Das könnte Ihnen auch gefallen
- Bead On Hoop PDFDokument26 SeitenBead On Hoop PDFShweta SridharNoch keine Bewertungen
- Coupled Instabilities in A Two-Bar Frame A QualitaDokument10 SeitenCoupled Instabilities in A Two-Bar Frame A QualitabenyfirstNoch keine Bewertungen
- RotationProject271 M9rehmaDokument10 SeitenRotationProject271 M9rehmaabdellatiftifa3333Noch keine Bewertungen
- Frame Dragging With Optical VorticesDokument13 SeitenFrame Dragging With Optical VorticesJames StrohaberNoch keine Bewertungen
- Dynamics - Rigid Body DynamicsDokument20 SeitenDynamics - Rigid Body DynamicsFelipe López GarduzaNoch keine Bewertungen
- L05 PolarDokument18 SeitenL05 PolarGuadalajara JaliscoNoch keine Bewertungen
- 3D Rigid Body KinematicsDokument10 Seiten3D Rigid Body KinematicsNachiket WadwankarNoch keine Bewertungen
- HW 2Dokument3 SeitenHW 2Prajita RoyNoch keine Bewertungen
- Journal of Mathematical Analysis and Applications: Ahmad T. Ali, Melih TurgutDokument11 SeitenJournal of Mathematical Analysis and Applications: Ahmad T. Ali, Melih TurgutYoselin GomezNoch keine Bewertungen
- A Simple Derivation of Lorentz Self-ForceDokument10 SeitenA Simple Derivation of Lorentz Self-ForceVeerareddy VippalaNoch keine Bewertungen
- 1 Direct Dynamics Newton Euler Equations of MotionDokument33 Seiten1 Direct Dynamics Newton Euler Equations of MotionAbhishek KumarNoch keine Bewertungen
- Problem Set VI Lagrangian DynamicsDokument4 SeitenProblem Set VI Lagrangian DynamicsDiego ForeroNoch keine Bewertungen
- Chapter 9 RotationDokument7 SeitenChapter 9 RotationHana Lee Jorel ZekeNoch keine Bewertungen
- Problem Set 6Dokument4 SeitenProblem Set 6James ConnaughtonNoch keine Bewertungen
- 01ParticleProblems PDFDokument10 Seiten01ParticleProblems PDFBarbaraNoch keine Bewertungen
- Mid Term Exam 2015: F θ − r (˙ϕ − ˙θ) = 0. − V + λ F F, λDokument2 SeitenMid Term Exam 2015: F θ − r (˙ϕ − ˙θ) = 0. − V + λ F F, λianuliNoch keine Bewertungen
- Dynamics of A Double Pendulum With Distributed MassDokument20 SeitenDynamics of A Double Pendulum With Distributed MassSalvador SilveyraNoch keine Bewertungen
- Spinning FieldDokument15 SeitenSpinning Fieldmkrinker1296100% (1)
- The Optimal Rolling of A Sphere, With Twisting But Without SlippingDokument36 SeitenThe Optimal Rolling of A Sphere, With Twisting But Without SlippingAmino fileNoch keine Bewertungen
- Research Article: Electromagnetic Gyroscopic MotionDokument15 SeitenResearch Article: Electromagnetic Gyroscopic MotionMuhammad Mohsin AslamNoch keine Bewertungen
- Dirac Equation ElectronDokument12 SeitenDirac Equation ElectronFranciscoNoch keine Bewertungen
- Yao-Xiong Huang: of ofDokument7 SeitenYao-Xiong Huang: of ofAnubhav LalNoch keine Bewertungen
- Stepny of The Ass Ques Oscillation 2Dokument28 SeitenStepny of The Ass Ques Oscillation 2Vinod Kumar KumarNoch keine Bewertungen
- EmonopolDokument3 SeitenEmonopolFlavio FontanaNoch keine Bewertungen
- Introduction:The Stability and Instability of Structural Elements in Offshore StructuresDokument6 SeitenIntroduction:The Stability and Instability of Structural Elements in Offshore Structuressudipta_chakraborty_78Noch keine Bewertungen
