Das könnte Ihnen auch gefallen
- Diseño de Barda Por Viento y SismoDokument9 SeitenDiseño de Barda Por Viento y SismoEdwin Zurita100% (2)
- Sexo en Dos MundosDokument170 SeitenSexo en Dos MundosFrancisco Alberto Aguilar MadridNoch keine Bewertungen
- Introducción a FORTRANDokument34 SeitenIntroducción a FORTRANOscar ßgNoch keine Bewertungen
- Derivadas ParcialesDokument195 SeitenDerivadas ParcialesJuan Francisco Javier Sepúlveda Vergara100% (3)
- E3-Plus Resolución FallaDokument6 SeitenE3-Plus Resolución Falladanielizarra12480Noch keine Bewertungen
- El Nuevo Teatro Documento en Uruguay Argentina ChileDokument14 SeitenEl Nuevo Teatro Documento en Uruguay Argentina ChileGastón BorgesNoch keine Bewertungen
- Dialnet OptimizacionDeEnergiaEnSistemasDeBombeo 4391572Dokument12 SeitenDialnet OptimizacionDeEnergiaEnSistemasDeBombeo 4391572YuLu VaMaNoch keine Bewertungen
- Barranquilla RegistraduriaDokument264 SeitenBarranquilla RegistraduriaCarlosMarioGonzalezNoch keine Bewertungen
- Los Caminos de La VidaDokument5 SeitenLos Caminos de La VidaCarlosMarioGonzalezNoch keine Bewertungen
- Guias para Generar Kamas en DofusDokument3 SeitenGuias para Generar Kamas en DofusCarlosMarioGonzalezNoch keine Bewertungen
- Agro IndustrialDokument3 SeitenAgro IndustrialCarlosMarioGonzalezNoch keine Bewertungen
- Propiedades Del Natural GasDokument4 SeitenPropiedades Del Natural GasCarlosMarioGonzalezNoch keine Bewertungen
- IndustrialDokument2 SeitenIndustrialCarlosMarioGonzalezNoch keine Bewertungen
- IndustrialDokument2 SeitenIndustrialCarlosMarioGonzalezNoch keine Bewertungen
- La CelulaDokument4 SeitenLa CelulaCarlosMarioGonzalezNoch keine Bewertungen
- IndustrialDokument1 SeiteIndustrialCarlosMarioGonzalezNoch keine Bewertungen
- Poder MetricoDokument4 SeitenPoder MetricoCarlosMarioGonzalezNoch keine Bewertungen
- Analisis Estadistico de Una Caida de PresionDokument25 SeitenAnalisis Estadistico de Una Caida de PresionCarlosMarioGonzalezNoch keine Bewertungen
- Horario Sala Om #1Dokument2 SeitenHorario Sala Om #1CarlosMarioGonzalezNoch keine Bewertungen
- Reglamentacio - N Opciones de Grado - FDokument19 SeitenReglamentacio - N Opciones de Grado - FNaferMrtnzMNoch keine Bewertungen
- Explotacion Del GasDokument45 SeitenExplotacion Del GasYamilito GarnicaNoch keine Bewertungen
- 1165 3128 1 PB PDFDokument8 Seiten1165 3128 1 PB PDFCarlosMarioGonzalezNoch keine Bewertungen
- Informe FinalDokument1 SeiteInforme FinalCarlosMarioGonzalezNoch keine Bewertungen
- Termodinamica 2Dokument20 SeitenTermodinamica 2CarlosMarioGonzalezNoch keine Bewertungen
- FiltracionDokument9 SeitenFiltracionpaolatenjohNoch keine Bewertungen
- Material EsDokument2 SeitenMaterial EsCarlosMarioGonzalezNoch keine Bewertungen
- Formato Salida MaterialesDokument1 SeiteFormato Salida MaterialesCarlosMarioGonzalezNoch keine Bewertungen
- LinealizacionDokument4 SeitenLinealizacionCarlosMarioGonzalezNoch keine Bewertungen
- Fundamentos de La FiltracionDokument2 SeitenFundamentos de La FiltracionCarlosMarioGonzalezNoch keine Bewertungen
- GTH 7 13Dokument6 SeitenGTH 7 13CarlosMarioGonzalezNoch keine Bewertungen
- Preguntas GeneralesDokument10 SeitenPreguntas GeneralesCarlosMarioGonzalezNoch keine Bewertungen
- Informe FinalDokument1 SeiteInforme FinalCarlosMarioGonzalezNoch keine Bewertungen
