Das könnte Ihnen auch gefallen
- Cse Ade Lab Manual 2016Dokument70 SeitenCse Ade Lab Manual 2016Deepak SalianNoch keine Bewertungen
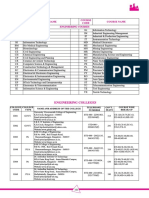
- Seatmatrix EnggDokument6 SeitenSeatmatrix EnggHarshith LaxmanNoch keine Bewertungen
- 1083796829-Preview File - Engineer Tech Support Level - 1 FGDokument16 Seiten1083796829-Preview File - Engineer Tech Support Level - 1 FGanaparthi naveenNoch keine Bewertungen
- Technical Support User GuideDokument13 SeitenTechnical Support User GuideDeepak SalianNoch keine Bewertungen
- Engineering 5Dokument20 SeitenEngineering 5Deepak SalianNoch keine Bewertungen
- Maths Set 2 EnglishDokument8 SeitenMaths Set 2 EnglishDeepak SalianNoch keine Bewertungen
- Aptitude2015 PDFDokument50 SeitenAptitude2015 PDFmanjus46Noch keine Bewertungen
- Anual Modern Digital Signal Processing by Roberto Christ IDokument187 SeitenAnual Modern Digital Signal Processing by Roberto Christ IDeepak SalianNoch keine Bewertungen
- Jan 2014Dokument2 SeitenJan 2014Deepak SalianNoch keine Bewertungen
- Cse Ade Lab Manual 2016Dokument70 SeitenCse Ade Lab Manual 2016Deepak SalianNoch keine Bewertungen
- Visvesvaraya Technological University, BelagaviDokument29 SeitenVisvesvaraya Technological University, BelagaviRaghavendra ShettyNoch keine Bewertungen
- Revised Power Electronics Lab Manual 26.11.14Dokument46 SeitenRevised Power Electronics Lab Manual 26.11.14Deepak SalianNoch keine Bewertungen
- Jain College: Date: Dec-2017 Subject: Statistics I Puc Mock Timings Allowed: 3Hrs. Total Marks: 100Dokument4 SeitenJain College: Date: Dec-2017 Subject: Statistics I Puc Mock Timings Allowed: 3Hrs. Total Marks: 100Deepak SalianNoch keine Bewertungen
- DC Assignment09 PDFDokument3 SeitenDC Assignment09 PDFDeepak SalianNoch keine Bewertungen
- Spin Tronic SDokument28 SeitenSpin Tronic SDeepak SalianNoch keine Bewertungen
- Cse Ade Lab Manual 2016Dokument70 SeitenCse Ade Lab Manual 2016AnnalakshmiNoch keine Bewertungen
- Choice Based Credit System (CBCS) Regulations Governing The Degree of Bachelor of Engineering / Technology (B.E./B.Tech.)Dokument16 SeitenChoice Based Credit System (CBCS) Regulations Governing The Degree of Bachelor of Engineering / Technology (B.E./B.Tech.)Deepak SalianNoch keine Bewertungen
- Ectc 4 SyllDokument18 SeitenEctc 4 SyllDeepak SalianNoch keine Bewertungen
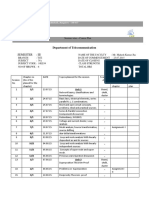
- Na Lesson PlanDokument4 SeitenNa Lesson PlanDeepak SalianNoch keine Bewertungen
- Guidelines CSS ScholarshipDokument15 SeitenGuidelines CSS Scholarshipmoorthymtps_54120305Noch keine Bewertungen
- DC Assignment09 PDFDokument3 SeitenDC Assignment09 PDFDeepak SalianNoch keine Bewertungen
- Celebrating International Women's Day achievementsDokument1 SeiteCelebrating International Women's Day achievementsDeepak SalianNoch keine Bewertungen
- Milling GrindingDokument16 SeitenMilling GrindingDeepak SalianNoch keine Bewertungen
- RRR 1Dokument3 SeitenRRR 1Deepak SalianNoch keine Bewertungen
- Behavioral InterviewDokument4 SeitenBehavioral InterviewDeepak SalianNoch keine Bewertungen
- Miniature Robotic Hand For Object DisposalDokument16 SeitenMiniature Robotic Hand For Object DisposalDeepak SalianNoch keine Bewertungen
- Ofdm Example TipsDokument7 SeitenOfdm Example TipsDeepak SalianNoch keine Bewertungen
- Ece Viii Wireless Communication (10ec81) NotesDokument108 SeitenEce Viii Wireless Communication (10ec81) NotesDeepak Salian0% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5782)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Anushi Project-House Price PredictionDokument26 SeitenAnushi Project-House Price PredictionAnushi100% (1)
- Risk Factor of Adolescent AggressionDokument9 SeitenRisk Factor of Adolescent AggressionAsih Nor ZahidahNoch keine Bewertungen
