Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Child and Adolescent Learners and Learning PrinciplesDokument8 SeitenThe Child and Adolescent Learners and Learning PrinciplesAragon KhailNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- SRMDokument4 SeitenSRMinocente333Noch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- APCO CSAA ANS2 101 1webfinalDokument38 SeitenAPCO CSAA ANS2 101 1webfinalJUAN CAMILO VALENCIA VALENCIANoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- 3393 - Supervision of Concrete Construction Volume 2Dokument271 Seiten3393 - Supervision of Concrete Construction Volume 2Oum ChhayNoy100% (11)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- 747Dokument12 Seiten747GurdevBaines100% (3)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Zoom and Re-Zoom Team ActivityDokument2 SeitenZoom and Re-Zoom Team ActivityWalshie28050% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Daftar Isian 3 Number Plate, Danger Plate, Anti Climbing DeviceDokument2 SeitenDaftar Isian 3 Number Plate, Danger Plate, Anti Climbing DeviceMochammad Fauzian RafsyanzaniNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Aesa Vs PesaDokument30 SeitenAesa Vs Pesakab11512100% (1)
- Checklist For Rebar and Concrete WorkDokument4 SeitenChecklist For Rebar and Concrete WorkDwinto RachmadNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- So You Want To Have Your Own Cosmetics BrandDokument3 SeitenSo You Want To Have Your Own Cosmetics BrandCarlosNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- 3PM - Project Management Method - Sales MessagingDokument5 Seiten3PM - Project Management Method - Sales Messagingberuang kutubNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Panasonic Sa Akx10ph PNDokument114 SeitenPanasonic Sa Akx10ph PNimmortalwombatNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Legislation Statutory Inspection ChecklistDokument2 SeitenLegislation Statutory Inspection ChecklistAry PutraNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Problems Involving Sequences: Grade 10Dokument9 SeitenProblems Involving Sequences: Grade 10Jhiemalyn RonquilloNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Refraction Experiment-PekaDokument8 SeitenRefraction Experiment-PekaA. Suhaimi100% (3)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Module 2: Most Essential Learning Competencies (Melcs) : Lesson 1: Background, Rationale, and Development of MelcsDokument5 SeitenModule 2: Most Essential Learning Competencies (Melcs) : Lesson 1: Background, Rationale, and Development of MelcsRobert Kier Tanquerido TomaroNoch keine Bewertungen
- Filled System Temperature Recorders & Recorder Controllers: SpecificationDokument2 SeitenFilled System Temperature Recorders & Recorder Controllers: SpecificationdencryNoch keine Bewertungen
- PCI Express Test Spec Platform 3.0 06182013 TSDokument383 SeitenPCI Express Test Spec Platform 3.0 06182013 TSDeng XinNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Oct2020 GCE Final PDFDokument30 SeitenOct2020 GCE Final PDFGavinNoch keine Bewertungen
- T. Murugan: Post Applied For Well Testing OperatorDokument5 SeitenT. Murugan: Post Applied For Well Testing Operatorjohn MNoch keine Bewertungen
- Vr31a OmDokument5 SeitenVr31a OmrudydanielleNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Linux Overview (Commands)Dokument9 SeitenLinux Overview (Commands)fopataNoch keine Bewertungen
- Intermed Products: International CatalogueDokument12 SeitenIntermed Products: International CatalogueRicardo Bonetti TadenNoch keine Bewertungen
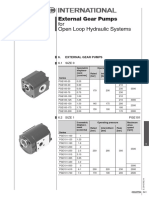
- External Gear Pumps For Open Loop Hydraulic SystemsDokument2 SeitenExternal Gear Pumps For Open Loop Hydraulic SystemsBlashko GjorgjievNoch keine Bewertungen
- Optimal Control Development System For ElectricalDokument7 SeitenOptimal Control Development System For ElectricalCRISTIAN CAMILO MORALES SOLISNoch keine Bewertungen
- Extenso MeterDokument8 SeitenExtenso MeterVijayanandh Raja100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Exercicios de PhonicsDokument51 SeitenExercicios de Phonicsms. TeixeiraNoch keine Bewertungen
- Flotech Corporate FlyerDokument6 SeitenFlotech Corporate FlyerPrasetyo PNPNoch keine Bewertungen
- TA-Modulator EN LowDokument16 SeitenTA-Modulator EN Lowkap4enijNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)