Das könnte Ihnen auch gefallen
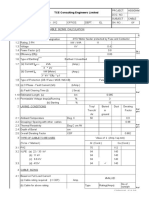
- Cable Sizing CalculationDokument72 SeitenCable Sizing CalculationHARI my songs100% (1)
- Control Systems - LECTURE NOTESDokument132 SeitenControl Systems - LECTURE NOTESgutha manikantaNoch keine Bewertungen
- Quantities Survey MethodsDokument73 SeitenQuantities Survey MethodsparvezNoch keine Bewertungen
- Control Systems PDFDokument133 SeitenControl Systems PDFShaboddinNoch keine Bewertungen
- Substations - Part 1 - Procedural: DisclaimerDokument44 SeitenSubstations - Part 1 - Procedural: DisclaimerSergio Henrique F. CArniettoNoch keine Bewertungen
- Elementary Surveying Problem Set 2 q1Dokument2 SeitenElementary Surveying Problem Set 2 q1soontobengineer50% (2)
- Four Bolt Unstiffened End PlateDokument7 SeitenFour Bolt Unstiffened End PlateRnD2013Noch keine Bewertungen
- Singular Perturbation Methods in Control Analysis and Design Classics in Applied MathematicsDokument388 SeitenSingular Perturbation Methods in Control Analysis and Design Classics in Applied MathematicsTran Trung Thanh100% (2)
- Optimal Control: Linear Quadratic MethodsVon EverandOptimal Control: Linear Quadratic MethodsBewertung: 4 von 5 Sternen4/5 (2)
- Jawaharlal Nehru Technological University II Year B.Tech. ECE. Il-Sem T P 0 C Control SystemsDokument1 SeiteJawaharlal Nehru Technological University II Year B.Tech. ECE. Il-Sem T P 0 C Control SystemsappuamreddyNoch keine Bewertungen
- Ec1304 Control Systems 3 1 0 100Dokument1 SeiteEc1304 Control Systems 3 1 0 100Anupama RaghavendranNoch keine Bewertungen
- Ec1304control SystemsDokument2 SeitenEc1304control SystemsKanishka MageshwaranNoch keine Bewertungen
- Control System EngineeringDokument2 SeitenControl System EngineeringGokulNoch keine Bewertungen
- Syllabus Control Systems ECE R13Dokument2 SeitenSyllabus Control Systems ECE R13tansnvarmaNoch keine Bewertungen
- Lecture NotesDokument70 SeitenLecture NotesPrathamraj ChauhanNoch keine Bewertungen
- E2 Linear Control Systems SyllabusDokument2 SeitenE2 Linear Control Systems SyllabussasikalaNoch keine Bewertungen
- Control SystemsDokument2 SeitenControl SystemsAbhishek KumarNoch keine Bewertungen
- Bput Mtech MSDD 2010Dokument17 SeitenBput Mtech MSDD 2010chandan_j4uNoch keine Bewertungen
- Control SystemDokument13 SeitenControl SystemSreeram PanigrahiNoch keine Bewertungen
- Control System Ece QB EeeeeeeDokument73 SeitenControl System Ece QB EeeeeeeARNI JAYACHANDRANoch keine Bewertungen
- Control System EngineeringDokument2 SeitenControl System EngineeringVASANTHKUMAR M SNoch keine Bewertungen
- Department of Electronics and Communication Lesson Plan: TH NDDokument4 SeitenDepartment of Electronics and Communication Lesson Plan: TH NDshadiqengineer0% (1)
- CS SyllabusDokument2 SeitenCS SyllabusEEE ACEECNoch keine Bewertungen
- WWW - Srmuniv.ac - in Downloads Eee-Curriculam 2009onwardsDokument2 SeitenWWW - Srmuniv.ac - in Downloads Eee-Curriculam 2009onwardsvishiwizardNoch keine Bewertungen
- 17EI3501 - Control Systems: Upon Successful Completion of The Course, The Student Will Be Able ToDokument3 Seiten17EI3501 - Control Systems: Upon Successful Completion of The Course, The Student Will Be Able Toniteesh kumarNoch keine Bewertungen
- Ee259 Control Systems Credits: 3:1:0 Unit I IntroductionDokument1 SeiteEe259 Control Systems Credits: 3:1:0 Unit I IntroductionPraharsha Vardhan ReddyNoch keine Bewertungen
- CS R-16 SyllabusDokument3 SeitenCS R-16 SyllabusSai tejaswiNoch keine Bewertungen
- Control Unit 1Dokument37 SeitenControl Unit 1AnshNoch keine Bewertungen
- Courses of Study: T. Y. B. Tech. (Instrumentation) For The Batch Registering in 2006-07Dokument20 SeitenCourses of Study: T. Y. B. Tech. (Instrumentation) For The Batch Registering in 2006-07Vaibhav SinghNoch keine Bewertungen
- Control System Lecture PlanDokument3 SeitenControl System Lecture PlanGulzar AhamdNoch keine Bewertungen
