Das könnte Ihnen auch gefallen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- GP Rating GSK Exit ExamDokument108 SeitenGP Rating GSK Exit ExamMicle VM100% (4)
- Breaking NewsDokument149 SeitenBreaking NewstigerlightNoch keine Bewertungen
- Master SEODokument8 SeitenMaster SEOOkane MochiNoch keine Bewertungen
- Physioex 9.0 Exercise 1 Act 1Dokument5 SeitenPhysioex 9.0 Exercise 1 Act 1Adela LhuzNoch keine Bewertungen
- BIT 4107 Mobile Application DevelopmentDokument136 SeitenBIT 4107 Mobile Application DevelopmentVictor NyanumbaNoch keine Bewertungen
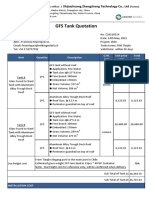
- GFS Tank Quotation C20210514Dokument4 SeitenGFS Tank Quotation C20210514Francisco ManriquezNoch keine Bewertungen
- Civil Service Exam Clerical Operations QuestionsDokument5 SeitenCivil Service Exam Clerical Operations QuestionsJeniGatelaGatillo100% (3)
- GS16 Gas Valve: With On-Board DriverDokument4 SeitenGS16 Gas Valve: With On-Board DriverProcurement PardisanNoch keine Bewertungen
- Shouldice Hospital Ltd.Dokument5 SeitenShouldice Hospital Ltd.Martín Gómez CortésNoch keine Bewertungen
- Kaydon Dry Gas SealDokument12 SeitenKaydon Dry Gas Sealxsi666Noch keine Bewertungen
- Bula Defense M14 Operator's ManualDokument32 SeitenBula Defense M14 Operator's ManualmeNoch keine Bewertungen
- Techniques in Selecting and Organizing InformationDokument3 SeitenTechniques in Selecting and Organizing InformationMylen Noel Elgincolin ManlapazNoch keine Bewertungen
- Exercise-01: JEE-PhysicsDokument52 SeitenExercise-01: JEE-Physicsjk rNoch keine Bewertungen
- Why Choose Medicine As A CareerDokument25 SeitenWhy Choose Medicine As A CareerVinod KumarNoch keine Bewertungen
- Statistical Decision AnalysisDokument3 SeitenStatistical Decision AnalysisTewfic SeidNoch keine Bewertungen
- AA ActivitiesDokument4 SeitenAA ActivitiesSalim Amazir100% (1)
- Technical Manual - C&C08 Digital Switching System Chapter 2 OverviewDokument19 SeitenTechnical Manual - C&C08 Digital Switching System Chapter 2 OverviewSamuel100% (2)
- Easa Management System Assessment ToolDokument40 SeitenEasa Management System Assessment ToolAdam Tudor-danielNoch keine Bewertungen
- IELTS Speaking Q&ADokument17 SeitenIELTS Speaking Q&ABDApp Star100% (1)
- Real Estate Broker ReviewerREBLEXDokument124 SeitenReal Estate Broker ReviewerREBLEXMar100% (4)
- Seminar Course Report ON Food SafetyDokument25 SeitenSeminar Course Report ON Food SafetyYanNoch keine Bewertungen
- Ailunce HD1 Software ManualDokument33 SeitenAilunce HD1 Software ManualMarc LaBarberaNoch keine Bewertungen
- CS210 Lecture 32 Magical Application Binary Tree IIIDokument38 SeitenCS210 Lecture 32 Magical Application Binary Tree IIIOshoNoch keine Bewertungen
- Google Earth Learning Activity Cuban Missile CrisisDokument2 SeitenGoogle Earth Learning Activity Cuban Missile CrisisseankassNoch keine Bewertungen
- A Guide To in The: First AidDokument20 SeitenA Guide To in The: First AidsanjeevchsNoch keine Bewertungen
- Allan S. Cu v. Small Business Guarantee and FinanceDokument2 SeitenAllan S. Cu v. Small Business Guarantee and FinanceFrancis Coronel Jr.Noch keine Bewertungen
- Objective Mech II - IES 2009 Question PaperDokument28 SeitenObjective Mech II - IES 2009 Question Paperaditya_kumar_meNoch keine Bewertungen
- There Is There Are Exercise 1Dokument3 SeitenThere Is There Are Exercise 1Chindy AriestaNoch keine Bewertungen
- Tutorial 1 Discussion Document - Batch 03Dokument4 SeitenTutorial 1 Discussion Document - Batch 03Anindya CostaNoch keine Bewertungen