Das könnte Ihnen auch gefallen
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 13Dokument23 SeitenIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 13mahendranNoch keine Bewertungen
- Lec20 PDFDokument24 SeitenLec20 PDFmahendranNoch keine Bewertungen
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasDokument22 SeitenAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasabimanaNoch keine Bewertungen
- Lec 38Dokument22 SeitenLec 38Kunal BhagatNoch keine Bewertungen
- Multiphase Flows Dr. Rajesh Kumar Upadhyay Department of Chemical Engineering Indian Institute of Technology, Guwahati Lecture - 12Dokument24 SeitenMultiphase Flows Dr. Rajesh Kumar Upadhyay Department of Chemical Engineering Indian Institute of Technology, Guwahati Lecture - 12Anonymous EuMJuqo87Noch keine Bewertungen
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 14Dokument24 SeitenAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 14abimanaNoch keine Bewertungen
- Classical Mechanics: From Newtonian To Lagrangian FormulationDokument9 SeitenClassical Mechanics: From Newtonian To Lagrangian Formulationchirag jainNoch keine Bewertungen
- Lec19 PDFDokument22 SeitenLec19 PDFdurgaraokamireddyNoch keine Bewertungen
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasDokument20 SeitenAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasabimanaNoch keine Bewertungen
- Advanced Engineering Mathematics Prof. P. D. Srivastava Department of Mathematics Indian Institute of Technology, KharagpurDokument16 SeitenAdvanced Engineering Mathematics Prof. P. D. Srivastava Department of Mathematics Indian Institute of Technology, KharagpurdaniNoch keine Bewertungen
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 11Dokument25 SeitenAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 11abimanaNoch keine Bewertungen
- Aero Elasticity Prof. C.V. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 3Dokument26 SeitenAero Elasticity Prof. C.V. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 3Sayan PalNoch keine Bewertungen
- Classical Physics Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture No. # 35Dokument35 SeitenClassical Physics Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture No. # 35Anonymous 8f2veZfNoch keine Bewertungen
- Lec 31Dokument23 SeitenLec 31rajNoch keine Bewertungen
- Computational Fluid Dynamics Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurDokument16 SeitenComputational Fluid Dynamics Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpurk krishna chaitanyaNoch keine Bewertungen
- Lec11 PDFDokument25 SeitenLec11 PDFAbhishek AroraNoch keine Bewertungen
- Lec 20Dokument29 SeitenLec 20shubhamNoch keine Bewertungen
- Networks and Systems Profvgkmurti Department of Electrical Engineering Indian Institute of Technology, Madras Lecture - 23Dokument25 SeitenNetworks and Systems Profvgkmurti Department of Electrical Engineering Indian Institute of Technology, Madras Lecture - 23PrateekBansalNoch keine Bewertungen
- MITOCW - Ocw-18-01-F07-Lec15 - 300k: ProfessorDokument9 SeitenMITOCW - Ocw-18-01-F07-Lec15 - 300k: Professornk4everNoch keine Bewertungen
- Computational Fluid Dynamics, NPTEL Lecture 42 by Suman ChakraborthyDokument31 SeitenComputational Fluid Dynamics, NPTEL Lecture 42 by Suman ChakraborthyShubhankar Gurav 16210094Noch keine Bewertungen
- Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurDokument18 SeitenComputational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpurk krishna chaitanyaNoch keine Bewertungen
- Lec 33Dokument11 SeitenLec 33shailiayushNoch keine Bewertungen
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasDokument20 SeitenAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasabimanaNoch keine Bewertungen
- Lec8 PDFDokument17 SeitenLec8 PDFBekele GaddisaNoch keine Bewertungen