- Adavanced Control SystemsDokument1 SeiteAdavanced Control SystemsscribdcurrenttextNoch keine Bewertungen
- Modern Control TheoryDokument137 SeitenModern Control TheorypragatinareshNoch keine Bewertungen
- Automatic Control (ME1401)Dokument2 SeitenAutomatic Control (ME1401)Mehroos AliNoch keine Bewertungen
- EC6405 Control System EngineeringDokument1 SeiteEC6405 Control System EngineeringSaravanan PazapughalNoch keine Bewertungen
- 2 EE303 Linear Control SystemsDokument2 Seiten2 EE303 Linear Control SystemsJeril joseNoch keine Bewertungen
- Feedback Control System SyllabusDokument3 SeitenFeedback Control System SyllabusDamanMakhijaNoch keine Bewertungen
- Control System EngineeringDokument3 SeitenControl System Engineeringnisarg0% (1)
- Ee2365 LPDokument3 SeitenEe2365 LPAshu ToshNoch keine Bewertungen
- Control SyllabusDokument2 SeitenControl SyllabusAlakshendra JohariNoch keine Bewertungen
- EE484 Control SystemsDokument2 SeitenEE484 Control Systemssaheedahmd0112Noch keine Bewertungen
- Control SystemsDokument2 SeitenControl SystemsrahulwasthereNoch keine Bewertungen
- Ec 1304 Control SystemsDokument2 SeitenEc 1304 Control SystemsMohamed Abdul RahimNoch keine Bewertungen
- Control Systems NotesDokument74 SeitenControl Systems NotesNirjal RanipaNoch keine Bewertungen
- CTRL SysDokument74 SeitenCTRL SysRitwik RoyNoch keine Bewertungen
- Control System EngineeringDokument2 SeitenControl System EngineeringmaheshNoch keine Bewertungen
- Ec6405control System Engineering SyllabusDokument2 SeitenEc6405control System Engineering SyllabusmaheshboobalanNoch keine Bewertungen
- Ec 321Dokument2 SeitenEc 321Shashank KumarNoch keine Bewertungen
- Control Systems r13 MtechDokument24 SeitenControl Systems r13 MtechSal ExcelNoch keine Bewertungen
- Cont Sys SyllabusDokument1 SeiteCont Sys Syllabuskavithakumar87Noch keine Bewertungen
- Control Systems EngineeringDokument2 SeitenControl Systems EngineeringSaurabhBisht67% (3)
- Chilukuri Rajesh 08501A0222: Unit - Ii Electric HeatingDokument9 SeitenChilukuri Rajesh 08501A0222: Unit - Ii Electric HeatingChilukuri RajeshNoch keine Bewertungen
- Control System - Lesson PlanDokument7 SeitenControl System - Lesson PlanNarasimman DonNoch keine Bewertungen
- Ec 8391 Cs Auqp Merged 8.5.19Dokument31 SeitenEc 8391 Cs Auqp Merged 8.5.19sivaNoch keine Bewertungen
- CSD Syllabus COsDokument2 SeitenCSD Syllabus COsBharath PulavarthiNoch keine Bewertungen
- CSEDokument2 SeitenCSESumit KhuranaNoch keine Bewertungen
- Theory Iso Control SystemsDokument36 SeitenTheory Iso Control SystemsrevathisenthilNoch keine Bewertungen
- Gujarat Technological University Biomedical EngineeringDokument3 SeitenGujarat Technological University Biomedical EngineeringMandy745Noch keine Bewertungen
- M.Tech. Power Systems & Automation PDFDokument17 SeitenM.Tech. Power Systems & Automation PDFPavan KumarNoch keine Bewertungen
- M.Tech PSADokument17 SeitenM.Tech PSASwathi AllipilliNoch keine Bewertungen
- IC301 Control Engineering-IDokument3 SeitenIC301 Control Engineering-IAKSHAY KRISHNA K RNoch keine Bewertungen
- Jntuk Eee 4-2 Sem Syllabus Book (R10)Dokument23 SeitenJntuk Eee 4-2 Sem Syllabus Book (R10)Venkat KickNoch keine Bewertungen
- TextbooksDokument2 SeitenTextbooksSurya RNoch keine Bewertungen
- Chhattisgarh Swami Vivekanand Technical University, BhilaiDokument25 SeitenChhattisgarh Swami Vivekanand Technical University, BhilaiPiyush KumarNoch keine Bewertungen
- The Stability of Input-Output Dynamical SystemsVon EverandThe Stability of Input-Output Dynamical SystemsBewertung: 3 von 5 Sternen3/5 (1)
- Tt423 Apparel Production Technology: Course OutcomesDokument2 SeitenTt423 Apparel Production Technology: Course OutcomesVenkatesh GogineniNoch keine Bewertungen
- Machine Needles: Needle SizesDokument2 SeitenMachine Needles: Needle SizesVenkatesh GogineniNoch keine Bewertungen
- Card Sliver Brochure PDFDokument8 SeitenCard Sliver Brochure PDFVenkatesh Gogineni100% (1)
