Das könnte Ihnen auch gefallen
- 1 Mixing LectureDokument67 Seiten1 Mixing LectureMuntadher MahdiNoch keine Bewertungen
- General Principles of Bottomhole Pressure TestsDokument201 SeitenGeneral Principles of Bottomhole Pressure TestsDemzy Adeniyi92% (13)
- 320B Excavators One Way/One Pump Flow Third Pedal Straight Travel Hydraulic System - AttachmentDokument2 Seiten320B Excavators One Way/One Pump Flow Third Pedal Straight Travel Hydraulic System - Attachmentlalo11715Noch keine Bewertungen
- Hydraulic and Compressible Flow TurbomachinesDokument146 SeitenHydraulic and Compressible Flow TurbomachinesPaul Healy100% (3)
- Airfoil Aerodynamic OptimizationDokument140 SeitenAirfoil Aerodynamic Optimizationihv69Noch keine Bewertungen
- DESIGN of Pump Head-KiratpuraDokument18 SeitenDESIGN of Pump Head-KiratpuraJacob B Chacko100% (1)
- Wind Turbine Wake in Atmospheric TurbulenceDokument187 SeitenWind Turbine Wake in Atmospheric TurbulenceCore CoreNoch keine Bewertungen
- Ariane7 Mooring Analysis ManualDokument120 SeitenAriane7 Mooring Analysis ManualZulham Mochtar0% (1)
- MIT Introduction to Aerodynamics CourseDokument307 SeitenMIT Introduction to Aerodynamics CourseAnonymous PJp7tvGNoch keine Bewertungen
- GH Bladed Theory ManualDokument88 SeitenGH Bladed Theory ManualCFDiran.ir100% (2)
- Turbin Tesla PDFDokument99 SeitenTurbin Tesla PDFHaidar RahmanNoch keine Bewertungen
- Conceptual DesignDokument28 SeitenConceptual DesignDaniel JaimiNoch keine Bewertungen
- Control of Marine PropellersDokument322 SeitenControl of Marine PropellersPelmus LiviuNoch keine Bewertungen
- 2D Compressible Viscous-Flow Solver On Unstructured Meshes With Linear and Quadratic Reconstruction of Convective FluxesDokument77 Seiten2D Compressible Viscous-Flow Solver On Unstructured Meshes With Linear and Quadratic Reconstruction of Convective FluxeshityouNoch keine Bewertungen
- SPE Paper Erosional Rates Velocities1Dokument10 SeitenSPE Paper Erosional Rates Velocities1CH1253Noch keine Bewertungen
- CFD Study of A Wind Turbine RotorDokument83 SeitenCFD Study of A Wind Turbine Rotorfederico_malatesta100% (5)
- MSC Thesis RF JanssenDokument126 SeitenMSC Thesis RF JanssenunitedmanticoreNoch keine Bewertungen
- Handbook of Diffusion AtmosphereDokument110 SeitenHandbook of Diffusion AtmosphereElijah BaleyNoch keine Bewertungen
- 01 Why Do We Need Artificial LiftDokument55 Seiten01 Why Do We Need Artificial LiftReza Ramadhan0% (1)
- Propeller Wing Aerodynamic InterferenceDokument411 SeitenPropeller Wing Aerodynamic Interferencenamiresearch100% (1)
- Efficient Prediction of Dynamic Responses-DelftDokument178 SeitenEfficient Prediction of Dynamic Responses-DelfttompmathaiNoch keine Bewertungen
- Thrust Estimation and Control of Marine Propellers in Four-Quadrant OperationsDokument187 SeitenThrust Estimation and Control of Marine Propellers in Four-Quadrant OperationsSolartisNoch keine Bewertungen
- Lec 2 Fundamentals of Material BalancesDokument67 SeitenLec 2 Fundamentals of Material BalancesEli EliNoch keine Bewertungen
- ANALYSIS OF RANDOM WAVESDokument81 SeitenANALYSIS OF RANDOM WAVESjarodakd100% (1)
