Das könnte Ihnen auch gefallen
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsVon EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsBewertung: 3.5 von 5 Sternen3.5/5 (6)
- Ic5 CatDokument20 SeitenIc5 CatKỹ Sư TđhNoch keine Bewertungen
- Ls Inverter Ic5Dokument20 SeitenLs Inverter Ic5lamonahNoch keine Bewertungen
- Tài Liệu Biến Tần LS IC5Dokument20 SeitenTài Liệu Biến Tần LS IC5hieudaivuongNoch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- 87 Catalog Invertere Ic5Dokument19 Seiten87 Catalog Invertere Ic5vga1234Noch keine Bewertungen
- LG VFD Drive ManualDokument16 SeitenLG VFD Drive ManualrnkmipNoch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- LG Surucu Ig5Dokument16 SeitenLG Surucu Ig5uyung_mustofaNoch keine Bewertungen
- I G5Dokument16 SeitenI G5MoustaffaNoch keine Bewertungen
- Offshore Electrical Engineering ManualVon EverandOffshore Electrical Engineering ManualBewertung: 4 von 5 Sternen4/5 (9)
- LS Inverter Series PDFDokument16 SeitenLS Inverter Series PDFQuang Chánh NguyễnNoch keine Bewertungen
- Analog Circuit Design Volume Three: Design Note CollectionVon EverandAnalog Circuit Design Volume Three: Design Note CollectionBewertung: 3 von 5 Sternen3/5 (2)
- iG5A E (2012.01)Dokument44 SeiteniG5A E (2012.01)ao0511Noch keine Bewertungen
- Manual iG5A - E - 0425Dokument32 SeitenManual iG5A - E - 0425my27100% (1)
- Starvert: Compact & Powerful InverterDokument44 SeitenStarvert: Compact & Powerful InverterdanarcanaNoch keine Bewertungen
- C100 CatalogDokument20 SeitenC100 CatalogMarcela RoneNoch keine Bewertungen
- Inversor IG5A LSDokument36 SeitenInversor IG5A LSBuratti2010100% (1)
- Faldic Ryc 102c3-Vvt2Dokument20 SeitenFaldic Ryc 102c3-Vvt2Seaman Kataki100% (1)
- Variable Frequency Drive: 0.4 2.2kW (0.5 3HP) 1 Phase 200-230voltsDokument20 SeitenVariable Frequency Drive: 0.4 2.2kW (0.5 3HP) 1 Phase 200-230voltsahmed Marei100% (1)
- File 1233inverterDokument6 SeitenFile 1233inverterfrederypsNoch keine Bewertungen
- 1fázisú Frekvenciaváltó, 3fázisú Frekvenciaváltó, Inverter Katalógus KatalógusDokument10 Seiten1fázisú Frekvenciaváltó, 3fázisú Frekvenciaváltó, Inverter Katalógus Katalóguses64u4Noch keine Bewertungen
- Tech Characteristic VEGADokument16 SeitenTech Characteristic VEGADark _Noch keine Bewertungen
- Sumitomo HF-430 Guìa RápidaDokument31 SeitenSumitomo HF-430 Guìa RápidaJohancito Valencia100% (2)
- L&T Yaskawa AC DrivesDokument20 SeitenL&T Yaskawa AC Drivesjunfa0% (1)
- Samsung AC Servo System 2009 4Dokument40 SeitenSamsung AC Servo System 2009 4Frank M C100% (1)
- Drive Systems A500 Series: Your Partner in Industrial Automation SystemsDokument4 SeitenDrive Systems A500 Series: Your Partner in Industrial Automation SystemsFranklin DannyNoch keine Bewertungen
- AC Invertor1000dsDokument20 SeitenAC Invertor1000dsRonak PatelNoch keine Bewertungen
- SV Ih CatalogDokument20 SeitenSV Ih CatalogMoustaffaNoch keine Bewertungen
- StarvertDokument44 SeitenStarvertChivuTeodorNoch keine Bewertungen
- Description Power Range: Analog Servo DriveDokument8 SeitenDescription Power Range: Analog Servo DriveElectromateNoch keine Bewertungen
- Description Power Range: Analog Servo DriveDokument8 SeitenDescription Power Range: Analog Servo DriveElectromateNoch keine Bewertungen
- Program Controller For RCA2/RCA: List of ModelsDokument10 SeitenProgram Controller For RCA2/RCA: List of ModelsElectromateNoch keine Bewertungen
- Compacte Handleiding V7Dokument60 SeitenCompacte Handleiding V7gui9871Noch keine Bewertungen