- N - Body Problem: L1 A3-401 - Newton's Law of GravitationDokument22 SeitenN - Body Problem: L1 A3-401 - Newton's Law of Gravitationudayang5330Noch keine Bewertungen
- Energy Momentum TensorDokument3 SeitenEnergy Momentum Tensorrgkelly62Noch keine Bewertungen
- CPH O2022 EnglishDokument16 SeitenCPH O2022 EnglishHieu Phung Cong100% (2)
- Wopho ProblemsDokument17 SeitenWopho Problemshantarto5844100% (1)
- A Unified Curvature Theory in Kinematic Mechanism PDFDokument7 SeitenA Unified Curvature Theory in Kinematic Mechanism PDFRohit GadekarNoch keine Bewertungen
- PC235W13 Assignment8 SolutionsDokument11 SeitenPC235W13 Assignment8 SolutionskwokNoch keine Bewertungen
- The Heavy Spring at Work: Amelia Carolina SparavignaDokument8 SeitenThe Heavy Spring at Work: Amelia Carolina SparavignaXaviSalvadorNoch keine Bewertungen
- ElastostaticDokument39 SeitenElastostaticibrodel22Noch keine Bewertungen
- VectorsDokument82 SeitenVectorsNaledi xuluNoch keine Bewertungen
- Free Flapping Vibration of Rotating Inclined Euler Beams: Chih-Ling Huang, Wen-Yi Lin, and Kuo-Mo HsiaoDokument7 SeitenFree Flapping Vibration of Rotating Inclined Euler Beams: Chih-Ling Huang, Wen-Yi Lin, and Kuo-Mo HsiaoquastardNoch keine Bewertungen
- Neutron Proton ScatteringDokument7 SeitenNeutron Proton ScatteringDebayan DasguptaNoch keine Bewertungen
- Representations of The Symmetry Group of SpacetimeDokument29 SeitenRepresentations of The Symmetry Group of SpacetimemarioasensicollantesNoch keine Bewertungen
- Rotational Motion: Rotation in Two Dimensions: A Particle On A RingDokument41 SeitenRotational Motion: Rotation in Two Dimensions: A Particle On A RingAdelia Ayu WandiraNoch keine Bewertungen
- PH563-Assignment Sheet 5 - 17 Oct 2019 Marked Problems To Be Submitted On 31st OctDokument2 SeitenPH563-Assignment Sheet 5 - 17 Oct 2019 Marked Problems To Be Submitted On 31st Octbhuppi KumarNoch keine Bewertungen
- Townsend, Quantum Physics, CHAP - 6, QM in 3DDokument33 SeitenTownsend, Quantum Physics, CHAP - 6, QM in 3DElcan DiogenesNoch keine Bewertungen
- Transient Dynamics of Laminated Beams, An Evaluation With A Higher-Order Refined TheoryDokument11 SeitenTransient Dynamics of Laminated Beams, An Evaluation With A Higher-Order Refined TheoryFAIZNoch keine Bewertungen
- HW 3Dokument2 SeitenHW 3leeynsnNoch keine Bewertungen
- Torsion PendulumDokument20 SeitenTorsion PendulumOmar ShamaylehNoch keine Bewertungen
- Modal Analysis of Rotating Shafts: A Body-Fixed Axis Formulation ApproachDokument16 SeitenModal Analysis of Rotating Shafts: A Body-Fixed Axis Formulation ApproachParthipan JayaramNoch keine Bewertungen
- MEN-351-criticl Speed-Manuscript 20181225Dokument8 SeitenMEN-351-criticl Speed-Manuscript 20181225laura villarroelNoch keine Bewertungen
- MTD of Determining Instability Regions Burney1971Dokument13 SeitenMTD of Determining Instability Regions Burney1971FAIZNoch keine Bewertungen
- S. Neukirch, G.H.M. Van Der Heijden and J.M.T. Thompson - Writhing Instabilities of Twisted Rods: From Infinite To Finite LengthDokument17 SeitenS. Neukirch, G.H.M. Van Der Heijden and J.M.T. Thompson - Writhing Instabilities of Twisted Rods: From Infinite To Finite LengthLokosooNoch keine Bewertungen
