Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- 02 Technical 2D BrushlessSPM-MotorTutorialDokument97 Seiten02 Technical 2D BrushlessSPM-MotorTutorialpcg_liveNoch keine Bewertungen
- A1000 Catalogue (Overview)Dokument17 SeitenA1000 Catalogue (Overview)pcg_liveNoch keine Bewertungen
- Magnet - PMSM AnalysisDokument26 SeitenMagnet - PMSM Analysispcg_liveNoch keine Bewertungen
- Yoke Problem SetDokument3 SeitenYoke Problem Setpcg_liveNoch keine Bewertungen
- Loudspeaker Analysis - 2D/3D Magnetostatic: ResultsDokument3 SeitenLoudspeaker Analysis - 2D/3D Magnetostatic: Resultspcg_liveNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Storage Emulated 0 Android Data Com - Cv.docscanner Cache How-China-Engages-South-Asia-Themes-Partners-and-ToolsDokument140 SeitenStorage Emulated 0 Android Data Com - Cv.docscanner Cache How-China-Engages-South-Asia-Themes-Partners-and-Toolsrahul kumarNoch keine Bewertungen
- Cognitive ApprenticeshipDokument5 SeitenCognitive ApprenticeshipRandall RobertsNoch keine Bewertungen
- Simple Past TenselDokument3 SeitenSimple Past TenselPutra ViskellaNoch keine Bewertungen
- Ottley Sandra 2009Dokument285 SeitenOttley Sandra 2009Lucas Fariña AlheirosNoch keine Bewertungen
- Acfrogb0i3jalza4d2cm33ab0kjvfqevdmmcia - Kifkmf7zqew8tpk3ef Iav8r9j0ys0ekwrl4a8k7yqd0pqdr9qk1cpmjq Xx5x6kxzc8uq9it Zno Fwdrmyo98jelpvjb-9ahfdekf3cqptDokument1 SeiteAcfrogb0i3jalza4d2cm33ab0kjvfqevdmmcia - Kifkmf7zqew8tpk3ef Iav8r9j0ys0ekwrl4a8k7yqd0pqdr9qk1cpmjq Xx5x6kxzc8uq9it Zno Fwdrmyo98jelpvjb-9ahfdekf3cqptbbNoch keine Bewertungen
- 1 - HandBook CBBR4106Dokument29 Seiten1 - HandBook CBBR4106mkkhusairiNoch keine Bewertungen
- 4 Major Advantages of Japanese Education SystemDokument3 Seiten4 Major Advantages of Japanese Education SystemIsa HafizaNoch keine Bewertungen
- Cambridge English Key Sample Paper 1 Reading and Writing v2Dokument9 SeitenCambridge English Key Sample Paper 1 Reading and Writing v2kalinguer100% (1)
- D8.1M 2007PV PDFDokument5 SeitenD8.1M 2007PV PDFkhadtarpNoch keine Bewertungen
- Contracts 2 Special ContractsDokument11 SeitenContracts 2 Special ContractsAbhikaamNoch keine Bewertungen
- CH Folk Media and HeatlhDokument6 SeitenCH Folk Media and HeatlhRaghavendr KoreNoch keine Bewertungen
- Ad1 MCQDokument11 SeitenAd1 MCQYashwanth Srinivasa100% (1)
- Bagon-Taas Adventist Youth ConstitutionDokument11 SeitenBagon-Taas Adventist Youth ConstitutionJoseph Joshua A. PaLaparNoch keine Bewertungen
- Bab 3 - Soal-Soal No. 4 SD 10Dokument4 SeitenBab 3 - Soal-Soal No. 4 SD 10Vanni LimNoch keine Bewertungen
- 201606300437271127888362list of Prescribed Textbooks ISC 2017 PDFDokument10 Seiten201606300437271127888362list of Prescribed Textbooks ISC 2017 PDFShrimanta SatpatiNoch keine Bewertungen
- Spisak Gledanih Filmova Za 2012Dokument21 SeitenSpisak Gledanih Filmova Za 2012Mirza AhmetovićNoch keine Bewertungen
- Master Books ListDokument32 SeitenMaster Books ListfhaskellNoch keine Bewertungen
- Indus Valley Sites in IndiaDokument52 SeitenIndus Valley Sites in IndiaDurai IlasunNoch keine Bewertungen
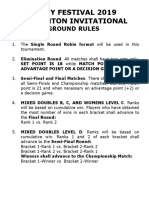
- Ground Rules 2019Dokument3 SeitenGround Rules 2019Jeremiah Miko LepasanaNoch keine Bewertungen
- Chapter 019Dokument28 SeitenChapter 019Esteban Tabares GonzalezNoch keine Bewertungen
- Leisure TimeDokument242 SeitenLeisure TimeArdelean AndradaNoch keine Bewertungen
- S - BlockDokument21 SeitenS - BlockRakshit Gupta100% (2)
- Invitation 2023Dokument10 SeitenInvitation 2023Joanna Marie Cruz FelipeNoch keine Bewertungen
- (Music of The African Diaspora) Robin D. Moore-Music and Revolution - Cultural Change in Socialist Cuba (Music of The African Diaspora) - University of California Press (2006) PDFDokument367 Seiten(Music of The African Diaspora) Robin D. Moore-Music and Revolution - Cultural Change in Socialist Cuba (Music of The African Diaspora) - University of California Press (2006) PDFGabrielNoch keine Bewertungen
- Economic Value Added in ComDokument7 SeitenEconomic Value Added in Comhareshsoni21Noch keine Bewertungen
- Los Documentos de La Dictadura Que Entregó Estados Unidos (Parte 2)Dokument375 SeitenLos Documentos de La Dictadura Que Entregó Estados Unidos (Parte 2)Todo NoticiasNoch keine Bewertungen
- Site Master S113C, S114C, S331C, S332C, Antenna, Cable and Spectrum AnalyzerDokument95 SeitenSite Master S113C, S114C, S331C, S332C, Antenna, Cable and Spectrum AnalyzerKodhamagulla SudheerNoch keine Bewertungen
- RWE Algebra 12 ProbStat Discrete Math Trigo Geom 2017 DVO PDFDokument4 SeitenRWE Algebra 12 ProbStat Discrete Math Trigo Geom 2017 DVO PDFハンター ジェイソンNoch keine Bewertungen
- ImpetigoDokument16 SeitenImpetigokikimasyhurNoch keine Bewertungen
- HRM and The Business EnvironmentDokument18 SeitenHRM and The Business Environmentsuzzette91Noch keine Bewertungen