Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- ATPMAT: An Open Source Toolbox For Systematic Creation of EMTP Cases in ATP Using MatlabDokument6 SeitenATPMAT: An Open Source Toolbox For Systematic Creation of EMTP Cases in ATP Using MatlabLalo PatoNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- 1 s2.0 S1877705813001562 MainDokument10 Seiten1 s2.0 S1877705813001562 MainIvan StarovlahNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Substation Insulation Coordination Studies-Sparacino PDFDokument42 SeitenSubstation Insulation Coordination Studies-Sparacino PDFPaco Mj100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- SEMIKRON Application-Note Insulation Coordination EN 2017-12-07 Rev-03 PDFDokument25 SeitenSEMIKRON Application-Note Insulation Coordination EN 2017-12-07 Rev-03 PDFJessica LombanaNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Statistic Output SwitchDokument32 SeitenStatistic Output SwitchLalo PatoNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Berge TransDokument6 SeitenBerge TransrafazildomaiNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Insulation CoordinationDokument19 SeitenInsulation CoordinationLalo PatoNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- ABB DA Section 8.2Dokument28 SeitenABB DA Section 8.2ronald_chan_2Noch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- OtsDokument10 SeitenOtsLalo PatoNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Te318 PDFDokument6 SeitenTe318 PDFJennifer CharlesNoch keine Bewertungen
- 1VAP429701 DB - VOY 15 - VOY 15G.pdDokument4 Seiten1VAP429701 DB - VOY 15 - VOY 15G.pdLalo PatoNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- OUTLINE DRAWING 27KV 1250A/2000A: Technology LTDDokument1 SeiteOUTLINE DRAWING 27KV 1250A/2000A: Technology LTDLalo PatoNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- ElectraDokument26 SeitenElectraLalo PatoNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Substation Design - ManualDokument127 SeitenSubstation Design - Manualmujeeb.alam489% (9)
- Standard Basic Impulse Insulation Levels: Commrdinatt InsulaetiongorrevisiDokument1 SeiteStandard Basic Impulse Insulation Levels: Commrdinatt InsulaetiongorrevisiLalo PatoNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Automatic Matlab and DIgSILENTDokument2 SeitenAutomatic Matlab and DIgSILENTLalo Pato100% (1)
- Selección de PararrayosDokument3 SeitenSelección de PararrayosLalo PatoNoch keine Bewertungen
- Lightning ProtectionDokument8 SeitenLightning ProtectionLalo PatoNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Tecnicas para Cartas de Amor U OdioDokument4 SeitenTecnicas para Cartas de Amor U OdioChristian Gabriel Stampacchio100% (16)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Arc Flash Analysis - IEEE Vs NFPA 70E TablesDokument11 SeitenArc Flash Analysis - IEEE Vs NFPA 70E TablesMorales Gonzalez100% (2)
- Spinning Reserve Constrainde Static and Dynamic Economic DispatchDokument8 SeitenSpinning Reserve Constrainde Static and Dynamic Economic DispatchLalo PatoNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Particle Swarm Optimization Method For Constrained Optimization ProblemsDokument7 SeitenParticle Swarm Optimization Method For Constrained Optimization Problemssab_franc5286Noch keine Bewertungen
- Asym Current PDFDokument4 SeitenAsym Current PDFLalo PatoNoch keine Bewertungen
- Model Predictive ControlDokument26 SeitenModel Predictive Controlrodrigo_trentiniNoch keine Bewertungen
- Min Span TreeDokument25 SeitenMin Span TreeLalo PatoNoch keine Bewertungen
- Asymmetrical PDFDokument4 SeitenAsymmetrical PDFLalo PatoNoch keine Bewertungen
- GrahamHell HistoryMSTDokument15 SeitenGrahamHell HistoryMSTIR AR ERNoch keine Bewertungen
- Prims AlgorithmDokument32 SeitenPrims AlgorithmtigersayoojNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- 15.093 Optimization MethodsDokument10 Seiten15.093 Optimization MethodsLalo PatoNoch keine Bewertungen
- Robust OptimizationDokument26 SeitenRobust OptimizationLalo PatoNoch keine Bewertungen
- Active Power, Reactive Power, Apparent Power, PoweDokument12 SeitenActive Power, Reactive Power, Apparent Power, PoweAkki TandelNoch keine Bewertungen
- Rev Qty Identifying Symbol Identification Data Description & FunctionDokument1 SeiteRev Qty Identifying Symbol Identification Data Description & FunctionFarhan ShahNoch keine Bewertungen
- Optimal Placement and Capacity of Capacitor Bank in Radial Distribution SystemDokument9 SeitenOptimal Placement and Capacity of Capacitor Bank in Radial Distribution Systempb21Noch keine Bewertungen
