Das könnte Ihnen auch gefallen
- Algorithm Allocation: System Security Improvement Differential EvolutionDokument6 SeitenAlgorithm Allocation: System Security Improvement Differential EvolutionPiyush AgnihotriNoch keine Bewertungen
- The Use of Voltage Stability Indices and Proposed Instability Prediction To Coordinate With Protection SystemsDokument6 SeitenThe Use of Voltage Stability Indices and Proposed Instability Prediction To Coordinate With Protection SystemsNarvin Raj ChandraNoch keine Bewertungen
- keywords" content="call for paper 2012, hard copy of journal, research paper publishing, where to publish research paper, journal publishing, how to publish research paper, Call For research paper, international journal, publishing a paper, IJERD, journal of science and technology, how to get a research paper published, publishing a paper, publishing of journal, publishing of research paper, reserach and review articles, IJERD Journal, How to publish your research paper, publish research paper, open access engineering journal, Engineering journal, Mathemetics journal, Physics journal, Chemistry journal, Computer Engineering, Computer Science journal, how to submit your paper, peer reviw journal, indexed journal, reserach and review articles, engineering journal, www.ijerd.com, research journals, yahoo journals, bing journals, International Journal of Engineering Research and Development, google journals, hard copy of journal,Dokument8 Seitenkeywords" content="call for paper 2012, hard copy of journal, research paper publishing, where to publish research paper, journal publishing, how to publish research paper, Call For research paper, international journal, publishing a paper, IJERD, journal of science and technology, how to get a research paper published, publishing a paper, publishing of journal, publishing of research paper, reserach and review articles, IJERD Journal, How to publish your research paper, publish research paper, open access engineering journal, Engineering journal, Mathemetics journal, Physics journal, Chemistry journal, Computer Engineering, Computer Science journal, how to submit your paper, peer reviw journal, indexed journal, reserach and review articles, engineering journal, www.ijerd.com, research journals, yahoo journals, bing journals, International Journal of Engineering Research and Development, google journals, hard copy of journal,IJERDNoch keine Bewertungen
- Optimal Sizing of SSSC Controllers To Minimize Transmission Loss and A Novel Model of SSSC To Study Transient ResponseDokument7 SeitenOptimal Sizing of SSSC Controllers To Minimize Transmission Loss and A Novel Model of SSSC To Study Transient ResponseVenki PowerfulmanNoch keine Bewertungen
- Erlich 2011 ADokument7 SeitenErlich 2011 AsubasratnaNoch keine Bewertungen
- Upfc PDFDokument5 SeitenUpfc PDFHarish KumarNoch keine Bewertungen
- Optimal Placement of SVC and Statcom For Voltage Stability Enhancement Under Contingency Using Cat Swarm OptimizationDokument16 SeitenOptimal Placement of SVC and Statcom For Voltage Stability Enhancement Under Contingency Using Cat Swarm Optimizationsabarullah haliNoch keine Bewertungen
- Loss Optimization For Voltage Stability Enhancement Incorporating UPFC Using Particle Swarm OptimizationDokument7 SeitenLoss Optimization For Voltage Stability Enhancement Incorporating UPFC Using Particle Swarm OptimizationSrivaishnavi KalahasthiNoch keine Bewertungen
- Modeling and Simulation of SRF and P-Q Based Control DstatcomDokument7 SeitenModeling and Simulation of SRF and P-Q Based Control DstatcomIJERDNoch keine Bewertungen