- Kinetics, Homogenous Nucleation, Interface Energy, Critical Radius, Nuclei Robability, ClusterDokument13 SeitenKinetics, Homogenous Nucleation, Interface Energy, Critical Radius, Nuclei Robability, ClusterSouth AkNoch keine Bewertungen
- Lec 2Dokument9 SeitenLec 2Himanshu RanjanNoch keine Bewertungen
- Lagrangian Mechanics 4Dokument13 SeitenLagrangian Mechanics 4Sahibnoor SinghNoch keine Bewertungen
- Lec14 PDFDokument21 SeitenLec14 PDFAbhishek AroraNoch keine Bewertungen
- Lec 28Dokument24 SeitenLec 28Win Alfalah NasutionNoch keine Bewertungen
- Lec 2Dokument13 SeitenLec 2RAHUL NARANGNoch keine Bewertungen
- Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurDokument18 SeitenComputational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurRanganathan .kNoch keine Bewertungen
- GeagergaegDokument3 SeitenGeagergaegAnfernee LoNoch keine Bewertungen
- Lec 10Dokument27 SeitenLec 10Anonymous EuMJuqo87Noch keine Bewertungen
- Finite Element Method Prof C. S. Upadhyay Department of Mechanical EngineeringDokument27 SeitenFinite Element Method Prof C. S. Upadhyay Department of Mechanical EngineeringabimanaNoch keine Bewertungen
- Theoretical Mechanics Prof. Charudatt Kadolkar Department of Physics Indian Institute of Technology-Guwahati Lecture - 04 D'Alembert's PrincipleDokument12 SeitenTheoretical Mechanics Prof. Charudatt Kadolkar Department of Physics Indian Institute of Technology-Guwahati Lecture - 04 D'Alembert's PrincipleHow to do anything By HimanshuNoch keine Bewertungen
- Linear and Volumetric Deformation Perspectives From Mass ConservationDokument10 SeitenLinear and Volumetric Deformation Perspectives From Mass ConservationghulamhabibscmeNoch keine Bewertungen
- QdbkvD4N UsDokument17 SeitenQdbkvD4N UsTheoNoch keine Bewertungen
- Lec40 PDFDokument23 SeitenLec40 PDFpothirajNoch keine Bewertungen
- Dynamic Response For Continuous SystemsDokument18 SeitenDynamic Response For Continuous SystemsDarsHan MoHan0% (1)
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 14Dokument21 SeitenIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 14mahendranNoch keine Bewertungen
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 26Dokument26 SeitenIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 26mahendranNoch keine Bewertungen
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasDokument22 SeitenAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasdurgaraokamireddyNoch keine Bewertungen
- Lec 33Dokument35 SeitenLec 33Ankit KumarNoch keine Bewertungen
- Mathematical NotesDokument5 SeitenMathematical NotesashNoch keine Bewertungen
- Instructor (Brad Osgood) :does Somebody Know - Don't You Occasionally Get BadDokument10 SeitenInstructor (Brad Osgood) :does Somebody Know - Don't You Occasionally Get BadElisée NdjabuNoch keine Bewertungen
- Lec 25Dokument14 SeitenLec 25manujNoch keine Bewertungen
- Instructor (Brad Osgood) :hello. I Hate It When I Do That. All Right. Here's SomeDokument12 SeitenInstructor (Brad Osgood) :hello. I Hate It When I Do That. All Right. Here's SomeElisée NdjabuNoch keine Bewertungen
- Lec 39Dokument32 SeitenLec 39Sueja MalligwadNoch keine Bewertungen
- Z5 y RMMVUC5 WDokument20 SeitenZ5 y RMMVUC5 WTheoNoch keine Bewertungen
- Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurDokument13 SeitenComputational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurSubhendu MaityNoch keine Bewertungen
- Lec 11Dokument9 SeitenLec 11Government Polytechnic Gulzarbagh Patna 7Noch keine Bewertungen
- Functional Analysis Prof. P. D. Srivastava Department of Mathematics Indian Institute of Technology, KharagpurDokument15 SeitenFunctional Analysis Prof. P. D. Srivastava Department of Mathematics Indian Institute of Technology, KharagpurKofi Appiah-DanquahNoch keine Bewertungen
