Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Jntuk M Tech r16 Cse&it Syllabus PDFDokument197 SeitenJntuk M Tech r16 Cse&it Syllabus PDFAbhijeet SinghNoch keine Bewertungen
- SIT102 Introduction To Programming: Pass Task 1.1: Hello WorldDokument11 SeitenSIT102 Introduction To Programming: Pass Task 1.1: Hello WorldKaran GillNoch keine Bewertungen
- Calibration CertificateDokument29 SeitenCalibration CertificateSrinivasa Rao MullapudiNoch keine Bewertungen
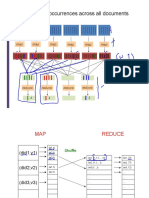
- Count Word Occurrences Across DocumentsDokument61 SeitenCount Word Occurrences Across DocumentsRicardo GomesNoch keine Bewertungen
- SimCities Can City Planning Mistakes Be Avoided Through Data-Driven SimulationsDokument3 SeitenSimCities Can City Planning Mistakes Be Avoided Through Data-Driven SimulationsRicardo GomesNoch keine Bewertungen
- Arcgis OnlineDokument20 SeitenArcgis OnlineMitrica Alexandra100% (1)
- Artigo - Factors in Risk PerceptionDokument11 SeitenArtigo - Factors in Risk PerceptionRicardo GomesNoch keine Bewertungen
- Make An App - Learn ArcGISDokument14 SeitenMake An App - Learn ArcGISRicardo GomesNoch keine Bewertungen
- Configure Pop-Ups - Learn ArcGISDokument13 SeitenConfigure Pop-Ups - Learn ArcGISRicardo GomesNoch keine Bewertungen
- Explore A Map - Learn ArcGISDokument10 SeitenExplore A Map - Learn ArcGISRicardo GomesNoch keine Bewertungen
- Get Started With ArcGIS Online - Learn ArcGISDokument1 SeiteGet Started With ArcGIS Online - Learn ArcGISRicardo GomesNoch keine Bewertungen
- Arc Gis OnlineDokument47 SeitenArc Gis OnlineCipta Nur AsaNoch keine Bewertungen
- Arc Gis OnlineDokument47 SeitenArc Gis OnlineCipta Nur AsaNoch keine Bewertungen
- Create A Map - Learn ArcGISDokument14 SeitenCreate A Map - Learn ArcGISRicardo GomesNoch keine Bewertungen
- Create A New Map in An Organization - ArcGIS VideoDokument1 SeiteCreate A New Map in An Organization - ArcGIS VideoRicardo GomesNoch keine Bewertungen
- ArcGISOnline enDokument8 SeitenArcGISOnline enRicardo GomesNoch keine Bewertungen
- Add A Layer From A CSV File - Learn ArcGISDokument11 SeitenAdd A Layer From A CSV File - Learn ArcGISRicardo GomesNoch keine Bewertungen
- ArcGIS 10 WmsDokument1 SeiteArcGIS 10 WmsRicardo GomesNoch keine Bewertungen
- ArcGIS 10 KMLDokument1 SeiteArcGIS 10 KMLRicardo GomesNoch keine Bewertungen
- 3.2 Cohort StudiesDokument4 Seiten3.2 Cohort StudiesRicardo GomesNoch keine Bewertungen
- Arcgis Help 10.1: Tutorial: Publishing A Map ServiceDokument1 SeiteArcgis Help 10.1: Tutorial: Publishing A Map ServiceRicardo GomesNoch keine Bewertungen
- Week 3 Epi Tool KitDokument2 SeitenWeek 3 Epi Tool KitRicardo GomesNoch keine Bewertungen
- 4.1 Common Statistical Tests and Applications in Epidemiological LiteratureDokument6 Seiten4.1 Common Statistical Tests and Applications in Epidemiological LiteratureRicardo GomesNoch keine Bewertungen
- Week 3 Epi Tool KitDokument2 SeitenWeek 3 Epi Tool KitRicardo GomesNoch keine Bewertungen
- 3.2 Risk Rate Measures Cohort StudiesDokument3 Seiten3.2 Risk Rate Measures Cohort StudiesRicardo GomesNoch keine Bewertungen
- 3.1 Randomized Control TrialsDokument4 Seiten3.1 Randomized Control TrialsRicardo GomesNoch keine Bewertungen
- Common Measures and Statistics in Epidemiological LiteratureDokument5 SeitenCommon Measures and Statistics in Epidemiological LiteratureRenzo FernandezNoch keine Bewertungen
- 3.5 Ecologic StudiesDokument4 Seiten3.5 Ecologic StudiesRicardo GomesNoch keine Bewertungen