- PsicoanaliticaDokument2 SeitenPsicoanalitica3 a 1 eternoNoch keine Bewertungen
- 2017 Mantenimiento Preventivo de Juntas MonoliticasDokument6 Seiten2017 Mantenimiento Preventivo de Juntas Monoliticasjorge armandoNoch keine Bewertungen
- Registro del cierre de inversiones en el Formato N° 09Dokument19 SeitenRegistro del cierre de inversiones en el Formato N° 09Jose Augusto SalasNoch keine Bewertungen
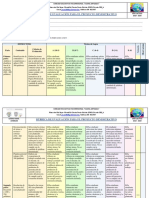
- Rúbrica de evaluación para proyecto demostrativoDokument5 SeitenRúbrica de evaluación para proyecto demostrativoAndrewAndy100% (2)
- Perfil profesional de Milton RiascosDokument23 SeitenPerfil profesional de Milton RiascosMarcela ChamorroNoch keine Bewertungen
- Pa 2 - Laboratorio de Liderazgo OkDokument4 SeitenPa 2 - Laboratorio de Liderazgo OkCatalina Ancalla AraujoNoch keine Bewertungen
- Contribuciones Al Psicoanalisis. Francesa. 1991 Rev.Dokument6 SeitenContribuciones Al Psicoanalisis. Francesa. 1991 Rev.asdddNoch keine Bewertungen
- Compresibilidad y Asentamientos v2020Dokument64 SeitenCompresibilidad y Asentamientos v2020Luis Felipe Guzman PulidoNoch keine Bewertungen
- Guia Economía Escasez y Bienes 10°Dokument3 SeitenGuia Economía Escasez y Bienes 10°Sandra Lorena HincapiéNoch keine Bewertungen
- Control de Cambios CVC BPMDokument4 SeitenControl de Cambios CVC BPMGlendaNoch keine Bewertungen
- Cartilla Economía y Turismo 2021Dokument30 SeitenCartilla Economía y Turismo 2021lauraNoch keine Bewertungen
- Unidad Ii Sesión - 02 BalonmanoDokument4 SeitenUnidad Ii Sesión - 02 BalonmanoEdita Guanilo PairazamanNoch keine Bewertungen
- Unidad 3 Computacion IIDokument84 SeitenUnidad 3 Computacion IIpiero NaranjoNoch keine Bewertungen
- Calculo Mecanico Del Conductor PDFDokument42 SeitenCalculo Mecanico Del Conductor PDFAntonio LinaresNoch keine Bewertungen
- PucaráDokument5 SeitenPucaráBernard Dorian GuamanNoch keine Bewertungen
- Seguridad Ante Tratamientos TérmicosDokument5 SeitenSeguridad Ante Tratamientos TérmicosYuliza Delia Huacca MamaniNoch keine Bewertungen
- Modelo de Formato de Cotizacion para Proy AguaDokument2 SeitenModelo de Formato de Cotizacion para Proy AguaSmith Acuña VeraNoch keine Bewertungen
- EL PRINCIPE Reporte de LecturaDokument5 SeitenEL PRINCIPE Reporte de LecturaJaime Ulises Gomez GonzalezNoch keine Bewertungen
- Comunidad de Propietarios: Ley de Propiedad HorizontalDokument16 SeitenComunidad de Propietarios: Ley de Propiedad HorizontalAngel Sanchez GarciaNoch keine Bewertungen
- Motor de Combustion Interna y Sus Sistemas PresentacionDokument34 SeitenMotor de Combustion Interna y Sus Sistemas Presentacionoxonoer100% (1)
- Reporte - N°2 - Electrónica Del VehículoDokument26 SeitenReporte - N°2 - Electrónica Del VehículoLucciano Aldahyr Hermosilla Becerra100% (1)
- Instrucciones de Obra de FabricaciónDokument15 SeitenInstrucciones de Obra de FabricaciónDavid Salguero OlveaNoch keine Bewertungen
- Unidad 3 Actividad 1 Estdisticas 2Dokument3 SeitenUnidad 3 Actividad 1 Estdisticas 2Luis RiveraNoch keine Bewertungen
- Dosificacion Bloque Uno QuintoDokument2 SeitenDosificacion Bloque Uno QuintoAna Lilia WongNoch keine Bewertungen
- Vivir La VidaDokument6 SeitenVivir La VidareyNoch keine Bewertungen
- A4 Taller de Controles Exixtenciales - 4491Dokument7 SeitenA4 Taller de Controles Exixtenciales - 4491milena alapeNoch keine Bewertungen