- Description Power Range: Analog Servo DriveDokument8 SeitenDescription Power Range: Analog Servo DriveElectromateNoch keine Bewertungen
- Opti E2Dokument2 SeitenOpti E2Dubravko BituhNoch keine Bewertungen
- N100-Hyundai Brochure 2Dokument28 SeitenN100-Hyundai Brochure 2herororoNoch keine Bewertungen
- n50 831 PDFDokument20 Seitenn50 831 PDFhonquellNoch keine Bewertungen
- Variable Frequency DriveDokument2 SeitenVariable Frequency Drivenksuthar5399Noch keine Bewertungen
- Inverter TecoDokument12 SeitenInverter TecoBotjah TjilikNoch keine Bewertungen
- Description Power Range: Analog Servo DriveDokument7 SeitenDescription Power Range: Analog Servo DriveElectromateNoch keine Bewertungen
- Description Power Range: Analog Servo DriveDokument7 SeitenDescription Power Range: Analog Servo DriveElectromateNoch keine Bewertungen
- JX Variable Speed Drives DatasheetDokument22 SeitenJX Variable Speed Drives Datasheetamijoski6051Noch keine Bewertungen
- Inverter Varispeed F7A (KAE-S616-55F)Dokument98 SeitenInverter Varispeed F7A (KAE-S616-55F)Miguel LinaresNoch keine Bewertungen
- Description Power Range: Analog Servo DriveDokument7 SeitenDescription Power Range: Analog Servo DriveElectromateNoch keine Bewertungen
- Microprocessor Engine/Generator Controller: Model MEC 20Dokument4 SeitenMicroprocessor Engine/Generator Controller: Model MEC 20Gerardo OrtizNoch keine Bewertungen
- Description Power Range: Analog Servo DriveDokument7 SeitenDescription Power Range: Analog Servo DriveElectromateNoch keine Bewertungen
- Analog Servo Drive: Description Power RangeDokument9 SeitenAnalog Servo Drive: Description Power RangeElectromateNoch keine Bewertungen
- Commander SE: Simple and EasyDokument8 SeitenCommander SE: Simple and EasyRitesh SharmaNoch keine Bewertungen
- VS1ST VariadorDokument4 SeitenVS1ST VariadorAnonymous LBwADkNZHNoch keine Bewertungen
- Isel ControlerDokument18 SeitenIsel Controlermihail91smNoch keine Bewertungen
- Variflex2 RVEF - Datasheet - EnGDokument8 SeitenVariflex2 RVEF - Datasheet - EnGPepe ChampiiNoch keine Bewertungen
- Description Power Range: Analog Servo DriveDokument8 SeitenDescription Power Range: Analog Servo DriveElectromateNoch keine Bewertungen
- High Performances in Small Dimensions: InverterDokument19 SeitenHigh Performances in Small Dimensions: InverterСДММ ГЕВГЕЛИЈАNoch keine Bewertungen
- Analog Servo Drive: Description Power RangeDokument9 SeitenAnalog Servo Drive: Description Power RangeElectromateNoch keine Bewertungen
- Frenic LiftDokument8 SeitenFrenic LiftĐộc Thiên ThanhNoch keine Bewertungen
- Catalog LS OMRONDokument72 SeitenCatalog LS OMRONKurnia FajarNoch keine Bewertungen
- Biscuit Cooling ConveyorDokument1 SeiteBiscuit Cooling ConveyorKurnia FajarNoch keine Bewertungen
- MCB or MCCBDokument4 SeitenMCB or MCCBKurnia FajarNoch keine Bewertungen
- Homework 8Dokument1 SeiteHomework 8Gungun N RahmatullahNoch keine Bewertungen
- Serial Number of Deep FreezeDokument1 SeiteSerial Number of Deep FreezeKurnia FajarNoch keine Bewertungen
- Input Circuit Power Circuit Output CircuitDokument11 SeitenInput Circuit Power Circuit Output CircuitKurnia FajarNoch keine Bewertungen
- Berikut Ini Adalah Daftar Irregular Verb Terlengkap Beserta Arti Bahasa IndonesiaDokument12 SeitenBerikut Ini Adalah Daftar Irregular Verb Terlengkap Beserta Arti Bahasa IndonesiaKurnia FajarNoch keine Bewertungen
- Good Practices and Innovations in Public Governance United Nations Public Service Awards Winners, 2012-2013Dokument254 SeitenGood Practices and Innovations in Public Governance United Nations Public Service Awards Winners, 2012-2013Adriana Alberti UN100% (1)