- Goodwill Industries of Western New YorkDokument34 SeitenGoodwill Industries of Western New YorkVenkatesh GogineniNoch keine Bewertungen
- F 8670898 Gate 2009Dokument14 SeitenF 8670898 Gate 2009Venkatesh GogineniNoch keine Bewertungen
- Viraha Vedana: BY (Sarath - Geee) Feedback:-Eee - Rvr2012@chowdavaram - inDokument1 SeiteViraha Vedana: BY (Sarath - Geee) Feedback:-Eee - Rvr2012@chowdavaram - inVenkatesh GogineniNoch keine Bewertungen
- PDF Created With Pdffactory Pro Trial Version: SL - No Marks Mid NoDokument2 SeitenPDF Created With Pdffactory Pro Trial Version: SL - No Marks Mid NoVenkatesh GogineniNoch keine Bewertungen
- Chapter - Four Soil Permeability and SeepageDokument19 SeitenChapter - Four Soil Permeability and SeepageBefkadu KurtaileNoch keine Bewertungen
- Lecture 2: Stacks and Queues: CSE 373: Data Structures and AlgorithmsDokument31 SeitenLecture 2: Stacks and Queues: CSE 373: Data Structures and AlgorithmsTawsifNoch keine Bewertungen
- Case Study Class 12 Physics ImportantDokument5 SeitenCase Study Class 12 Physics Importantdivanshu2006yadavNoch keine Bewertungen
- Chapter 1: Coding Decoding: Important Note: It Is Good To Avoid Pre-Defined Coding Rule To Write A Coded MessageDokument7 SeitenChapter 1: Coding Decoding: Important Note: It Is Good To Avoid Pre-Defined Coding Rule To Write A Coded MessageUmamNoch keine Bewertungen
- IIM Nagpur Test 1 Version 1 2016Dokument6 SeitenIIM Nagpur Test 1 Version 1 2016Saksham GoyalNoch keine Bewertungen
- Leading The Industry In: Solar Microinverter TechnologyDokument2 SeitenLeading The Industry In: Solar Microinverter TechnologydukegaloNoch keine Bewertungen
- App NandDokument30 SeitenApp NandRajesh MedampudiNoch keine Bewertungen
- Lecture 5Dokument35 SeitenLecture 5MAHAMA SADIKNoch keine Bewertungen
- Presentation5 EV ArchitectureDokument26 SeitenPresentation5 EV ArchitectureJAYKUMAR MUKESHBHAI THAKORNoch keine Bewertungen
- Study of Padmanabhapuram Palace TrivandrumDokument14 SeitenStudy of Padmanabhapuram Palace Trivandrumcrustybubbles100% (2)
- InfoDokument18 SeitenInfoKaran Verm'aNoch keine Bewertungen
- Partea I .60p I. Read The Text Below and Complete The Following Tasks. Write All Your Answers On The Answer SheetDokument4 SeitenPartea I .60p I. Read The Text Below and Complete The Following Tasks. Write All Your Answers On The Answer SheetaaddniaNoch keine Bewertungen
- CH 12 Review Solutions PDFDokument11 SeitenCH 12 Review Solutions PDFOyinkansola OsiboduNoch keine Bewertungen
- V7R3 Recovery Guide Sc415304Dokument560 SeitenV7R3 Recovery Guide Sc415304gort400Noch keine Bewertungen
- Microgrid Modeling and Grid Interconnection StudiesDokument71 SeitenMicrogrid Modeling and Grid Interconnection StudiesVeeravasantharao BattulaNoch keine Bewertungen
- T8 - Energetics IDokument28 SeitenT8 - Energetics II Kadek Irvan Adistha PutraNoch keine Bewertungen
- Soiling Rates of PV Modules vs. Thermopile PyranometersDokument3 SeitenSoiling Rates of PV Modules vs. Thermopile PyranometersAbdul Mohid SheikhNoch keine Bewertungen
- LAAMS Technical Summary Tensar+Dokument17 SeitenLAAMS Technical Summary Tensar+Janaki RamNoch keine Bewertungen
- Ims PrecalDokument10 SeitenIms PrecalRhea GlipoNoch keine Bewertungen
- LTE Rach ProcedureDokument4 SeitenLTE Rach ProcedureDeepak JammyNoch keine Bewertungen
- Lec1 PDFDokument12 SeitenLec1 PDFtogarsNoch keine Bewertungen
- Mathematical TricksDokument4 SeitenMathematical Tricksapi-440622270Noch keine Bewertungen
- Downloadble Science NotesDokument55 SeitenDownloadble Science NotesJeb PampliegaNoch keine Bewertungen
- Coding Assignment 18-WPS OfficeDokument9 SeitenCoding Assignment 18-WPS Officetamj tamjNoch keine Bewertungen
- A334 Carino, Patricia Andrea Assignment On ForecastingDokument3 SeitenA334 Carino, Patricia Andrea Assignment On ForecastingPatricia Andrea CariñoNoch keine Bewertungen