- Packets Kepler Elliptic Orbits: Quantum OnDokument4 SeitenPackets Kepler Elliptic Orbits: Quantum OnggutierrezdieckNoch keine Bewertungen
- Analysis of Flexible Multibody Systems With Spatial Beams Using Mixed Variational PrinciplesDokument20 SeitenAnalysis of Flexible Multibody Systems With Spatial Beams Using Mixed Variational PrinciplesnevinkoshyNoch keine Bewertungen
- Gauging Away Polarization States of WavesDokument5 SeitenGauging Away Polarization States of WavesJovan OdavicNoch keine Bewertungen
- Analytical Perturbative Approach To Periodic Orbits in The Homogeneous Quartic Oscillator PotentialDokument16 SeitenAnalytical Perturbative Approach To Periodic Orbits in The Homogeneous Quartic Oscillator PotentialAnonymous zRHb4R7CGdNoch keine Bewertungen
- Alexander Burinskii - Rotating Black Hole As Spinning ParticleDokument19 SeitenAlexander Burinskii - Rotating Black Hole As Spinning ParticleSteam29Noch keine Bewertungen
- PVVH Ab, Naa92, Ahn, (T Wy ,: de Physique Thporique 2, Cnrs Luminy, Case 907, 13288 Marseille Cedex 9, FranceDokument4 SeitenPVVH Ab, Naa92, Ahn, (T Wy ,: de Physique Thporique 2, Cnrs Luminy, Case 907, 13288 Marseille Cedex 9, FranceAngel EduardoNoch keine Bewertungen
- Physics 511: Electrodynamics Problem Set #6 Due Friday March 23Dokument5 SeitenPhysics 511: Electrodynamics Problem Set #6 Due Friday March 23Sergio VillaNoch keine Bewertungen
- T Area X EI T Area X EI: Theory I Deflection of Beams, Frames and Trusses Deflection of BeamsDokument6 SeitenT Area X EI T Area X EI: Theory I Deflection of Beams, Frames and Trusses Deflection of BeamsMelvin EsguerraNoch keine Bewertungen
- SW ModelDokument10 SeitenSW Modelcipcirip2010Noch keine Bewertungen
- Advances in Structure Research by Diffraction Methods: Fortschritte der Strukturforschung mit BeugungsmethodenVon EverandAdvances in Structure Research by Diffraction Methods: Fortschritte der Strukturforschung mit BeugungsmethodenR. BrillNoch keine Bewertungen
- Seminar on Micro-Local Analysis. (AM-93), Volume 93Von EverandSeminar on Micro-Local Analysis. (AM-93), Volume 93Noch keine Bewertungen
- A Course of Mathematics for Engineers and ScientistsVon EverandA Course of Mathematics for Engineers and ScientistsNoch keine Bewertungen
- PHD Shortlist - Catagory A, B, CDokument3 SeitenPHD Shortlist - Catagory A, B, CSandip MaityNoch keine Bewertungen
- On The Possibility of A Perfect Power Combiner: Sailing He and Kexin LiuDokument6 SeitenOn The Possibility of A Perfect Power Combiner: Sailing He and Kexin LiuSandip MaityNoch keine Bewertungen
- Designand Analysisofawideband PDFDokument5 SeitenDesignand Analysisofawideband PDFSandip MaityNoch keine Bewertungen
- Metamaterial Antenna Arrays For Improved Uniformity of Microwave Hyperthermia TreatmentsDokument12 SeitenMetamaterial Antenna Arrays For Improved Uniformity of Microwave Hyperthermia TreatmentsSandip MaityNoch keine Bewertungen
- Low-Profile On-Board Antenna With A Broad Beam Based On Three-Current ModelDokument12 SeitenLow-Profile On-Board Antenna With A Broad Beam Based On Three-Current ModelSandip MaityNoch keine Bewertungen