- 3.3 Case-Control StudiesDokument5 Seiten3.3 Case-Control StudiesRicardo GomesNoch keine Bewertungen
- 3.4 Cross-Sectional StudiesDokument4 Seiten3.4 Cross-Sectional StudiesRicardo Gomes100% (1)
- Week 2 Epi Tool KitDokument1 SeiteWeek 2 Epi Tool KitRicardo GomesNoch keine Bewertungen
- Incident vs. Prevalent Cases and Measures of OccurrenceDokument3 SeitenIncident vs. Prevalent Cases and Measures of OccurrenceRenzo FernandezNoch keine Bewertungen
- Calculating Person TimeDokument3 SeitenCalculating Person TimeRenzo FernandezNoch keine Bewertungen
- Cs 2 PDFDokument4 SeitenCs 2 PDFHarsimran KapoorNoch keine Bewertungen
- Power On Your Lattepanda: WelcomeDokument58 SeitenPower On Your Lattepanda: Welcomejordan bjojoNoch keine Bewertungen
- Release Notes For Cisco UCS Rack Server Software, Release 4.1Dokument44 SeitenRelease Notes For Cisco UCS Rack Server Software, Release 4.1ceterelNoch keine Bewertungen
- Ch1 - Data RepresentationDokument29 SeitenCh1 - Data RepresentationSalmaNoch keine Bewertungen
- Manual - WAS100 (R1) AnemometerDokument33 SeitenManual - WAS100 (R1) Anemometerrohithunni.pNoch keine Bewertungen
- How To Reflow A Laptop Motherboard in A Household Oven - Computer Repair TipsDokument15 SeitenHow To Reflow A Laptop Motherboard in A Household Oven - Computer Repair TipsAdnan KhAn100% (2)
- Swidlec Lecture 01Dokument22 SeitenSwidlec Lecture 01zebra_finchNoch keine Bewertungen
- Campus Recruitment System Project ReportDokument31 SeitenCampus Recruitment System Project ReportYash DobariyaNoch keine Bewertungen
- ORACLE UCM OrderDokument17 SeitenORACLE UCM OrderMohinder SinghNoch keine Bewertungen
- TeamViewer API DocumentationDokument67 SeitenTeamViewer API DocumentationxeqhNoch keine Bewertungen
- Configuring Telnet: Information About The Telnet ServerDokument6 SeitenConfiguring Telnet: Information About The Telnet ServerShaiju JanardhananNoch keine Bewertungen
- Vanguard User ManualDokument81 SeitenVanguard User ManualHamdan IskandarNoch keine Bewertungen
- 03 Input Process OutputDokument4 Seiten03 Input Process OutputAiNoch keine Bewertungen
- Firmware Update Best Practices For Immv1 SystemsDokument17 SeitenFirmware Update Best Practices For Immv1 SystemsVimal RajNoch keine Bewertungen
- Lec9 CS604 PpsDokument30 SeitenLec9 CS604 PpsIbrahim ChoudaryNoch keine Bewertungen
- Chapter 4Dokument28 SeitenChapter 4Abo Shaker HaboudalNoch keine Bewertungen
- Mathcad's Keyboard Shortcuts (Page 1)Dokument2 SeitenMathcad's Keyboard Shortcuts (Page 1)ajakukNoch keine Bewertungen
- ICT CSS11 Q2 Week1 RANTEDokument10 SeitenICT CSS11 Q2 Week1 RANTEJASON PLAZANoch keine Bewertungen
- Master Com 250Dokument92 SeitenMaster Com 250gearhead1Noch keine Bewertungen
- Status 5Dokument15 SeitenStatus 5wimsurf1732Noch keine Bewertungen
- Browan Femto Cell User Guide - 20190702Dokument117 SeitenBrowan Femto Cell User Guide - 20190702Jose Eduardo FelippeNoch keine Bewertungen
- Implementing Samba 4 Sample ChapterDokument46 SeitenImplementing Samba 4 Sample ChapterPackt PublishingNoch keine Bewertungen
- Unit 3 CwipediaDokument21 SeitenUnit 3 CwipediaNashrah AnsariNoch keine Bewertungen
- PL7 Reference Manual 1Dokument228 SeitenPL7 Reference Manual 1Lê Duy TấnNoch keine Bewertungen
- TrueCall OS Platform SW Req 63Dokument11 SeitenTrueCall OS Platform SW Req 63James WangNoch keine Bewertungen
- Rafael Steven Sot (/S/) Productos y ServDokument3 SeitenRafael Steven Sot (/S/) Productos y ServRafael Steven Soto del CampoNoch keine Bewertungen
- SSIS in The CloudDokument17 SeitenSSIS in The CloudNirav RanaNoch keine Bewertungen