- Modeling and simulation of TCSC for optimal power flow solution using NR methodDokument4 SeitenModeling and simulation of TCSC for optimal power flow solution using NR methodumubyeyidevothaNoch keine Bewertungen
- Analysis and Assessment of STATCOM-based Damping Stabilizers For Power System Stability EnhancementDokument9 SeitenAnalysis and Assessment of STATCOM-based Damping Stabilizers For Power System Stability EnhancementabubakarNoch keine Bewertungen
- Global Voltage Stability Analysis of A Power System Using Network Equivalencing Technique in The Presence of TCSCDokument18 SeitenGlobal Voltage Stability Analysis of A Power System Using Network Equivalencing Technique in The Presence of TCSCblaagicaNoch keine Bewertungen
- Optimal Placement of SVC and Statcom For Voltage Stability Enhancement Under Contingency Using Cat Swarm OptimizationDokument12 SeitenOptimal Placement of SVC and Statcom For Voltage Stability Enhancement Under Contingency Using Cat Swarm OptimizationIJAET JournalNoch keine Bewertungen
- Digital Differential Relaying Scheme For Teed Circuits Based On Voltage and Current Signal ComparisonDokument10 SeitenDigital Differential Relaying Scheme For Teed Circuits Based On Voltage and Current Signal ComparisonKumar DhirajNoch keine Bewertungen
- Ijeet: International Journal of Electrical Engineering & Technology (Ijeet)Dokument9 SeitenIjeet: International Journal of Electrical Engineering & Technology (Ijeet)IAEME PublicationNoch keine Bewertungen
- Analysis and Assessment of STATCOM-based Damping Stabilizers For Power System Stability EnhancementDokument9 SeitenAnalysis and Assessment of STATCOM-based Damping Stabilizers For Power System Stability EnhancementsirageldeenNoch keine Bewertungen
- Fast Calculation of A Voltage Stability IndexDokument11 SeitenFast Calculation of A Voltage Stability IndexphieuxuatkhoNoch keine Bewertungen
- Real Power Loss and Voltage Stability Limit Optimization PDFDokument10 SeitenReal Power Loss and Voltage Stability Limit Optimization PDFJEBARAJNoch keine Bewertungen
- Eija Er 1022Dokument10 SeitenEija Er 1022Anikendu MaitraNoch keine Bewertungen
- An OPF Based Algorithm To Evaluate Load Curtailment Incorporating Voltage Stability Margin CriterionDokument4 SeitenAn OPF Based Algorithm To Evaluate Load Curtailment Incorporating Voltage Stability Margin CriterionAmine BenseddikNoch keine Bewertungen
- Post-Outage State Estimations For Outage ManagementDokument5 SeitenPost-Outage State Estimations For Outage ManagementSlimane SouagNoch keine Bewertungen
- Multi Objective 11Dokument10 SeitenMulti Objective 11ragvshahNoch keine Bewertungen
- Multi Line Flexible Alternating Current Transmission System FACTS Controller For Transient Stability Analysis of A Multi MachinDokument11 SeitenMulti Line Flexible Alternating Current Transmission System FACTS Controller For Transient Stability Analysis of A Multi MachinMary MorseNoch keine Bewertungen
- Application of HSA and GA in Optimal Placement of FACTS Devices Considering Voltage Stability and LossesDokument7 SeitenApplication of HSA and GA in Optimal Placement of FACTS Devices Considering Voltage Stability and LossesAbdulrazzaq F. AttoNoch keine Bewertungen
- Dynamic Methodology For Control of Multiple-UPFC To Relieve Overloads and Voltage ViolationsDokument7 SeitenDynamic Methodology For Control of Multiple-UPFC To Relieve Overloads and Voltage ViolationsHossein Sam AshkanianNoch keine Bewertungen
