Das könnte Ihnen auch gefallen
- Tesis Master Silvia Monteagudo Viera PDFDokument188 SeitenTesis Master Silvia Monteagudo Viera PDFFrancisco Eckhardt ContrerasNoch keine Bewertungen
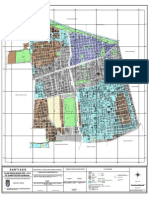
- Plano Zonificacion GeneralDokument1 SeitePlano Zonificacion GeneralFrancisco Eckhardt ContrerasNoch keine Bewertungen
- Manual Practico ETABSDokument28 SeitenManual Practico ETABSFrancisco Eckhardt Contreras100% (1)
- Tarea 1Dokument7 SeitenTarea 1Francisco Eckhardt ContrerasNoch keine Bewertungen
- Ejercicios para Tarea 1.1 Relaciones y Funciones DUVDokument4 SeitenEjercicios para Tarea 1.1 Relaciones y Funciones DUV4pcvbksb8tNoch keine Bewertungen
- Pca Matematica CuartoDokument19 SeitenPca Matematica Cuartoisabel garzonNoch keine Bewertungen
- Motivar para AprenderDokument47 SeitenMotivar para AprenderEiser EscobarNoch keine Bewertungen
- Taller #2Dokument9 SeitenTaller #2David ArevaloNoch keine Bewertungen
- Taller Algebra LinealDokument2 SeitenTaller Algebra LinealHan DarNoch keine Bewertungen
- Guía-Matemáticas-UNIDAD 0 - N°-EnterosDokument8 SeitenGuía-Matemáticas-UNIDAD 0 - N°-EnterosJacqueline JacquelineNoch keine Bewertungen
- Serie 4 CalculoDokument11 SeitenSerie 4 CalculoLeOnIx RoyalNoch keine Bewertungen
- Sistema de Numeración Maya y Números MayasDokument3 SeitenSistema de Numeración Maya y Números MayasJulio MastrascusaNoch keine Bewertungen
- DIVISIBILIDADDokument10 SeitenDIVISIBILIDADRonald Coello LánizNoch keine Bewertungen
- Taller de Evaluacion 4°Dokument6 SeitenTaller de Evaluacion 4°glenda bravoNoch keine Bewertungen
- Método de Newton ProgresivoDokument3 SeitenMétodo de Newton ProgresivoJairo Bazan chavezNoch keine Bewertungen
- Matematica Aplicada TR1Dokument8 SeitenMatematica Aplicada TR1Jean Pierre Zevallos100% (1)
- Quiz 2 - Semana 12 - CB - SEGUNDO BLOQUE-CALCULO III - (GRUPO1) PDFDokument6 SeitenQuiz 2 - Semana 12 - CB - SEGUNDO BLOQUE-CALCULO III - (GRUPO1) PDFmagaly urregoNoch keine Bewertungen
- Velocidad AngularDokument8 SeitenVelocidad Angularjuandeugarte100% (2)
- Mini Ensayo PotenciasDokument4 SeitenMini Ensayo PotenciasTebyoso Alarcon100% (1)
- Control Escrito 1° Fracciones.Dokument2 SeitenControl Escrito 1° Fracciones.Jose Zeballos BelmarNoch keine Bewertungen
- Comparacindefracciones 120108095500 Phpapp02Dokument40 SeitenComparacindefracciones 120108095500 Phpapp02AndersonQuitoSuarezNoch keine Bewertungen
- Ma470 202102 Cuaderno de Trabajo Unidad VDokument17 SeitenMa470 202102 Cuaderno de Trabajo Unidad VJessica CardenasNoch keine Bewertungen
- Informe Analisis de Error#1Dokument15 SeitenInforme Analisis de Error#1Gabriela VelandiaNoch keine Bewertungen
- Taller de Redaccion de Objetivos.Dokument11 SeitenTaller de Redaccion de Objetivos.sarai salinasNoch keine Bewertungen
- Ejercicios 4º ESO - 1 Bruño PDFDokument306 SeitenEjercicios 4º ESO - 1 Bruño PDFwww.ATENSALUD.comNoch keine Bewertungen
- Planificacion Clase A Clase Octubre 91024 20181017 20170912 100027Dokument7 SeitenPlanificacion Clase A Clase Octubre 91024 20181017 20170912 100027gladysNoch keine Bewertungen
- MaterialesDokument30 SeitenMaterialesJulián VelascoNoch keine Bewertungen
- Fermat Betancourt HYSL2 PDFDokument22 SeitenFermat Betancourt HYSL2 PDFFermat BetancourtNoch keine Bewertungen
- Clase de Fundamentación Matemática ITFIP (08-03-2021) Con Solución de Los EjerciciosDokument30 SeitenClase de Fundamentación Matemática ITFIP (08-03-2021) Con Solución de Los EjerciciosNESTOR ALEXANDER HERNANDEZ MORENONoch keine Bewertungen
- Ejercicios Ecuaciones Lineales: Sergiman Div Ecu1Dokument2 SeitenEjercicios Ecuaciones Lineales: Sergiman Div Ecu1Ronald MoraNoch keine Bewertungen
- La Regresión Lineal para Pronosticar La DemandaDokument7 SeitenLa Regresión Lineal para Pronosticar La DemandaDaniel SalinasNoch keine Bewertungen
- Secme 16416Dokument20 SeitenSecme 16416Hugo Alfredo BenitezNoch keine Bewertungen
- Guía - 8 - Productos de Binomio Con Un Término en ComúnDokument1 SeiteGuía - 8 - Productos de Binomio Con Un Término en ComúnflorenciaNoch keine Bewertungen
- TrigonometríaDokument22 SeitenTrigonometríaCarlos Alberto Colque GarciaNoch keine Bewertungen