- Fire Hydrant - WikipediaDokument9 SeitenFire Hydrant - WikipediaVaibhav SawantNoch keine Bewertungen
- Creating Your Online CSSD Student Profile - MA Acting ProgrammesDokument7 SeitenCreating Your Online CSSD Student Profile - MA Acting ProgrammesEleanor ShawNoch keine Bewertungen
- Sany S800S ReviewDokument11 SeitenSany S800S ReviewJuna PasaribuNoch keine Bewertungen
- 02 Traps Management Service AdminDokument134 Seiten02 Traps Management Service AdminDonovan RuizNoch keine Bewertungen
- India International Centre India International Centre QuarterlyDokument15 SeitenIndia International Centre India International Centre QuarterlySruti UNoch keine Bewertungen
- ("Love",:Ruby) .Each ( - I - P I)Dokument32 Seiten("Love",:Ruby) .Each ( - I - P I)hervalNoch keine Bewertungen
- Greenhouse Project Interim ReportDokument26 SeitenGreenhouse Project Interim ReportMuneek ShahNoch keine Bewertungen
- 050-Itp For Installation of Air Intake Filter PDFDokument17 Seiten050-Itp For Installation of Air Intake Filter PDFKöksal PatanNoch keine Bewertungen
- GNP-GAP Installation InstructionsDokument10 SeitenGNP-GAP Installation InstructionsLeonardo ValenciaNoch keine Bewertungen
- Absolute ValueDokument19 SeitenAbsolute Valueapi-70433300Noch keine Bewertungen
- PDH DFE1000 BrochureDokument2 SeitenPDH DFE1000 Brochuremajdi1985Noch keine Bewertungen
- Zombie RPGDokument30 SeitenZombie RPGBo100% (3)
- Business Plan ScrunshineDokument2 SeitenBusiness Plan ScrunshineEnjhelle MarinoNoch keine Bewertungen
- CT100-NT05 Service Manual PDFDokument93 SeitenCT100-NT05 Service Manual PDFDwane DuncanNoch keine Bewertungen
- Nift Panchkula Thesis Gaurav Bajaj 2009 Uar 646Dokument10 SeitenNift Panchkula Thesis Gaurav Bajaj 2009 Uar 646vedahiNoch keine Bewertungen
- Drainage Service GuidelinesDokument15 SeitenDrainage Service GuidelinesMarllon LobatoNoch keine Bewertungen
- UntitledDokument50 SeitenUntitledapi-118172932Noch keine Bewertungen
- Terminating Resistor: RS-422 Communication Instruction ManualDokument1 SeiteTerminating Resistor: RS-422 Communication Instruction ManualasdNoch keine Bewertungen
- MHC-S9D AmplificadorDokument28 SeitenMHC-S9D AmplificadorEnyah RodriguezNoch keine Bewertungen
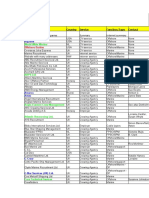
- Company Name Country Service Function/Type Contact: RigzoneDokument4 SeitenCompany Name Country Service Function/Type Contact: RigzonekokabawaNoch keine Bewertungen
- VancouverDokument11 SeitenVancouverAndi Firman MubarakNoch keine Bewertungen
- York Ylcs 725 HaDokument52 SeitenYork Ylcs 725 HaDalila Ammar100% (2)
- Ropecon Conveyor SystemDokument4 SeitenRopecon Conveyor Systemjayaraman3Noch keine Bewertungen
- P-L-N-Statistik 2011Dokument104 SeitenP-L-N-Statistik 2011Ahmad AfandiNoch keine Bewertungen
- NTE931 Integrated Circuit 3-Terminal Positive Voltage Regulator 5V, 3ADokument2 SeitenNTE931 Integrated Circuit 3-Terminal Positive Voltage Regulator 5V, 3AWilfredo MolinaNoch keine Bewertungen
- File Handling in C PDFDokument86 SeitenFile Handling in C PDFDeepak ShakyaNoch keine Bewertungen
- Presented by Name: Kanu Ikechukwu Department:Chemistry MATRIC NO:DE:2014/2707 REG NO:ITA/2015/122568Dokument13 SeitenPresented by Name: Kanu Ikechukwu Department:Chemistry MATRIC NO:DE:2014/2707 REG NO:ITA/2015/122568chdiNoch keine Bewertungen
- Design For ReliabilityDokument32 SeitenDesign For ReliabilityArman CustodioNoch keine Bewertungen
- Three-Phase Induction MotorsDokument32 SeitenThree-Phase Induction MotorsDimitriu CarmenNoch keine Bewertungen