- List of SymbolsDokument30 SeitenList of Symbolskmd_venkatsubbuNoch keine Bewertungen
- International Journal of Engineering Research and Development (IJERD)Dokument9 SeitenInternational Journal of Engineering Research and Development (IJERD)IJERDNoch keine Bewertungen
- A Robust Control Strategy For UPFC To Improve Transient Stability Using Fuzzy Bang-Bang ControlDokument5 SeitenA Robust Control Strategy For UPFC To Improve Transient Stability Using Fuzzy Bang-Bang ControlXahid YousafNoch keine Bewertungen
- Contingency Evaluation For Voltage Security Assessment of Power SystemsDokument4 SeitenContingency Evaluation For Voltage Security Assessment of Power Systemssmriti_hunny5969Noch keine Bewertungen
- A Novel Approach To Optimal Allocation of SVC Using Genetic Algorithms and Continuation Power FlowDokument5 SeitenA Novel Approach To Optimal Allocation of SVC Using Genetic Algorithms and Continuation Power FlowMadalena TrindadeNoch keine Bewertungen
- Research Article: Implementation of Static Line Voltage Stability Indices For Improved Static Voltage Stability MarginDokument15 SeitenResearch Article: Implementation of Static Line Voltage Stability Indices For Improved Static Voltage Stability MarginHOD EEE SVECNoch keine Bewertungen
- Using FACTS Controllers To Maximize Available Transfer CapabilityDokument9 SeitenUsing FACTS Controllers To Maximize Available Transfer CapabilitySaswat MohantyNoch keine Bewertungen
- Dissipativity Properties of Detailed Models of Synchronous GeneratorsDokument6 SeitenDissipativity Properties of Detailed Models of Synchronous Generatorssridhar_n@email.comNoch keine Bewertungen
- 0 PepeDokument7 Seiten0 PepeVaisakh_k5683Noch keine Bewertungen
- Comparison of PSS, SVC and STATCOM Controllers For Damping Power System OscillationsDokument8 SeitenComparison of PSS, SVC and STATCOM Controllers For Damping Power System Oscillationssyed Mujtaba hassanNoch keine Bewertungen
- A Case Study of Load Flow and Optimal Load Flow Analysis On 400 KV Sub-Station SojaDokument5 SeitenA Case Study of Load Flow and Optimal Load Flow Analysis On 400 KV Sub-Station SojaJoe RanteNoch keine Bewertungen
- Coordination Design PSS and TCSC Controller For Power System Stability Improvement Using CLA-PSO AlgorithmDokument10 SeitenCoordination Design PSS and TCSC Controller For Power System Stability Improvement Using CLA-PSO Algorithmvinodkumar57Noch keine Bewertungen
- Gobind KSR Conf PaperDokument7 SeitenGobind KSR Conf PaperRagul DuraisamyNoch keine Bewertungen
- A New Approach For Placement of FACTS Devices in Open Power MarketsDokument3 SeitenA New Approach For Placement of FACTS Devices in Open Power MarketsheerapotterNoch keine Bewertungen
- DC Load FlowDokument5 SeitenDC Load Flowstrange_kid82100% (1)
- Ijeet: International Journal of Electrical Engineering & Technology (Ijeet)Dokument8 SeitenIjeet: International Journal of Electrical Engineering & Technology (Ijeet)IAEME PublicationNoch keine Bewertungen
- Cascade Failures from Distributed Renewable Generation in Power GridsDokument10 SeitenCascade Failures from Distributed Renewable Generation in Power GridsRaheel Khan BhittaniNoch keine Bewertungen
- EPPE Power Seminar Series May 3, 2001: Texas A&M UniversityDokument28 SeitenEPPE Power Seminar Series May 3, 2001: Texas A&M UniversitySouvik MandalNoch keine Bewertungen
- Improvement of Voltage Profile Through The Optimal Placement of FACTS Using L-Index MethodDokument5 SeitenImprovement of Voltage Profile Through The Optimal Placement of FACTS Using L-Index MethodRavishankar KankaleNoch keine Bewertungen