- Lecture 1 Load Flow StudiesDokument34 SeitenLecture 1 Load Flow StudiesYemsrach sisayNoch keine Bewertungen
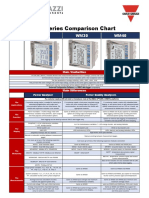
- Comparison Chart WM20 WM30 WM40Dokument1 SeiteComparison Chart WM20 WM30 WM40Juan de DiosNoch keine Bewertungen
- Electric Power TransmissionDokument6 SeitenElectric Power TransmissionLimuel John Vera CruzNoch keine Bewertungen
- EE203 Lab ManualDokument48 SeitenEE203 Lab Manualkannanchammy100% (1)
- 12 - Control and MonitoringDokument50 Seiten12 - Control and MonitoringmentongNoch keine Bewertungen
- Philips+Lc7.2e+Paplasma ChassisDokument91 SeitenPhilips+Lc7.2e+Paplasma ChassisWalter_Antonio_5973Noch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- AN521 Microchip Interfacing To AC Power LinesDokument4 SeitenAN521 Microchip Interfacing To AC Power LinesLEONO_MAXNoch keine Bewertungen
- Model Acceptance Test Guideline Feb 2021Dokument59 SeitenModel Acceptance Test Guideline Feb 2021try AGAINNoch keine Bewertungen
- Q Series Energy Measuring Module QE81WH CatalogDokument8 SeitenQ Series Energy Measuring Module QE81WH CatalogAndrew MaverickNoch keine Bewertungen
- LZQJ DLMS e 1.25Dokument19 SeitenLZQJ DLMS e 1.25vietbkfet0% (1)
- Solution Manual For Power System AnalysiDokument15 SeitenSolution Manual For Power System AnalysiZulfan Jauhar0% (1)
- D11 - Power Manager UA Regulation Functionalities-GD180267 R2Dokument20 SeitenD11 - Power Manager UA Regulation Functionalities-GD180267 R2Mạc DavidNoch keine Bewertungen
- Difference Between Leading and Lagging Power FactorDokument5 SeitenDifference Between Leading and Lagging Power Factorad bdNoch keine Bewertungen
- 1.examination of Major Factors Affecting Voltage Variation On Distribution FeedersDokument6 Seiten1.examination of Major Factors Affecting Voltage Variation On Distribution FeedersRand N Khier-bekNoch keine Bewertungen
- DatasheetDokument68 SeitenDatasheetNajam Us SaqibNoch keine Bewertungen
- Contingency Analysis of Power Systems PDFDokument4 SeitenContingency Analysis of Power Systems PDFbenitogaldos19gmail.comNoch keine Bewertungen
- Paper 6181 NF 20050106Dokument25 SeitenPaper 6181 NF 20050106Geison DiazNoch keine Bewertungen
- 10 1 1 66 8175 PDFDokument79 Seiten10 1 1 66 8175 PDFVlad StolyarovNoch keine Bewertungen
- 500kW User ManualDokument83 Seiten500kW User ManualvanhoackdNoch keine Bewertungen
- Modbus Mapping - Apex 100Dokument24 SeitenModbus Mapping - Apex 100AnandSreeNoch keine Bewertungen
- Three Phase CircuitsDokument17 SeitenThree Phase CircuitsKrishna Reddy Y.VNoch keine Bewertungen
- AdaptiVolt™ Vs LDC CVRDokument7 SeitenAdaptiVolt™ Vs LDC CVRMac NeillNoch keine Bewertungen
- Watt Hour 00220aDokument97 SeitenWatt Hour 00220ajb609Noch keine Bewertungen
- IPFC ControllerDokument18 SeitenIPFC ControllerNaveen KumarNoch keine Bewertungen
- UntitledDokument30 SeitenUntitledYowgeyo OgdisinNoch keine Bewertungen
- Dynamic Modeling of GE 1.5 andDokument31 SeitenDynamic Modeling of GE 1.5 andErtuğrul ÇamNoch keine Bewertungen
- Course: ELEC ENG 3110 Electric Power Systems ELEC ENG 7074 Power Systems PG (Semester 2, 2022)Dokument25 SeitenCourse: ELEC ENG 3110 Electric Power Systems ELEC ENG 7074 Power Systems PG (Semester 2, 2022)Jabin XingNoch keine Bewertungen
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldVon EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldBewertung: 4.5 von 5 Sternen4.5/5 (55)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewVon EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewBewertung: 4.5 von 5 Sternen4.5/5 (104)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveVon EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNoch keine Bewertungen
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindVon EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNoch keine Bewertungen
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziVon Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziNoch keine Bewertungen
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessVon EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNoch keine Bewertungen
- Generative AI: The Insights You Need from Harvard Business ReviewVon EverandGenerative AI: The Insights You Need from Harvard Business ReviewBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Working with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)Von EverandWorking with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)Bewertung: 5 von 5 Sternen5/5 (5)