- Lec 22Dokument28 SeitenLec 22Shreyas Gupta 4-Yr B.Tech. Chemical Engg., IIT (BHU) VaranasiNoch keine Bewertungen
- Lec 17 Introduction To Vector CalculusDokument22 SeitenLec 17 Introduction To Vector CalculusVishnu ShashankNoch keine Bewertungen
- Lec 5Dokument23 SeitenLec 5erdo mandanaNoch keine Bewertungen
- Lagrange's Equations PDFDokument26 SeitenLagrange's Equations PDFDebkanta DasNoch keine Bewertungen
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 8Dokument21 SeitenAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 8abimanaNoch keine Bewertungen
- Aero Elasticity Prof. C. V. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 23Dokument24 SeitenAero Elasticity Prof. C. V. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 23Anonymous 8f2veZfNoch keine Bewertungen
- MITOCW - MITRES - 18-007 - Part3 - Lec6 - 300k.mp4: ProfessorDokument12 SeitenMITOCW - MITRES - 18-007 - Part3 - Lec6 - 300k.mp4: Professorgaur1234Noch keine Bewertungen
- TorsionDokument14 SeitenTorsionProninaNoch keine Bewertungen
- CES 6116 FEM Review of Matrix AnalysisDokument46 SeitenCES 6116 FEM Review of Matrix AnalysisVeronica TobiasNoch keine Bewertungen
- 17 - Yield Line Theory For SlabsDokument9 Seiten17 - Yield Line Theory For SlabsRavindra MR100% (1)
- ,qioxhqfh /LQHV) Ru 6wdwlfdoo/ 'Hwhuplqdwh 6wuxfwxuhvDokument38 Seiten,qioxhqfh /LQHV) Ru 6wdwlfdoo/ 'Hwhuplqdwh 6wuxfwxuhvMawanda TonnyNoch keine Bewertungen
- TorsionDokument14 SeitenTorsionProninaNoch keine Bewertungen
- Matrices7 2009 1Dokument2 SeitenMatrices7 2009 1TravisbossNoch keine Bewertungen
- Thermal OpcDokument10 SeitenThermal OpccyapNoch keine Bewertungen
- Buling Thermal Analysis GoodDokument19 SeitenBuling Thermal Analysis GoodAhsan SattarNoch keine Bewertungen
- HttpsDokument1 SeiteHttpsAnonymous 8f2veZfNoch keine Bewertungen
- BV Variable Load Spring SupportsDokument15 SeitenBV Variable Load Spring SupportsMichael WaltersNoch keine Bewertungen
- Theory of Buckling and Post Buckling Behavior of Elastic Structures PDFDokument65 SeitenTheory of Buckling and Post Buckling Behavior of Elastic Structures PDFAnonymous 8f2veZfNoch keine Bewertungen
- StrucschemesyllDokument26 SeitenStrucschemesyllSagar R GowdaNoch keine Bewertungen
- Matrix Primer Lect2 PDFDokument15 SeitenMatrix Primer Lect2 PDFTarun BharadwajNoch keine Bewertungen
- BV Variable Load Spring SupportsDokument15 SeitenBV Variable Load Spring SupportsMichael WaltersNoch keine Bewertungen
- Cremona Diagram For Truss AnalysisDokument14 SeitenCremona Diagram For Truss AnalysisAnton Husen PurboyoNoch keine Bewertungen
- Chapter 2 Part 2 - Deflection Unit Load MethodDokument51 SeitenChapter 2 Part 2 - Deflection Unit Load MethodAnonymous 8f2veZf100% (2)
- Yield Line Theory (Examples) : Suhaimi Abu Bakar, PHDDokument15 SeitenYield Line Theory (Examples) : Suhaimi Abu Bakar, PHDUmange RanasingheNoch keine Bewertungen
- Acsa Am 84 1Dokument6 SeitenAcsa Am 84 1Ronald CostalesNoch keine Bewertungen
- Yield Line Theory (Examples) : Suhaimi Abu Bakar, PHDDokument15 SeitenYield Line Theory (Examples) : Suhaimi Abu Bakar, PHDUmange RanasingheNoch keine Bewertungen
- Matrix Primer Lect2 PDFDokument15 SeitenMatrix Primer Lect2 PDFTarun BharadwajNoch keine Bewertungen
- Design of Tension MembersDokument38 SeitenDesign of Tension Memberser_zaheer50% (2)
- ME101 Lecture11 KDDokument21 SeitenME101 Lecture11 KDmoondonoo7Noch keine Bewertungen
- Yield Line Theory (Examples) : Suhaimi Abu Bakar, PHDDokument15 SeitenYield Line Theory (Examples) : Suhaimi Abu Bakar, PHDUmange RanasingheNoch keine Bewertungen
- Chapter 3 Torsion: P D T P DDokument25 SeitenChapter 3 Torsion: P D T P DAjoy Kumar PandeyNoch keine Bewertungen
- Yield Line Theory (Examples) : Suhaimi Abu Bakar, PHDDokument15 SeitenYield Line Theory (Examples) : Suhaimi Abu Bakar, PHDUmange RanasingheNoch keine Bewertungen
