimental ValidationDokument9 SeitenNumerical Simulation of Fluid Added Mass Effect On A Kaplan Turbine Runner With Experimental ValidationkhabiranNoch keine Bewertungen
- A Brief Review On Ndt&E Methods For Structural Aircraft ComponentsDokument9 SeitenA Brief Review On Ndt&E Methods For Structural Aircraft ComponentskhabiranNoch keine Bewertungen
- Innovatum Tone GeneratorDokument8 SeitenInnovatum Tone GeneratorGleison PrateadoNoch keine Bewertungen
- DNV GL Adv DP Verfication BC 3 2017Dokument1 SeiteDNV GL Adv DP Verfication BC 3 2017khabiranNoch keine Bewertungen
- A Brief Review On Ndt&E Methods For Structural Aircraft ComponentsDokument9 SeitenA Brief Review On Ndt&E Methods For Structural Aircraft ComponentskhabiranNoch keine Bewertungen
- Shell Corrosion Allowance For Aboveground Storage Tanks: Debra Tetteh-Wayoe, P.EngDokument8 SeitenShell Corrosion Allowance For Aboveground Storage Tanks: Debra Tetteh-Wayoe, P.Engkhabiran100% (1)
- Nonlinear Analysis of Offshore Structures: Bjo RN Skallerud Jo Rgen AmdahlDokument1 SeiteNonlinear Analysis of Offshore Structures: Bjo RN Skallerud Jo Rgen AmdahlkhabiranNoch keine Bewertungen
- Orcaflex Standard Training Course Syllabus: Line TypesDokument3 SeitenOrcaflex Standard Training Course Syllabus: Line TypeskhabiranNoch keine Bewertungen
- Smallseotools 1617464053Dokument1 SeiteSmallseotools 1617464053khabiranNoch keine Bewertungen
- On Design, Modelling, and Analysis of A 10-MW Medium-Speed Drivetrain For Offshore Wind TurbinesDokument1 SeiteOn Design, Modelling, and Analysis of A 10-MW Medium-Speed Drivetrain For Offshore Wind TurbineskhabiranNoch keine Bewertungen
- Fuel consumption rates for generator sets by KVA capacityDokument1 SeiteFuel consumption rates for generator sets by KVA capacitykhabiranNoch keine Bewertungen
- Gate Flight Mechanics by VayushastraDokument36 SeitenGate Flight Mechanics by Vayushastraudaykumar100% (4)
- Logan Clutch Catalog SAE Direct Drive PTODokument30 SeitenLogan Clutch Catalog SAE Direct Drive PTOnksiavashNoch keine Bewertungen
- Screw Air Compressors: SCR Belt DriveDokument2 SeitenScrew Air Compressors: SCR Belt DriveDelwin Jose HernandezNoch keine Bewertungen
- 2-Convective Mass-Transfer-E7240 PDFDokument49 Seiten2-Convective Mass-Transfer-E7240 PDFHasieb Alam KhanNoch keine Bewertungen
- Seminar ON Water Jet Cutting: Raj Kumar Goel Institute of TechnologyDokument17 SeitenSeminar ON Water Jet Cutting: Raj Kumar Goel Institute of TechnologyRahul kumarNoch keine Bewertungen
- Gupta Et Al-2016-Quality and Reliability Engineering InternationalDokument10 SeitenGupta Et Al-2016-Quality and Reliability Engineering InternationalEli PaleNoch keine Bewertungen
- Assignment 1Dokument2 SeitenAssignment 1Fizz MartinNoch keine Bewertungen
- NUST Machine Design Lecture on Stress, Strength and UncertaintyDokument19 SeitenNUST Machine Design Lecture on Stress, Strength and UncertaintyMuhammad Zun Nooren BangashNoch keine Bewertungen
- Simulate Piccolo Tube Anti-Icing System with CFDDokument7 SeitenSimulate Piccolo Tube Anti-Icing System with CFDsanjoshi21Noch keine Bewertungen
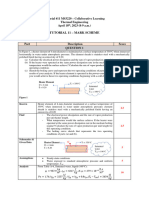
- Tutorial 11 - MS3220 Rekayasa Termal (Mark Scheme)Dokument6 SeitenTutorial 11 - MS3220 Rekayasa Termal (Mark Scheme)i need documentsNoch keine Bewertungen
- Arctic Cat 2008 DVX 50 Utility Service ManualDokument10 SeitenArctic Cat 2008 DVX 50 Utility Service Manualsergio100% (45)
- Vibratoin Severity - ISO 2372Dokument1 SeiteVibratoin Severity - ISO 2372HARSHANoch keine Bewertungen
- Manual Transmission and DifferentialDokument1 SeiteManual Transmission and DifferentialJeff PascoeNoch keine Bewertungen
- Air Changes Per HourDokument4 SeitenAir Changes Per HourDIPAK S100% (1)
- (20200922) Theo Doi AW RFQ 1-5Dokument29 Seiten(20200922) Theo Doi AW RFQ 1-5Tuấn PhạmNoch keine Bewertungen
- RCC 100 Important Questions 39Dokument33 SeitenRCC 100 Important Questions 39Engr Mehdi BugtiNoch keine Bewertungen
- Serial Number RangeDokument304 SeitenSerial Number RangeBracamonte Varon100% (1)
- Manual Junta Giratoria Serie 3000 OPW PDFDokument4 SeitenManual Junta Giratoria Serie 3000 OPW PDFDarwin Newton TacoraNoch keine Bewertungen