Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Q Read: A Step by Step Guide To Learning How To Recite The Qur'an Book 1Dokument64 SeitenQ Read: A Step by Step Guide To Learning How To Recite The Qur'an Book 1Pakololo Biol100% (1)
- Nafta: North American Free Trade AggrementDokument16 SeitenNafta: North American Free Trade Aggrementanant saxena100% (8)
- Low Floor Bus DesignDokument10 SeitenLow Floor Bus DesignavinitsharanNoch keine Bewertungen
- A General Motors Case StudyDokument81 SeitenA General Motors Case StudyHamed KhazaeeNoch keine Bewertungen
- The Influence of Personal Innovativeness and Price Value On Intention To Use of Electric Vehicles in MalaysiaDokument12 SeitenThe Influence of Personal Innovativeness and Price Value On Intention To Use of Electric Vehicles in MalaysiaHamed KhazaeeNoch keine Bewertungen
- Crisis Financiera Formato NuevoDokument91 SeitenCrisis Financiera Formato NuevoHamed KhazaeeNoch keine Bewertungen
- wp94 5Dokument37 Seitenwp94 5Hamed KhazaeeNoch keine Bewertungen
- Suggested Solutions To Assignment 1 (OPTIONAL) : Part A True/ False/ Uncertain QuestionsDokument8 SeitenSuggested Solutions To Assignment 1 (OPTIONAL) : Part A True/ False/ Uncertain QuestionsHamed KhazaeeNoch keine Bewertungen
- Unit 6: Economic IndicatorsDokument6 SeitenUnit 6: Economic IndicatorsHamed KhazaeeNoch keine Bewertungen
- Simple Economics of Electric Vehicle AdoptionDokument10 SeitenSimple Economics of Electric Vehicle AdoptionHamed KhazaeeNoch keine Bewertungen
- Evolution of TAMDokument9 SeitenEvolution of TAMHamed KhazaeeNoch keine Bewertungen
- DELL Business Model KraemerDokument17 SeitenDELL Business Model KraemerSunny Chan100% (7)
- Dastin Brass: Cost Activity AnalysisDokument11 SeitenDastin Brass: Cost Activity AnalysisHamed Khazaee100% (1)
- Fundamental Equity Analysis & Recommandations - The Hang Seng Mainland 100 - 100 Largest Companies Which Derive The Majority of Their Sales Revenue From Mainland ChinaDokument205 SeitenFundamental Equity Analysis & Recommandations - The Hang Seng Mainland 100 - 100 Largest Companies Which Derive The Majority of Their Sales Revenue From Mainland ChinaQ.M.S Advisors LLCNoch keine Bewertungen
- Apollo Tyres and BKTDokument25 SeitenApollo Tyres and BKTKoushik G Sai100% (1)
- SAP S 4 HANA FI 1610 Overview Mindmap Edition PDFDokument2 SeitenSAP S 4 HANA FI 1610 Overview Mindmap Edition PDFkamranahmedaslamNoch keine Bewertungen
- Question Bank - AccountsDokument109 SeitenQuestion Bank - AccountsBhagwat YadavNoch keine Bewertungen
- Av1.0Dokument1 SeiteAv1.0Muhammad AbuBakarNoch keine Bewertungen
- Assignment of POMDokument4 SeitenAssignment of POMRajiv RanjanNoch keine Bewertungen
- Institutional Membership FormDokument2 SeitenInstitutional Membership Formdhruvi108Noch keine Bewertungen
- Form Property Tax ThaneDokument3 SeitenForm Property Tax ThaneMahendra More100% (1)
- FPEF ED 2017 Lo Res Pagination 002Dokument136 SeitenFPEF ED 2017 Lo Res Pagination 002klapperdopNoch keine Bewertungen
- Anta Tirta Kirana 1Dokument1 SeiteAnta Tirta Kirana 1yosi widianaNoch keine Bewertungen
- Tick DataDokument38 SeitenTick DataIstvan GergelyNoch keine Bewertungen
- Term Paper International EconomicsDokument5 SeitenTerm Paper International Economicsafmzkbysdbblih100% (1)
- Bankura TP ListDokument16 SeitenBankura TP ListDeb D Creative StudioNoch keine Bewertungen
- Human Capital and Economic Growth - Robert J BarroDokument18 SeitenHuman Capital and Economic Growth - Robert J BarroWalter Weber GimenezNoch keine Bewertungen
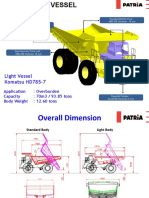
- Patria Light Vessel HD 785-7Dokument9 SeitenPatria Light Vessel HD 785-7bayu enasoraNoch keine Bewertungen
- Law As A Social SystemDokument20 SeitenLaw As A Social SystemcrmollNoch keine Bewertungen
- Research ProposalDokument2 SeitenResearch ProposalDinuka Malintha86% (7)
- Layman's Guide To Pair TradingDokument9 SeitenLayman's Guide To Pair TradingaporatNoch keine Bewertungen
- 6.1 Government of Pakistan's Treasury Bills: PeriodsDokument13 Seiten6.1 Government of Pakistan's Treasury Bills: PeriodsKidsNoch keine Bewertungen
- Ijcrt1704123 PDFDokument6 SeitenIjcrt1704123 PDFshivanand shuklaNoch keine Bewertungen
- What Are The Similarities and Differences Between Marshall Ian's and Hicks Ian Demand Functions ?Dokument2 SeitenWhat Are The Similarities and Differences Between Marshall Ian's and Hicks Ian Demand Functions ?Zahra Malik100% (5)
- Module 2 - SumsDokument4 SeitenModule 2 - SumsShubakar ReddyNoch keine Bewertungen
- Click Here For Time Table of Fiitjee Tower, Sec-62, NoidaDokument6 SeitenClick Here For Time Table of Fiitjee Tower, Sec-62, NoidaRishav SinhaNoch keine Bewertungen
- Strategic Options For Building CompetitivenessDokument53 SeitenStrategic Options For Building Competitivenessjeet_singh_deepNoch keine Bewertungen
- An Economic Interpretation of The American RevolutionDokument31 SeitenAn Economic Interpretation of The American RevolutionShiva GuptaNoch keine Bewertungen
- Familydollar3yearstrategypptx 12731875821359 Phpapp02Dokument50 SeitenFamilydollar3yearstrategypptx 12731875821359 Phpapp02Rhenno LedhuardoNoch keine Bewertungen
- Estimates of District / Taluk Domestic Product and Its UseDokument44 SeitenEstimates of District / Taluk Domestic Product and Its UsearnabnitwNoch keine Bewertungen
- Idh 8 R 5Dokument30 SeitenIdh 8 R 5Quint WongNoch keine Bewertungen