- Introduction To Thermofluids and Fluid MechanicsDokument38 SeitenIntroduction To Thermofluids and Fluid MechanicsFatehah Amani Razmi0% (1)
- CPP Chan Vit Bien Buoc PDFDokument335 SeitenCPP Chan Vit Bien Buoc PDFKhoai Sai GonNoch keine Bewertungen
- Forces Affecting ShipsDokument27 SeitenForces Affecting ShipsFelipe IlhaNoch keine Bewertungen
- Hydraulic Cartridges Seal KitsDokument18 SeitenHydraulic Cartridges Seal KitsSales AydinkayaNoch keine Bewertungen
- Thesis HemidaDokument47 SeitenThesis HemidaterreNoch keine Bewertungen
- Fluid Mechanics Lab Instructor Manual FinalDokument138 SeitenFluid Mechanics Lab Instructor Manual FinalMuhammad Ali100% (1)
- Structural Optimization of A Vertical Axis Wind Turbine With Aeroelastic AnalysisDokument162 SeitenStructural Optimization of A Vertical Axis Wind Turbine With Aeroelastic Analysispomoc.pri.izradi.radaNoch keine Bewertungen
- 5Dokument143 Seiten5mustafa11dahamNoch keine Bewertungen
- Development and Evaluation of Passive Variable-Pitch Vertical Axis Wind TurbinesDokument25 SeitenDevelopment and Evaluation of Passive Variable-Pitch Vertical Axis Wind Turbinessteinman1Noch keine Bewertungen
- 01louw Performance 2011 PDFDokument69 Seiten01louw Performance 2011 PDFsivakumar990Noch keine Bewertungen
- Actuator Disc Methods Applied To Wind Turbines: Robert MikkelsenDokument121 SeitenActuator Disc Methods Applied To Wind Turbines: Robert MikkelsenEsojzerepNoch keine Bewertungen
- Full Text 01Dokument112 SeitenFull Text 01சோ. இளமுகில்Noch keine Bewertungen
- Master Thesis Lorenzo CantoniDokument123 SeitenMaster Thesis Lorenzo Cantonidaniela.sanchez13Noch keine Bewertungen
- FULLTEXT01Dokument52 SeitenFULLTEXT01luka klaricNoch keine Bewertungen
- Funwave TVD 2.1 ManualDokument77 SeitenFunwave TVD 2.1 Manualmurali.5482Noch keine Bewertungen
- Aerodynamic Perfoamce of Wind TurbineDokument168 SeitenAerodynamic Perfoamce of Wind Turbinemondy.eg100% (2)
- Pablo Castillo R PDFDokument127 SeitenPablo Castillo R PDFkhazarhayatNoch keine Bewertungen
- DeAnna Sewell ThesisDokument69 SeitenDeAnna Sewell ThesisShokoofeAlaviNoch keine Bewertungen
- Dynamics of Floating Spars in Regular WavesDokument71 SeitenDynamics of Floating Spars in Regular WavesGagalo ILNoch keine Bewertungen
- 287980Dokument357 Seiten287980yashsaini020Noch keine Bewertungen
- Xuemei Zhu: A Higher-Order Panel Method For Third-Harmonic Diffraction ProblemsDokument123 SeitenXuemei Zhu: A Higher-Order Panel Method For Third-Harmonic Diffraction ProblemsndesigngmailNoch keine Bewertungen
- WholewholeDokument397 SeitenWholewholeMihai ApostoliuNoch keine Bewertungen
- Kite Anemometry Thesis FFFFFFDokument323 SeitenKite Anemometry Thesis FFFFFFMariela TisseraNoch keine Bewertungen
- Hot-Wire Anemometry of The Streamwise Vorticity On The Windward Surface of A Swept-Back CylinderDokument28 SeitenHot-Wire Anemometry of The Streamwise Vorticity On The Windward Surface of A Swept-Back CylinderAndyMirzaiNoch keine Bewertungen
- Wei Jun Zhu Mek FM Ep 2004 01Dokument105 SeitenWei Jun Zhu Mek FM Ep 2004 01com_truiseNoch keine Bewertungen
- Conduit Dynamics in Herand Power Plant NTNU ThesisDokument89 SeitenConduit Dynamics in Herand Power Plant NTNU ThesisRodrigo SaraivaNoch keine Bewertungen
