Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- ScientistsDokument65 SeitenScientistsmohamed.zakaNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Idea of Multiple IntelligencesDokument2 SeitenThe Idea of Multiple IntelligencesSiti AisyahNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- BIOCHEM REPORT - OdtDokument16 SeitenBIOCHEM REPORT - OdtLingeshwarry JewarethnamNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Factor Causing Habitual Viewing of Pornographic MaterialDokument64 SeitenFactor Causing Habitual Viewing of Pornographic MaterialPretzjay BensigNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- TypeFinderReport ENFPDokument10 SeitenTypeFinderReport ENFPBassant AdelNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Zimbabwe Mag Court Rules Commentary Si 11 of 2019Dokument6 SeitenZimbabwe Mag Court Rules Commentary Si 11 of 2019Vusi BhebheNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Discussion #3: The Concept of Culture Learning ObjectivesDokument4 SeitenDiscussion #3: The Concept of Culture Learning ObjectivesJohn Lery SurellNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Statistical MethodsDokument4 SeitenStatistical MethodsYra Louisse Taroma100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Traps - 2008 12 30Dokument15 SeitenTraps - 2008 12 30smoothkat5Noch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
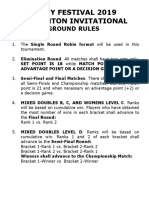
- Ground Rules 2019Dokument3 SeitenGround Rules 2019Jeremiah Miko LepasanaNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Peter Lehr Militant Buddhism The Rise of Religious Violence in Sri Lanka Myanmar and Thailand Springer International PDFDokument305 SeitenPeter Lehr Militant Buddhism The Rise of Religious Violence in Sri Lanka Myanmar and Thailand Springer International PDFIloviaaya RegitaNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- EELE 202 Lab 6 AC Nodal and Mesh Analysis s14Dokument8 SeitenEELE 202 Lab 6 AC Nodal and Mesh Analysis s14Nayr JTNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Update UI Components With NavigationUIDokument21 SeitenUpdate UI Components With NavigationUISanjay PatelNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Biofloc Technology (BFT) Water Quality, Biofloc Composition, and GrowthDokument8 SeitenThe Biofloc Technology (BFT) Water Quality, Biofloc Composition, and GrowthHafez MabroukNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Created By: Susan JonesDokument246 SeitenCreated By: Susan JonesdanitzavgNoch keine Bewertungen
- Aff Col MA Part IIDokument90 SeitenAff Col MA Part IIAkanksha DubeyNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- How To Create Partner Function in SAP ABAPDokument5 SeitenHow To Create Partner Function in SAP ABAPRommel SorengNoch keine Bewertungen
- Dan 440 Dace Art Lesson PlanDokument4 SeitenDan 440 Dace Art Lesson Planapi-298381373Noch keine Bewertungen
- Grade 7 1ST Quarter ExamDokument3 SeitenGrade 7 1ST Quarter ExamJay Haryl PesalbonNoch keine Bewertungen
- Supporting References in Release 12 SLA PDFDokument8 SeitenSupporting References in Release 12 SLA PDFsoireeNoch keine Bewertungen
- Bersin PredictionsDokument55 SeitenBersin PredictionsRahila Ismail Narejo100% (2)
- The Cognitive Enterprise For HCM in Retail Powered by Ibm and Oracle - 46027146USENDokument29 SeitenThe Cognitive Enterprise For HCM in Retail Powered by Ibm and Oracle - 46027146USENByte MeNoch keine Bewertungen
- Administrative LawDokument7 SeitenAdministrative LawNyameka PekoNoch keine Bewertungen
- Intrauterine Growth RestrictionDokument5 SeitenIntrauterine Growth RestrictionColleen MercadoNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Lesson Plan MP-2Dokument7 SeitenLesson Plan MP-2VeereshGodiNoch keine Bewertungen
- Grade 3Dokument4 SeitenGrade 3Shai HusseinNoch keine Bewertungen
- ChitsongChen, Signalsandsystems Afreshlook PDFDokument345 SeitenChitsongChen, Signalsandsystems Afreshlook PDFCarlos_Eduardo_2893Noch keine Bewertungen
- University of Dar Es Salaam MT 261 Tutorial 1Dokument4 SeitenUniversity of Dar Es Salaam MT 261 Tutorial 1Gilbert FuriaNoch keine Bewertungen
- Reported Speech Step by Step Step 7 Reported QuestionsDokument4 SeitenReported Speech Step by Step Step 7 Reported QuestionsDaniela TorresNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- D5 PROF. ED in Mastery Learning The DefinitionDokument12 SeitenD5 PROF. ED in Mastery Learning The DefinitionMarrah TenorioNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)