Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Sample Cross-Complaint For Indemnity For CaliforniaDokument4 SeitenSample Cross-Complaint For Indemnity For CaliforniaStan Burman75% (8)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- KangCV KAIST2015Dokument47 SeitenKangCV KAIST2015G Murali KrishnaNoch keine Bewertungen
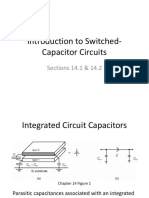
- 14 1 2 Introduction Switched Capacitor CircuitsDokument18 Seiten14 1 2 Introduction Switched Capacitor CircuitsG Murali KrishnaNoch keine Bewertungen
- EIS Mitschrift PDFDokument115 SeitenEIS Mitschrift PDFG Murali KrishnaNoch keine Bewertungen
- Ice Packs For MushroomsDokument2 SeitenIce Packs For MushroomsG Murali KrishnaNoch keine Bewertungen
- 2011-12 OTA GM IdDokument36 Seiten2011-12 OTA GM IdabhishekdwivediiitbNoch keine Bewertungen
- WP Raspberry Talks EnOceanDokument12 SeitenWP Raspberry Talks EnOceanG Murali KrishnaNoch keine Bewertungen
- Skynav Skm58 DsDokument9 SeitenSkynav Skm58 DsG Murali KrishnaNoch keine Bewertungen
- Datasheet FSRDokument10 SeitenDatasheet FSRLuis VazquezNoch keine Bewertungen
- 10-Transistor Full Adder Design Based On Degenerate Pass Transistor LogicDokument4 Seiten10-Transistor Full Adder Design Based On Degenerate Pass Transistor LogicRohith RajNoch keine Bewertungen
- Pass-Transistor Logic: - N Transistors - No Static ConsumptionDokument15 SeitenPass-Transistor Logic: - N Transistors - No Static ConsumptionG Murali KrishnaNoch keine Bewertungen
- Paramount Healthcare Management Private Limited: First Reminder Letter Without PrejudiceDokument1 SeiteParamount Healthcare Management Private Limited: First Reminder Letter Without PrejudiceSwapnil TiwariNoch keine Bewertungen
- Fmicb 10 02876Dokument11 SeitenFmicb 10 02876Angeles SuarezNoch keine Bewertungen
- Ideal Gas Law Lesson Plan FinalDokument5 SeitenIdeal Gas Law Lesson Plan FinalLonel SisonNoch keine Bewertungen
- ATADU2002 DatasheetDokument3 SeitenATADU2002 DatasheethindNoch keine Bewertungen
- The BetterPhoto Guide To Creative Digital Photography by Jim Miotke and Kerry Drager - ExcerptDokument19 SeitenThe BetterPhoto Guide To Creative Digital Photography by Jim Miotke and Kerry Drager - ExcerptCrown Publishing GroupNoch keine Bewertungen
- Benko Gambit-Jacobs and Kinsman, 1999Dokument163 SeitenBenko Gambit-Jacobs and Kinsman, 1999johnson Greker100% (3)
- Internal Analysis: Pertemuan KeDokument15 SeitenInternal Analysis: Pertemuan Kekintan utamiNoch keine Bewertungen
- Brochure International ConferenceDokument6 SeitenBrochure International ConferenceAnubhav Sharma sf 12Noch keine Bewertungen
- Will Smith BiographyDokument11 SeitenWill Smith Biographyjhonatan100% (1)
- What Says Doctors About Kangen WaterDokument13 SeitenWhat Says Doctors About Kangen Waterapi-342751921100% (2)
- Product Specifications Product Specifications: LLPX411F LLPX411F - 00 - V1 V1Dokument4 SeitenProduct Specifications Product Specifications: LLPX411F LLPX411F - 00 - V1 V1David MooneyNoch keine Bewertungen
- FSM Syllabus20071228 1Dokument3 SeitenFSM Syllabus20071228 1Institute of Fengshui BaziNoch keine Bewertungen
- 200150, 200155 & 200157 Accelerometers: DescriptionDokument16 Seiten200150, 200155 & 200157 Accelerometers: DescriptionJOSE MARIA DANIEL CANALESNoch keine Bewertungen
- Part Time Civil SyllabusDokument67 SeitenPart Time Civil SyllabusEr Govind Singh ChauhanNoch keine Bewertungen
- MECANISMOS de Metais de TransicaoDokument36 SeitenMECANISMOS de Metais de TransicaoJoão BarbosaNoch keine Bewertungen
- MV Lec PDFDokument102 SeitenMV Lec PDFJonas Datu100% (1)
- Zygosaccharomyces James2011Dokument11 SeitenZygosaccharomyces James2011edson escamillaNoch keine Bewertungen
- Power Control 3G CDMADokument18 SeitenPower Control 3G CDMAmanproxNoch keine Bewertungen
- List of The Legend of Korra Episodes - Wikipedia PDFDokument27 SeitenList of The Legend of Korra Episodes - Wikipedia PDFEmmanuel NocheNoch keine Bewertungen
- 3M 309 MSDSDokument6 Seiten3M 309 MSDSLe Tan HoaNoch keine Bewertungen
- Agile ModelingDokument15 SeitenAgile Modelingprasad19845Noch keine Bewertungen
- IBPS Clerk Pre QUANT Memory Based 2019 QuestionsDokument8 SeitenIBPS Clerk Pre QUANT Memory Based 2019 Questionsk vinayNoch keine Bewertungen
- Powerwin EngDokument24 SeitenPowerwin Engbillwillis66Noch keine Bewertungen
- Monitor Stryker 26 PLGDokument28 SeitenMonitor Stryker 26 PLGBrandon MendozaNoch keine Bewertungen
- 100 20210811 ICOPH 2021 Abstract BookDokument186 Seiten100 20210811 ICOPH 2021 Abstract Bookwafiq alibabaNoch keine Bewertungen
- Homework 1Dokument8 SeitenHomework 1Yooncheul JeungNoch keine Bewertungen
- NGCP EstimatesDokument19 SeitenNGCP EstimatesAggasid ArnelNoch keine Bewertungen
- BS en Iso 06509-1995 (2000)Dokument10 SeitenBS en Iso 06509-1995 (2000)vewigop197Noch keine Bewertungen
- Particle BoardDokument1 SeiteParticle BoardNamrata RamahNoch keine Bewertungen