- Progress in Electromagnetics Research, Vol. 133, 91-115, 2013Dokument25 SeitenProgress in Electromagnetics Research, Vol. 133, 91-115, 2013Sandip MaityNoch keine Bewertungen
- Res Pre June2016 v2Dokument2 SeitenRes Pre June2016 v2Sandip MaityNoch keine Bewertungen
- A Simple Alternative For Beam Reconfiguration of Array Antennas F. AresDokument14 SeitenA Simple Alternative For Beam Reconfiguration of Array Antennas F. AresSandip MaityNoch keine Bewertungen
- Progress in Electromagnetics Research, Vol. 141, 17-32, 2013Dokument16 SeitenProgress in Electromagnetics Research, Vol. 141, 17-32, 2013Sandip MaityNoch keine Bewertungen
- 03 0203151 King MDokument19 Seiten03 0203151 King MSandip MaityNoch keine Bewertungen
- A Compact Pi-Structure Dual Band Transformer: Progress in Electromagnetics Research, PIER 88, 121-134, 2008Dokument14 SeitenA Compact Pi-Structure Dual Band Transformer: Progress in Electromagnetics Research, PIER 88, 121-134, 2008Sandip MaityNoch keine Bewertungen
- Blind Direction of Arrival Estimation of Coherent Sources Using Multi-Invariance Property X. Zhang, J. Yu, G. Feng, and D. XuDokument15 SeitenBlind Direction of Arrival Estimation of Coherent Sources Using Multi-Invariance Property X. Zhang, J. Yu, G. Feng, and D. XuSandip MaityNoch keine Bewertungen
- Progress in Electromagnetics Research, PIER 95, 19-38, 2009: Corresponding Author: F. Malek (Mfareq@unimap - Edu.my)Dokument20 SeitenProgress in Electromagnetics Research, PIER 95, 19-38, 2009: Corresponding Author: F. Malek (Mfareq@unimap - Edu.my)Sandip MaityNoch keine Bewertungen
- Progress in Electromagnetics Research, PIER 95, 309-327, 2009Dokument19 SeitenProgress in Electromagnetics Research, PIER 95, 309-327, 2009Sandip MaityNoch keine Bewertungen
- The Relativistic Proper-Velocity Transformation Group: Progress in Electromagnetics Research, PIER 60, 85-94, 2006Dokument10 SeitenThe Relativistic Proper-Velocity Transformation Group: Progress in Electromagnetics Research, PIER 60, 85-94, 2006Sandip MaityNoch keine Bewertungen
- Graphene-Based Infrared Lens With Tunable Focal Length: Yan Xiu Li, Fan Min Kong, and Kang LiDokument8 SeitenGraphene-Based Infrared Lens With Tunable Focal Length: Yan Xiu Li, Fan Min Kong, and Kang LiSandip MaityNoch keine Bewertungen
- Progress in Electromagnetics Research, PIER 95, 199-218, 2009Dokument20 SeitenProgress in Electromagnetics Research, PIER 95, 199-218, 2009Sandip MaityNoch keine Bewertungen
- Progress in Electromagnetics Research, Vol. 121, 225-247, 2011Dokument23 SeitenProgress in Electromagnetics Research, Vol. 121, 225-247, 2011Sandip MaityNoch keine Bewertungen
- Manual de Instruções John Deere D170 (56 Páginas)Dokument2 SeitenManual de Instruções John Deere D170 (56 Páginas)Antonio CostaNoch keine Bewertungen
- Ceramic Materials: Introduction!: MCEN90014: Materials ! ! !dr. K. Xia! ! ! !1!Dokument5 SeitenCeramic Materials: Introduction!: MCEN90014: Materials ! ! !dr. K. Xia! ! ! !1!hamalNoch keine Bewertungen
- PDRXDokument4 SeitenPDRXNeel AdwaniNoch keine Bewertungen