- A Method For Voltage Stability Enhancement Using Soft ComputingDokument9 SeitenA Method For Voltage Stability Enhancement Using Soft ComputingIPASJNoch keine Bewertungen
- A Comparison of The Voltage Enhancement and Loss Reduction Capabilities of STATCOM and SSSC FACTS ControllersDokument10 SeitenA Comparison of The Voltage Enhancement and Loss Reduction Capabilities of STATCOM and SSSC FACTS ControllersAJER JOURNALNoch keine Bewertungen
- A Platform For For Valodation of FACTS ModelsDokument8 SeitenA Platform For For Valodation of FACTS ModelsJorge ZuluagaNoch keine Bewertungen
- Best Power Surge Using Fuzzy Controlled Genetic TechniqueDokument7 SeitenBest Power Surge Using Fuzzy Controlled Genetic TechniqueInternational Organization of Scientific Research (IOSR)Noch keine Bewertungen
- M691 Final Report (2011-2012) - Stochastic Power Grid ModelDokument6 SeitenM691 Final Report (2011-2012) - Stochastic Power Grid ModelaortizperuNoch keine Bewertungen
- Fate Hi 2007Dokument6 SeitenFate Hi 2007Sergio GaramendiNoch keine Bewertungen
- IEEE Power System Paper-Analysis of Power System Linearized Model With STATCOM Based Damping StabilizerDokument7 SeitenIEEE Power System Paper-Analysis of Power System Linearized Model With STATCOM Based Damping StabilizerAnoop MathewNoch keine Bewertungen
- Ijettcs 2014 09 24 36 PDFDokument6 SeitenIjettcs 2014 09 24 36 PDFInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Power System EquivalentsDokument6 SeitenPower System Equivalentsdallisrinivas14Noch keine Bewertungen
- International Journal of Engineering Research and DevelopmentDokument9 SeitenInternational Journal of Engineering Research and DevelopmentIJERDNoch keine Bewertungen
- Study of Power System Security in Indian Utility 62 Bus SystemDokument10 SeitenStudy of Power System Security in Indian Utility 62 Bus SystempjNoch keine Bewertungen
- Synchronous-Reference-Frame-Based Control Method For UPQC Under Unbalanced and Distorted Load ConditionsDokument9 SeitenSynchronous-Reference-Frame-Based Control Method For UPQC Under Unbalanced and Distorted Load Conditionsrmsharma1970Noch keine Bewertungen
- University of Energy and Natural Resources, SunyaniDokument19 SeitenUniversity of Energy and Natural Resources, SunyaniGodfred NkansahNoch keine Bewertungen
- Instantaneous Voltage Estimation For Assessment and Monitoring of Flicker Indices in Power SystemsDokument6 SeitenInstantaneous Voltage Estimation For Assessment and Monitoring of Flicker Indices in Power SystemsPradyumna Kumar BeheraNoch keine Bewertungen
- A Novel Facts Compensation Scheme For Power Quality Improvement in Wind Smart GridDokument4 SeitenA Novel Facts Compensation Scheme For Power Quality Improvement in Wind Smart GridbarneypseNoch keine Bewertungen
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlVon EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlBewertung: 5 von 5 Sternen5/5 (1)
- NIPS 2005 Assessing Approximations For Gaussian Process Classification PaperDokument8 SeitenNIPS 2005 Assessing Approximations For Gaussian Process Classification Papersf111Noch keine Bewertungen
- Generic Microgrid Controller SpecificationsDokument43 SeitenGeneric Microgrid Controller Specificationssf111Noch keine Bewertungen
- Energy Rating: Property TypeDokument6 SeitenEnergy Rating: Property Typesf111Noch keine Bewertungen
- Clarifying Grid Code Fast Fault Current Injection RequirementsDokument8 SeitenClarifying Grid Code Fast Fault Current Injection Requirementssf111Noch keine Bewertungen
