Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- 6bk1200 0aa20 0aa0 Sicomp Imc 01s Siemens Panel ManualDokument130 Seiten6bk1200 0aa20 0aa0 Sicomp Imc 01s Siemens Panel Manualkarim100% (2)
- Project Management Case StudyDokument192 SeitenProject Management Case StudyMKPashaPashaNoch keine Bewertungen
- Unit-5 CeDokument19 SeitenUnit-5 Ce21R25A1202 DESETTY VINEETHNoch keine Bewertungen
- Lecture 3 - Chapter 005 - Clarifying The Research Question PDFDokument23 SeitenLecture 3 - Chapter 005 - Clarifying The Research Question PDFanhphamNoch keine Bewertungen
- Engr FT Intern W11 PDFDokument187 SeitenEngr FT Intern W11 PDFNilesh LambeNoch keine Bewertungen
- JOUR296 Homework Help 5Dokument6 SeitenJOUR296 Homework Help 5Evelinka ArmanovNoch keine Bewertungen
- GRE TunnelDokument14 SeitenGRE TunnelsachinkoenigNoch keine Bewertungen
- Using Genre Theory To Understand Internet Trolling in Various Online Communities: Representations of Wales in Transgressive Humour On The World Wide WebDokument8 SeitenUsing Genre Theory To Understand Internet Trolling in Various Online Communities: Representations of Wales in Transgressive Humour On The World Wide WebJonathan BishopNoch keine Bewertungen
- SAP Screen PersonasDokument9 SeitenSAP Screen Personasamaya100100Noch keine Bewertungen
- PotPlayer ShortcutDokument1 SeitePotPlayer Shortcutcolorado wildernessNoch keine Bewertungen
- Visionlink Api: Systems Overview Advantages Technical Overview Technical Support Frequently Asked QuestionsDokument6 SeitenVisionlink Api: Systems Overview Advantages Technical Overview Technical Support Frequently Asked QuestionsJoaquin Andres Boilet HuertaNoch keine Bewertungen
- Modeling Blast HeaveDokument14 SeitenModeling Blast HeavehamidNoch keine Bewertungen
- List of Experiments and Record of Progressive Assessment: Date of Performance Date of SubmissionDokument37 SeitenList of Experiments and Record of Progressive Assessment: Date of Performance Date of SubmissionIqbal HassanNoch keine Bewertungen
- Brother QL 600Dokument8 SeitenBrother QL 600Darnell WilliamsNoch keine Bewertungen
- Manual CPU AdjusterDokument11 SeitenManual CPU AdjusterAnonymous hQ6z6OBwNoch keine Bewertungen
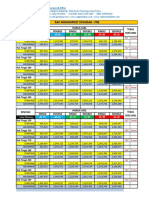
- Rak Minimarket Standar - P90: Single Double Single Double Single Double Rincian Harga Jual Tebal ShelvingDokument6 SeitenRak Minimarket Standar - P90: Single Double Single Double Single Double Rincian Harga Jual Tebal ShelvingAndi HadisaputraNoch keine Bewertungen
- Esp32-S2 Technical Reference Manual enDokument420 SeitenEsp32-S2 Technical Reference Manual enZafer AtakanNoch keine Bewertungen
- Ni ElvisDokument14 SeitenNi ElvisRinnoNoch keine Bewertungen
- Service Manual: Blu-Ray Disc Home TheaterDokument58 SeitenService Manual: Blu-Ray Disc Home Theaterboroda2410Noch keine Bewertungen
- "Blissfully Happy" or "Ready To Fight" Varying Interpretations of EmojiDokument10 Seiten"Blissfully Happy" or "Ready To Fight" Varying Interpretations of EmojiNadia B.Noch keine Bewertungen
- Geeta InstituteDokument7 SeitenGeeta Institutesdureja03Noch keine Bewertungen
- Available Translation AssignmentsDokument5 SeitenAvailable Translation AssignmentsIvana HristovaNoch keine Bewertungen
- RATAN CHANDRA ROY - CVDokument3 SeitenRATAN CHANDRA ROY - CVRatan RoyNoch keine Bewertungen
- Viettel 3G Project: Umts WcdmaDokument65 SeitenViettel 3G Project: Umts WcdmaTú Nguyễn NgọcNoch keine Bewertungen
- Answer The Following Questions: Course Specializationna Year Paper Code Bca-102 Subject Min. Marks Max. Marks DurationDokument1 SeiteAnswer The Following Questions: Course Specializationna Year Paper Code Bca-102 Subject Min. Marks Max. Marks DurationGajendra SinghNoch keine Bewertungen
- Python 03 ExercisesDokument5 SeitenPython 03 ExercisesSamuel SCNoch keine Bewertungen
- Ch02 1 Decision Modelling With Excel Part One Ver2 0506Dokument4 SeitenCh02 1 Decision Modelling With Excel Part One Ver2 0506Jai GaizinNoch keine Bewertungen
- Mini ServoDokument2 SeitenMini ServoShukri FaezNoch keine Bewertungen
- Autocad 2002Dokument188 SeitenAutocad 2002Alberto PérezNoch keine Bewertungen
- DS - Unit 5 - NotesDokument8 SeitenDS - Unit 5 - NotesManikyarajuNoch keine Bewertungen