Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Hydraulic Structures C.D.smithDokument433 SeitenHydraulic Structures C.D.smithJekaterina SaboNoch keine Bewertungen
- Solutions and SolubilityDokument58 SeitenSolutions and SolubilityDarius Gan100% (3)
- DMCR Protection Relay For Oil TransformerDokument8 SeitenDMCR Protection Relay For Oil Transformerraul_bsuNoch keine Bewertungen
- Fabiola Cruz Lesson 4.1 - Electrons in Atoms - Light and Quantized EnergyDokument6 SeitenFabiola Cruz Lesson 4.1 - Electrons in Atoms - Light and Quantized EnergyFabiola Cruz0% (1)
- WTP (Water Treatment Plant) DesignDokument3 SeitenWTP (Water Treatment Plant) DesignPratiksha Pawar100% (1)
- Insulated Glass Unit: Why Window Techs Insulated BlindDokument2 SeitenInsulated Glass Unit: Why Window Techs Insulated BlindSuruthi DasanNoch keine Bewertungen
- 1-11 Accuracy and Repeatability of CPTDokument8 Seiten1-11 Accuracy and Repeatability of CPTPablo Cesar TrejoNoch keine Bewertungen
- Heat and Mass TransferDokument31 SeitenHeat and Mass TransferRavi RaneNoch keine Bewertungen
- Creep Behavior of Metals/AlloysDokument2 SeitenCreep Behavior of Metals/AlloysNitinSrivastavaNoch keine Bewertungen
- ME5204 2a - Cooling & Dehumidifying Coils - AppendixDokument5 SeitenME5204 2a - Cooling & Dehumidifying Coils - Appendixgattuso amberNoch keine Bewertungen
- Grade 9 Chapter 1 NotesDokument7 SeitenGrade 9 Chapter 1 NotestejveerNoch keine Bewertungen
- MEC-307 Design of Machine Element 6 Semester (3 Year) : Name: Chirag Shetty Urn No: 2020-B-26101996Dokument18 SeitenMEC-307 Design of Machine Element 6 Semester (3 Year) : Name: Chirag Shetty Urn No: 2020-B-26101996Siddharth SinghNoch keine Bewertungen
- WME01 01 Que 20180126 PDFDokument28 SeitenWME01 01 Que 20180126 PDFNewton JohnNoch keine Bewertungen
- (Woodhead Publishing Series in Welding and Other Joining Technologies 6) H. Granjon-Fundamentals of Welding Metallurgy-Woodhead Publishing (1991)Dokument227 Seiten(Woodhead Publishing Series in Welding and Other Joining Technologies 6) H. Granjon-Fundamentals of Welding Metallurgy-Woodhead Publishing (1991)Luis Testa75% (4)
- MSC Oil & Gas Structural Engineering Course Descriptors 2015-2016Dokument18 SeitenMSC Oil & Gas Structural Engineering Course Descriptors 2015-2016Xabi BarrenetxeaNoch keine Bewertungen
- Foundation Engineering. 02 Soil Compressibilty. Edited. 15 Feb 2020Dokument8 SeitenFoundation Engineering. 02 Soil Compressibilty. Edited. 15 Feb 2020sammy lopezNoch keine Bewertungen
- Basic Engineering ThermodynamicsDokument95 SeitenBasic Engineering Thermodynamicspapaye371275% (4)
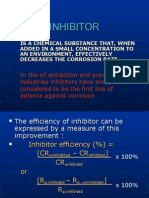
- Inhibitor CorrosionDokument21 SeitenInhibitor CorrosionDiego Pabon100% (2)
- Ball Joint Failure DocumentDokument2 SeitenBall Joint Failure DocumentAbeer Darhous100% (1)
- Dispersion SystemDokument25 SeitenDispersion Systempremkhandelwal147Noch keine Bewertungen
- FinalExam MEC3451 2015Dokument9 SeitenFinalExam MEC3451 2015siamak1438Noch keine Bewertungen
- Numerical Simulations of Mixed Convection in Liquid Metal Flow Within A Horizontal Pipe With Transverse Magnetic FieldDokument21 SeitenNumerical Simulations of Mixed Convection in Liquid Metal Flow Within A Horizontal Pipe With Transverse Magnetic Fieldhabo XuNoch keine Bewertungen
- Successful PSA of Dry PowdersDokument3 SeitenSuccessful PSA of Dry PowderssiswantoNoch keine Bewertungen
- G 179 - 04 - Rze3oq - PDFDokument5 SeitenG 179 - 04 - Rze3oq - PDFcaressaNoch keine Bewertungen
- Active Fast Cooling For Steam Turbines: FeaturesDokument2 SeitenActive Fast Cooling For Steam Turbines: FeaturesUsama JawaidNoch keine Bewertungen
- List of NDT EquipmentsDokument1 SeiteList of NDT EquipmentsAnandNoch keine Bewertungen
- sm1 014Dokument2 Seitensm1 014Paulo Henrique D. FavarettoNoch keine Bewertungen
- Physical Geography NotesDokument16 SeitenPhysical Geography NotesVernon88% (26)
- Manual de Operación Mini Sapray Dryer b290Dokument57 SeitenManual de Operación Mini Sapray Dryer b290Gustavo MoralesNoch keine Bewertungen