- Gaussian Processes For Regression: A TutorialDokument7 SeitenGaussian Processes For Regression: A Tutorialsf111Noch keine Bewertungen
- IEEE Standard For The Specification of Microgrid ControllersDokument43 SeitenIEEE Standard For The Specification of Microgrid Controllerssf111Noch keine Bewertungen
- PG&E Microgrid Program ApprovedDokument89 SeitenPG&E Microgrid Program Approvedsf111Noch keine Bewertungen
- Simple Representation of Dynamic Hysteresis Losses in Power TransformersDokument8 SeitenSimple Representation of Dynamic Hysteresis Losses in Power Transformerssf111Noch keine Bewertungen
- Grid-Connected Power ConditionerDokument6 SeitenGrid-Connected Power Conditionersf111Noch keine Bewertungen
- IET Wiring Regulations BS 7671 18th Edition: Transient Overvoltage ProtectionDokument20 SeitenIET Wiring Regulations BS 7671 18th Edition: Transient Overvoltage ProtectionJackNoch keine Bewertungen
- Microgrid A Conceptual Solution - 01354758Dokument6 SeitenMicrogrid A Conceptual Solution - 01354758sf111Noch keine Bewertungen
- Fault Reduction Strategy using Neutral Earth Resistor Installation (NERIDokument15 SeitenFault Reduction Strategy using Neutral Earth Resistor Installation (NERIYume YumeNoch keine Bewertungen
- IET Wiring Regulations BS 7671 18th Edition: Transient Overvoltage ProtectionDokument20 SeitenIET Wiring Regulations BS 7671 18th Edition: Transient Overvoltage ProtectionJackNoch keine Bewertungen
- Frequency Stabilization in TransmissionDokument9 SeitenFrequency Stabilization in Transmissionsf111Noch keine Bewertungen
- Harmonic Analysis: Registration InformationDokument2 SeitenHarmonic Analysis: Registration Informationsf111Noch keine Bewertungen
- Electra 028Dokument27 SeitenElectra 028sf111Noch keine Bewertungen
- Swedish Neutral Neutral Earthing Resistor Specification PDFDokument12 SeitenSwedish Neutral Neutral Earthing Resistor Specification PDFRazvan CostacheNoch keine Bewertungen
- ABB 2493 Is Limiter GB NewBrandingDokument20 SeitenABB 2493 Is Limiter GB NewBrandingsf111Noch keine Bewertungen
- Optiplex-7010 Owner's Manual2 En-UsDokument60 SeitenOptiplex-7010 Owner's Manual2 En-Ussf111Noch keine Bewertungen
- Par Syn GenDokument14 SeitenPar Syn GenRafael RoratoNoch keine Bewertungen
- PVS980 Product OverviewDokument51 SeitenPVS980 Product Overviewsf111Noch keine Bewertungen
- Optimization of VoltageDokument6 SeitenOptimization of Voltagesf111Noch keine Bewertungen
- Bath Installation GuideDokument4 SeitenBath Installation Guidesf111Noch keine Bewertungen
- Power Abb DrivesDokument16 SeitenPower Abb Drivessf111Noch keine Bewertungen
- Brugg Cables User GuideDokument27 SeitenBrugg Cables User GuideMehdi_Mashayekhi_172Noch keine Bewertungen
- Rosa 1908Dokument44 SeitenRosa 1908joaomonterosNoch keine Bewertungen
- ICC C35D: Sheath Bonding of Multi-Conductor / Parallel CircuitsDokument24 SeitenICC C35D: Sheath Bonding of Multi-Conductor / Parallel Circuitssf111Noch keine Bewertungen
- 9 Ashwani Power System State Estimation PDFDokument54 Seiten9 Ashwani Power System State Estimation PDFsf111Noch keine Bewertungen
- Par Syn GenDokument14 SeitenPar Syn GenRafael RoratoNoch keine Bewertungen
- P54439EP - Drawings PDFDokument4 SeitenP54439EP - Drawings PDFsf111Noch keine Bewertungen
- Performance of Filler Material in GabionsDokument4 SeitenPerformance of Filler Material in GabionsPreetham N KumarNoch keine Bewertungen
- Cable Drag ChainDokument44 SeitenCable Drag ChainsunhuynhNoch keine Bewertungen