- Modeling and Simulation of Multiphase/Multicomponent FlowsDokument150 SeitenModeling and Simulation of Multiphase/Multicomponent FlowsaegosmithNoch keine Bewertungen
- Ae-Analysis of Aero-Elastic Forces in Labyrinth Seals and The Design of An ExperimentalDokument154 SeitenAe-Analysis of Aero-Elastic Forces in Labyrinth Seals and The Design of An Experimentaljohn mtzNoch keine Bewertungen
- Wind Turbine DesignDokument21 SeitenWind Turbine DesignSundhar SivaNoch keine Bewertungen
- Wind Turbine DesignDokument21 SeitenWind Turbine DesignBoris SitorusNoch keine Bewertungen
- Wind Turbine Blade Analysis Using The Blade Element Momentum MethodDokument21 SeitenWind Turbine Blade Analysis Using The Blade Element Momentum MethodVicente Capistrán GómezNoch keine Bewertungen
- Wind Turbine Blade Analysis Using The Blade Element Momentum MethodDokument21 SeitenWind Turbine Blade Analysis Using The Blade Element Momentum MethodcsmistryNoch keine Bewertungen
- Wind Turbine DesignDokument21 SeitenWind Turbine DesignRicardo MartinsNoch keine Bewertungen
- Wind Turbine DesignDokument21 SeitenWind Turbine DesignMuhammad AamirNoch keine Bewertungen
- Wind Turbine DesignDokument21 SeitenWind Turbine DesignBoris SitorusNoch keine Bewertungen
- Corriente en Plasmas Disruptivos TesisDokument99 SeitenCorriente en Plasmas Disruptivos TesisJean LucNoch keine Bewertungen
- Investigation of The Wind Turbine Vortex StructureDokument11 SeitenInvestigation of The Wind Turbine Vortex StructureMohammed ArdyantNoch keine Bewertungen
- Airfoil Optimization - TU Delft Institutional Repository (PDFDrive)Dokument93 SeitenAirfoil Optimization - TU Delft Institutional Repository (PDFDrive)Aveek PalNoch keine Bewertungen
- MQ 36884Dokument199 SeitenMQ 36884careerNoch keine Bewertungen
- Dynamic Analysis of Multiple Body Floating Platforms Coupled With Mooring Lines and ReisersDokument223 SeitenDynamic Analysis of Multiple Body Floating Platforms Coupled With Mooring Lines and ReisersYoungtae KimNoch keine Bewertungen
- Experimental Analysis of Turbulence Effect Between Double Rotor Wind TurbineDokument53 SeitenExperimental Analysis of Turbulence Effect Between Double Rotor Wind TurbineJenifer CNoch keine Bewertungen
- The Investigation of Appropriate Control Algorithms For The Speed Control of Wind Turbine Hydrostatic SystemsDokument79 SeitenThe Investigation of Appropriate Control Algorithms For The Speed Control of Wind Turbine Hydrostatic SystemsHarika RaaviNoch keine Bewertungen
- Obj PDFDokument112 SeitenObj PDFAmanNoch keine Bewertungen
- RapportSTING CLémentNguyen PDFDokument41 SeitenRapportSTING CLémentNguyen PDFAnonymous 1fguovnNoch keine Bewertungen
- ThesisDokument209 SeitenThesisVedant DubeyNoch keine Bewertungen
- Lecture Notes For The Course in Water Wave MechanicsDokument117 SeitenLecture Notes For The Course in Water Wave MechanicsTolgaEnesYildırımNoch keine Bewertungen
- Exoplanetary Atmospheres: Theoretical Concepts and FoundationsVon EverandExoplanetary Atmospheres: Theoretical Concepts and FoundationsNoch keine Bewertungen
- Mechanical Characterization of Materials and Wave Dispersion: Instrumentation and Experiment InterpretationVon EverandMechanical Characterization of Materials and Wave Dispersion: Instrumentation and Experiment InterpretationYvon ChevalierNoch keine Bewertungen