- Bloor Research On Data MigrationDokument13 SeitenBloor Research On Data MigrationivahdamNoch keine Bewertungen
- Lecture 1 - Intro and SolidWorks PCBDokument17 SeitenLecture 1 - Intro and SolidWorks PCBmyturtle gameNoch keine Bewertungen
- Writer Keyboard Shortcuts CheatsheetDokument1 SeiteWriter Keyboard Shortcuts CheatsheetBrian100% (3)
- Metalco Valve TianjinDokument20 SeitenMetalco Valve TianjinsathishNoch keine Bewertungen
- Maintenence SchedulingDokument4 SeitenMaintenence SchedulingCarloVanZyl0% (1)
- Hazard-Identification Dec 2015Dokument22 SeitenHazard-Identification Dec 2015Dumitru EninNoch keine Bewertungen
- 592-A2GA DesbloqueadoDokument27 Seiten592-A2GA DesbloqueadoVicktor GranadosNoch keine Bewertungen
- MTS Mto Ato Cto Eto PDFDokument5 SeitenMTS Mto Ato Cto Eto PDFJuan Villanueva ZamoraNoch keine Bewertungen
- A Research Paper On Design and Analysis of Shaftless Steam TurbineDokument5 SeitenA Research Paper On Design and Analysis of Shaftless Steam TurbineEditor IJTSRDNoch keine Bewertungen
- Mep Material Submittals LogDokument1 SeiteMep Material Submittals LogSanthosh KumarNoch keine Bewertungen
- 19 Element YagiDokument4 Seiten19 Element YagiVanessa BileNoch keine Bewertungen
- Wheels & BrakesDokument14 SeitenWheels & BrakesJoshua Saldana VélezNoch keine Bewertungen
- CPU SchedulingDokument30 SeitenCPU SchedulingHarsha OjhaNoch keine Bewertungen
- POH NAVAJO Pa-31Dokument438 SeitenPOH NAVAJO Pa-31Mantenimiento CMA68475% (4)
- Epi Gear 1 PDFDokument21 SeitenEpi Gear 1 PDFTrevaughn ParkinsonNoch keine Bewertungen
- DPR Guidelines Oil and Gas 2019 PDFDokument114 SeitenDPR Guidelines Oil and Gas 2019 PDFRubénNoch keine Bewertungen
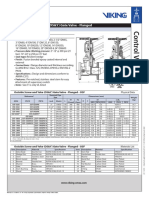
- Outside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesDokument2 SeitenOutside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesMark Louie GuintoNoch keine Bewertungen
- RAB PE20Tx1set Amo, 60HP (1) Cetakan 50kg (400 Balok 16 Can) + Ice Storage 50TDokument3 SeitenRAB PE20Tx1set Amo, 60HP (1) Cetakan 50kg (400 Balok 16 Can) + Ice Storage 50THidayat SyamsiNoch keine Bewertungen
- Advance Concrete PDFDokument33 SeitenAdvance Concrete PDFUdom RithNoch keine Bewertungen
- Tpa3110D2-Q1 15-W Filter-Free Stereo Class-D Audio Power Amplifier With Speakerguard™Dokument37 SeitenTpa3110D2-Q1 15-W Filter-Free Stereo Class-D Audio Power Amplifier With Speakerguard™tran anh tuanNoch keine Bewertungen
- Toshiba 42pw33q - S Ch. Pw33 SchematicsDokument18 SeitenToshiba 42pw33q - S Ch. Pw33 SchematicstodorloncarskiNoch keine Bewertungen
- Instrument Panel - Standard: 1988 Toyota CelicaDokument26 SeitenInstrument Panel - Standard: 1988 Toyota CelicaToua Yaj100% (1)
- Bends - Route SelectionDokument6 SeitenBends - Route SelectionanishsrNoch keine Bewertungen
- No35-Inclined Roof SystemDokument24 SeitenNo35-Inclined Roof SystemKitanovic NenadNoch keine Bewertungen
- Pakistani Radio MarketDokument72 SeitenPakistani Radio MarketNajeeb Anwar100% (1)
- Meinberg ManualDokument214 SeitenMeinberg ManualLeonard NicolaeNoch keine Bewertungen
- Section 1: Identification: TurpentineDokument10 SeitenSection 1: Identification: TurpentineRobertNoch keine Bewertungen