- Symbolic Calculus Sage ReferenceDokument25 SeitenSymbolic Calculus Sage ReferenceLn Amitav BiswasNoch keine Bewertungen
- Ford Taurus Service Manual - Disassembly and Assembly - Automatic Transaxle-Transmission - 6F35 - Automatic Transmission - PowertrainDokument62 SeitenFord Taurus Service Manual - Disassembly and Assembly - Automatic Transaxle-Transmission - 6F35 - Automatic Transmission - Powertraininfocarsservice.deNoch keine Bewertungen
- Service Agreement - Zeroid PDFDokument2 SeitenService Agreement - Zeroid PDFYushau Muhammad LawalNoch keine Bewertungen
- Ozone Layer EssayDokument7 SeitenOzone Layer Essayb71bpjha100% (2)
- D37H-08A ManualDokument56 SeitenD37H-08A Manuallijie100% (1)
- AmpConectorsExtracto PDFDokument5 SeitenAmpConectorsExtracto PDFAdrian AvilesNoch keine Bewertungen
- Manual Lift Release System: Parts List and DiagramsDokument4 SeitenManual Lift Release System: Parts List and DiagramsPartagon PowNoch keine Bewertungen
- Handout Week10.1Dokument7 SeitenHandout Week10.1Antoniette Niña YusonNoch keine Bewertungen
- Virtual Art PaperDokument5 SeitenVirtual Art Paperbrandy oldfieldNoch keine Bewertungen
- Metaswitch Datasheet Network Transformation OverviewDokument5 SeitenMetaswitch Datasheet Network Transformation OverviewblitoNoch keine Bewertungen
- Deepali Bhartiya: TCI Express Limited Gurgaon Assistant Manager Prateek Group Noida Senior ExecutiveDokument3 SeitenDeepali Bhartiya: TCI Express Limited Gurgaon Assistant Manager Prateek Group Noida Senior ExecutiveThe Cultural CommitteeNoch keine Bewertungen
- Microsoft PowerPoint Presentation IFRSDokument27 SeitenMicrosoft PowerPoint Presentation IFRSSwati SharmaNoch keine Bewertungen
- Gel Electrophoresis Lab ReportDokument10 SeitenGel Electrophoresis Lab Reportapi-31150900783% (6)
- Glycerol Mono StreateDokument6 SeitenGlycerol Mono StreateJaleel AhmedNoch keine Bewertungen
- Jurnal Aceh MedikaDokument10 SeitenJurnal Aceh MedikaJessica SiraitNoch keine Bewertungen
- HRBPDokument8 SeitenHRBPPriscilia KarinaNoch keine Bewertungen
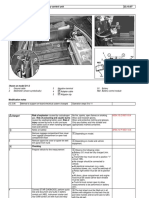
- Checking battery control unitDokument3 SeitenChecking battery control unitjuanNoch keine Bewertungen
- Batangas State University - Testing and Admission OfficeDokument2 SeitenBatangas State University - Testing and Admission OfficeDolly Manalo100% (1)
- Tie Technology DK SKDokument32 SeitenTie Technology DK SKVladimir PleșcaNoch keine Bewertungen
- Orbeez Sorting and Patterns Learning ExperienceDokument5 SeitenOrbeez Sorting and Patterns Learning Experienceapi-349800041Noch keine Bewertungen
- National Artists of the PhilippinesDokument66 SeitenNational Artists of the Philippinesshey mahilumNoch keine Bewertungen
- Consumer Behavior, Market Segmentation and Marketing PlanDokument57 SeitenConsumer Behavior, Market Segmentation and Marketing PlanShubhamNoch keine Bewertungen
- Gulliver's Travels Misogyny or MisanthropyDokument3 SeitenGulliver's Travels Misogyny or MisanthropyKingshuk MondalNoch keine Bewertungen
- BC C Punmia BeamDokument14 SeitenBC C Punmia BeamvikrantgoudaNoch keine Bewertungen
- Blasting 001 Abb WarehouseDokument2 SeitenBlasting 001 Abb WarehouseferielvpkNoch keine Bewertungen
- GX Audit Internal Audit Risk and Opportunities For 2022Dokument26 SeitenGX Audit Internal Audit Risk and Opportunities For 2022Muhammad SamiNoch keine Bewertungen
- CH06 Binding MaterialsDokument114 SeitenCH06 Binding MaterialsAbass AwalehNoch keine Bewertungen
- SDH PDFDokument370 SeitenSDH PDFClaudia GafencuNoch keine Bewertungen