Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- ADS-B For BeginnersDokument12 SeitenADS-B For Beginnersson_gotenNoch keine Bewertungen
- Artificial Intelligence and Pattern Recognition Question BankDokument5 SeitenArtificial Intelligence and Pattern Recognition Question BankMATHANKUMAR.S100% (1)
- DabbawalaDokument3 SeitenDabbawalaspamNoch keine Bewertungen
- Convolution LectureDokument11 SeitenConvolution Lecturespong1ertzNoch keine Bewertungen
- Adu451604 PDFDokument2 SeitenAdu451604 PDFAnnBlissNoch keine Bewertungen
- Coupled Tanks - Workbook (Student) INGLÉS PDFDokument34 SeitenCoupled Tanks - Workbook (Student) INGLÉS PDFDanielaLópezNoch keine Bewertungen
- English OlympiadDokument5 SeitenEnglish OlympiadZakir Hossain50% (2)
- Tendernotice 2Dokument2 SeitenTendernotice 2kranthi142434Noch keine Bewertungen
- OceanCAM IP Internet Protocol CameraDokument2 SeitenOceanCAM IP Internet Protocol Camerakranthi142434Noch keine Bewertungen
- Dual. Modular. UniqueDokument144 SeitenDual. Modular. Uniquekranthi142434Noch keine Bewertungen
- CNC ToolingDokument3 SeitenCNC Toolingkranthi142434Noch keine Bewertungen
- Design Principles For EMIEMC Compliant Industrial Grade Products For Global MarketDokument6 SeitenDesign Principles For EMIEMC Compliant Industrial Grade Products For Global Marketkranthi142434Noch keine Bewertungen
- NonContactwhole Part Inspection FinalDokument10 SeitenNonContactwhole Part Inspection Finalkranthi142434Noch keine Bewertungen
- BASELAR NIRCameraDokument16 SeitenBASELAR NIRCamerakranthi142434Noch keine Bewertungen
- Vumii Catalog2015Dokument24 SeitenVumii Catalog2015kranthi142434Noch keine Bewertungen
- Permanent Magnet AC Tachometer:: Velocity SensorsDokument1 SeitePermanent Magnet AC Tachometer:: Velocity Sensorskranthi142434Noch keine Bewertungen
- (Ppower4) PDF Presentation Post Processor: Presentations With L Tex and Acrobat ReaderDokument15 Seiten(Ppower4) PDF Presentation Post Processor: Presentations With L Tex and Acrobat Readerkranthi142434Noch keine Bewertungen
- Document 1Dokument1 SeiteDocument 1kranthi142434Noch keine Bewertungen
- T MotorDokument5 SeitenT Motorkranthi142434Noch keine Bewertungen
- MANE 4240 & CIVL 4240 Introduction To Finite Elements: Prof. Suvranu deDokument40 SeitenMANE 4240 & CIVL 4240 Introduction To Finite Elements: Prof. Suvranu dekranthi142434Noch keine Bewertungen
- Laplace Transform Table: Appendix DDokument4 SeitenLaplace Transform Table: Appendix DHKVMVPVPV021511Noch keine Bewertungen
- Akamai Implementation Using Websphere CommerceDokument3 SeitenAkamai Implementation Using Websphere CommercesharmisthamonaNoch keine Bewertungen
- Saxena MonaDokument114 SeitenSaxena Mona66ANAND66Noch keine Bewertungen
- Natron DocumentationDokument1.472 SeitenNatron DocumentationWibiNoch keine Bewertungen
- Rbafy-Database SQL Programming 7.1Dokument508 SeitenRbafy-Database SQL Programming 7.1dhanoj6522Noch keine Bewertungen
- Usando Caché - ODBC PDFDokument38 SeitenUsando Caché - ODBC PDFlvaldeirNoch keine Bewertungen
- Spring Embedders and Force Directed Graph Drawing AlgorithmsDokument23 SeitenSpring Embedders and Force Directed Graph Drawing AlgorithmsTurcikNoch keine Bewertungen
- Lecture 1 - HCI IntroDokument32 SeitenLecture 1 - HCI IntroSulaman AhmadNoch keine Bewertungen
- Final Project Proposal Template (MUL)Dokument5 SeitenFinal Project Proposal Template (MUL)Laiba KhanNoch keine Bewertungen
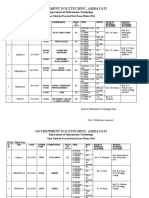
- Government Polytechnic, Amravati: Department of Information TechnologyDokument23 SeitenGovernment Polytechnic, Amravati: Department of Information Technologyswapnil kaleNoch keine Bewertungen
- D3 DebugDokument24 SeitenD3 DebugCarlos Javier Quispe GuevaraNoch keine Bewertungen
- The Abcs of ErpDokument17 SeitenThe Abcs of ErppohilabandhuNoch keine Bewertungen
- 51841Dokument15 Seiten51841Hermenegildo LuisNoch keine Bewertungen
- Etsi TS 134 123-1Dokument40 SeitenEtsi TS 134 123-1bmurugan123Noch keine Bewertungen
- Math 200 3Dokument2 SeitenMath 200 3SamanthaNoch keine Bewertungen
- Lab 9 Inheritance BESE-11Dokument7 SeitenLab 9 Inheritance BESE-11Eisha FatimaNoch keine Bewertungen
- Ccnpv7 Route Lab7-2 BGP As Path InstructorDokument11 SeitenCcnpv7 Route Lab7-2 BGP As Path Instructortaco19933Noch keine Bewertungen
- DIS Diighl7lDokument46 SeitenDIS Diighl7lJose Perez PerezNoch keine Bewertungen
- Introduction To Numerical Methods in Chemical Engineering - P. Ahuja PDFDokument99 SeitenIntroduction To Numerical Methods in Chemical Engineering - P. Ahuja PDFSarath RNoch keine Bewertungen
- Building A Reusable LAMMPS Script Library: Craig Tenney Edward MaginnDokument24 SeitenBuilding A Reusable LAMMPS Script Library: Craig Tenney Edward MaginnSwati VermaNoch keine Bewertungen
- Introduction To DVB-T2Dokument142 SeitenIntroduction To DVB-T2arsenaldoNoch keine Bewertungen
- Jjwdesign Google Maps: Sugarcrm Module Frequently Asked QuestionsDokument4 SeitenJjwdesign Google Maps: Sugarcrm Module Frequently Asked QuestionsGuillermo ScarelloNoch keine Bewertungen
- Feature List of Huawei UMTS RAN11.0 V1.7 (20090331)Dokument14 SeitenFeature List of Huawei UMTS RAN11.0 V1.7 (20090331)EmreNoch keine Bewertungen