- Heat Engines ExplainedDokument3 SeitenHeat Engines ExplainedMaria Sophia Prado67% (3)
- J Agric Food Chem 2014 - 62 PP 5827-5834Dokument8 SeitenJ Agric Food Chem 2014 - 62 PP 5827-5834Jorge GarayNoch keine Bewertungen
- Dr. Sarah M. Toman NULL, Dr. Ansel L. Woldt NULL - Gestalt Therapy - History, Theory, and Practice-SAGE Publications, Inc (2005)Dokument425 SeitenDr. Sarah M. Toman NULL, Dr. Ansel L. Woldt NULL - Gestalt Therapy - History, Theory, and Practice-SAGE Publications, Inc (2005)Manja K100% (1)
- Mental Health Care, Rom and Positioning (Assignments)Dokument4 SeitenMental Health Care, Rom and Positioning (Assignments)Agita FadillaNoch keine Bewertungen
- Land Rights Regulations SummaryDokument4 SeitenLand Rights Regulations SummaryBaraka Francis100% (1)
- Thermochemistry: - Petrucci, Herring Madura and BissonnetteDokument49 SeitenThermochemistry: - Petrucci, Herring Madura and BissonnetteYousif Khalid100% (1)
- EDU 610: Differentiation Theory and Strategies Final ProjectDokument13 SeitenEDU 610: Differentiation Theory and Strategies Final ProjectCarrie RohrerNoch keine Bewertungen
- Slurry Property - MeasurementDokument60 SeitenSlurry Property - MeasurementNandaKishorePatraNoch keine Bewertungen
- Penyelidikan Tindakan ModelDokument10 SeitenPenyelidikan Tindakan ModelramachandranipthoNoch keine Bewertungen
- Hidden Risks by Nicholas Taleb NassibDokument276 SeitenHidden Risks by Nicholas Taleb NassibAugustin Presecan100% (1)
- FASID Table Provides MET Service Requirements for AerodromesDokument31 SeitenFASID Table Provides MET Service Requirements for Aerodromesdenys galvanNoch keine Bewertungen
- March 2009 Compiled PDFDokument48 SeitenMarch 2009 Compiled PDFgoodwindNoch keine Bewertungen
- Accenture Life Trends 2024 ReportDokument56 SeitenAccenture Life Trends 2024 ReportirgalyanoNoch keine Bewertungen
- Equipment Calibration/Maintenance: APPENDIX D - USFWS QA Program (5/04)Dokument5 SeitenEquipment Calibration/Maintenance: APPENDIX D - USFWS QA Program (5/04)Defry Farhandinata100% (1)
- CIEHF The Human Connection IIDokument44 SeitenCIEHF The Human Connection IIHuber AponteNoch keine Bewertungen
- Pulse 4 EndDokument20 SeitenPulse 4 EndCristina Garcia100% (2)
- Cordless Power ControllerDokument4 SeitenCordless Power ControllerMahêshwär Rêððý BobbaNoch keine Bewertungen
- Symbols Mechanical and Elements: Acoustical As Schematic DiagramsDokument25 SeitenSymbols Mechanical and Elements: Acoustical As Schematic Diagramsamine bouizarNoch keine Bewertungen
- Math ManipulativeDokument8 SeitenMath Manipulativeapi-351940093Noch keine Bewertungen
- Turbulent Pipe Flow TutorialDokument37 SeitenTurbulent Pipe Flow Tutorialcheh han seumNoch keine Bewertungen
- Inches to cm conversion chartDokument1 SeiteInches to cm conversion chartfrykadelleNoch keine Bewertungen
- Science, Technology and Society: Jison, Arianne Marterio, Gill Bsba FM 3Dokument11 SeitenScience, Technology and Society: Jison, Arianne Marterio, Gill Bsba FM 3superhoonieNoch keine Bewertungen
- 01 Strategy BIS WS0304 Ds18 1FpSDokument94 Seiten01 Strategy BIS WS0304 Ds18 1FpSLong YaoNoch keine Bewertungen
- Social - Emotional LearningDokument10 SeitenSocial - Emotional Learningapi-535391771Noch keine Bewertungen
- Betas de NeobuxDokument9 SeitenBetas de NeobuxYonaiker RivasNoch keine Bewertungen
- Full Download Ebook Ebook PDF Media and Communication in Canada Networks Culture Technology Audience Ninth 9th Edition PDFDokument42 SeitenFull Download Ebook Ebook PDF Media and Communication in Canada Networks Culture Technology Audience Ninth 9th Edition PDFlillie.christopher194100% (38)
- BS en 00437-2003 + A1-2009 PDFDokument46 SeitenBS en 00437-2003 + A1-2009 PDFShan Sandaruwan AbeywardeneNoch keine Bewertungen