- Hydrothermal Analysis in Engineering Using Control Volume Finite Element MethodVon EverandHydrothermal Analysis in Engineering Using Control Volume Finite Element MethodNoch keine Bewertungen
- Local Momentum Theory and Its Application To The Rotary WingDokument9 SeitenLocal Momentum Theory and Its Application To The Rotary WingaqstaxNoch keine Bewertungen
- Simulation of Wakes Behind Wind FarmsDokument79 SeitenSimulation of Wakes Behind Wind FarmsaqstaxNoch keine Bewertungen
- AE4613 Assignment 1Dokument6 SeitenAE4613 Assignment 1aqstaxNoch keine Bewertungen
- Photovolatics Developments: A Review On Intermediate Band Solar Cells-Underlying Concepts and Latest DevelopmentsDokument18 SeitenPhotovolatics Developments: A Review On Intermediate Band Solar Cells-Underlying Concepts and Latest DevelopmentsaqstaxNoch keine Bewertungen
- E3 Lab ReportDokument10 SeitenE3 Lab ReportaqstaxNoch keine Bewertungen
- Stereoselective Organic Reactions and Their ApplicationsDokument18 SeitenStereoselective Organic Reactions and Their ApplicationsaqstaxNoch keine Bewertungen
- Concept of Drag On Immersed BodiesDokument11 SeitenConcept of Drag On Immersed BodiesShourya SaraswatNoch keine Bewertungen
- ME6604-Gas Dynamics and Jet Propulsion PDFDokument12 SeitenME6604-Gas Dynamics and Jet Propulsion PDFNANCY JUDITHNoch keine Bewertungen
- Lecture - 3Dokument28 SeitenLecture - 3hassan baradaNoch keine Bewertungen
- Sophomore Study GuideDokument71 SeitenSophomore Study GuideSANSKAR AGRAWALNoch keine Bewertungen
- 07b.external ConvectionDokument12 Seiten07b.external ConvectionAbu YusufNoch keine Bewertungen
- Aerodynamic Aspects of The Final Design of The 1624 M Suspension Bridge Across The Great BeltDokument25 SeitenAerodynamic Aspects of The Final Design of The 1624 M Suspension Bridge Across The Great Beltlamkinpark3373Noch keine Bewertungen
- PumpsDokument75 SeitenPumpsmd junuNoch keine Bewertungen
- Pipe NetworkDokument20 SeitenPipe Networkamrezzat100% (1)
- K single impeller centrifugal pump data sheet comparisonDokument12 SeitenK single impeller centrifugal pump data sheet comparisonHoằng Phạm ĐứcNoch keine Bewertungen
- Air and Water Dynamics (Role in Sports)Dokument20 SeitenAir and Water Dynamics (Role in Sports)BerhanuNoch keine Bewertungen
- Fluids I I NotesDokument106 SeitenFluids I I Notesalireza domiriNoch keine Bewertungen
- Practice Questions - SolutionsDokument6 SeitenPractice Questions - SolutionsSteven KuaNoch keine Bewertungen
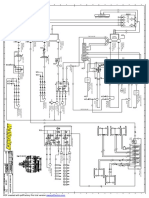
- Part 9 C38 Hydraulic Diagram REV002Dokument1 SeitePart 9 C38 Hydraulic Diagram REV002Fredy RoaNoch keine Bewertungen
- Study of Velocity Potential Function and Stream Function - Final PresentationDokument39 SeitenStudy of Velocity Potential Function and Stream Function - Final PresentationFarooq ShahNoch keine Bewertungen
- AGA Catalogue Mining 2011 Low ResDokument164 SeitenAGA Catalogue Mining 2011 Low ResjesusNoch keine Bewertungen
- 1 s2.0 S092422441730818X MainDokument18 Seiten1 s2.0 S092422441730818X MainTanakorn RachapilaNoch keine Bewertungen