- Yield Line Theory (Examples) : Suhaimi Abu Bakar, PHDDokument15 SeitenYield Line Theory (Examples) : Suhaimi Abu Bakar, PHDUmange RanasingheNoch keine Bewertungen
- Yield Line Theory (Examples) : Suhaimi Abu Bakar, PHDDokument15 SeitenYield Line Theory (Examples) : Suhaimi Abu Bakar, PHDUmange RanasingheNoch keine Bewertungen
- Chapter 3 Torsion: P D T P DDokument25 SeitenChapter 3 Torsion: P D T P DAjoy Kumar PandeyNoch keine Bewertungen
- 3 Curvilinear MotionDokument50 Seiten3 Curvilinear Motiongarhgelh100% (1)
- Tokyo Guidelines 2018Dokument115 SeitenTokyo Guidelines 2018Alik Razi100% (1)
- Optical Scattering of Gold NanosphereDokument24 SeitenOptical Scattering of Gold NanosphereParas KumarNoch keine Bewertungen
- Worksheet - 143760187HS-II, TUTORIAL ON CH-5Dokument14 SeitenWorksheet - 143760187HS-II, TUTORIAL ON CH-5A MusaverNoch keine Bewertungen
- Book Index The Art of Heavy TransportDokument6 SeitenBook Index The Art of Heavy TransportHermon Pakpahan50% (2)
- TM 10-3930-669-34 Forklift Truck 6K Drexel MDL R60SL-DC Part 1Dokument294 SeitenTM 10-3930-669-34 Forklift Truck 6K Drexel MDL R60SL-DC Part 1AdvocateNoch keine Bewertungen
- 8-General Rules For Erection ProcedureDokument4 Seiten8-General Rules For Erection ProcedurePrijin UnnunnyNoch keine Bewertungen
- Prevailing Torque Locknut Technical SpecificationsDokument3 SeitenPrevailing Torque Locknut Technical SpecificationsLiu YangtzeNoch keine Bewertungen
- 9A02502 Transmission of Electric PowerDokument6 Seiten9A02502 Transmission of Electric PowersivabharathamurthyNoch keine Bewertungen
- Petersen Coils Basic 20principle and ApplicationDokument3 SeitenPetersen Coils Basic 20principle and ApplicationasotozuazuaNoch keine Bewertungen
- Multi Pressure Refrigeration CyclesDokument41 SeitenMulti Pressure Refrigeration CyclesSyed Wajih Ul Hassan80% (10)
- Human Wildlife Conflict Resolution PDFDokument9 SeitenHuman Wildlife Conflict Resolution PDFdemiNoch keine Bewertungen
- AIR Conditioner: Owner'S ManualDokument52 SeitenAIR Conditioner: Owner'S Manualashley diazNoch keine Bewertungen
- CulvertsDokument18 SeitenCulvertsAmmar A. Ali100% (1)
- Beastlikebalsam - Muscle BuildingDokument10 SeitenBeastlikebalsam - Muscle BuildingBalsam LaaroussiNoch keine Bewertungen
- List of Fatigue Standards and Fracture Standards Developed by ASTM & ISODokument3 SeitenList of Fatigue Standards and Fracture Standards Developed by ASTM & ISOSatrio Aditomo100% (1)
- Skincare Routine Order Cheat SheetDokument10 SeitenSkincare Routine Order Cheat SheetYel Salenga100% (3)
- SMAST - 150kW 02190 - 200929091953Dokument67 SeitenSMAST - 150kW 02190 - 200929091953David GarciaNoch keine Bewertungen
- Coffee Quality Manual by Abra Rand Nig Use IDokument25 SeitenCoffee Quality Manual by Abra Rand Nig Use IIpungNoch keine Bewertungen
- FebvreDokument449 SeitenFebvreIan Pereira AlvesNoch keine Bewertungen
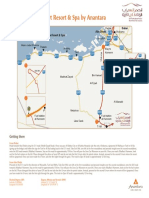
- Qasr Al Sarab Desert Resort Location Map June2012Dokument1 SeiteQasr Al Sarab Desert Resort Location Map June2012Anant GârgNoch keine Bewertungen
- Us Navy To Evaluate Anti Submarine Warfare Training SystemDokument2 SeitenUs Navy To Evaluate Anti Submarine Warfare Training SystemVictor PileggiNoch keine Bewertungen
- GB GW01 14 04 02Dokument2 SeitenGB GW01 14 04 02Muhammad LukmanNoch keine Bewertungen
- Science Magazine February 2020Dokument133 SeitenScience Magazine February 2020Elena González GonzálezNoch keine Bewertungen
- V. Jovicic and M. R. Coop1997 - Stiffness, Coarse Grained Soils, Small StrainsDokument17 SeitenV. Jovicic and M. R. Coop1997 - Stiffness, Coarse Grained Soils, Small StrainsxiangyugeotechNoch keine Bewertungen
- Surface Finish Measurement NotesDokument32 SeitenSurface Finish Measurement NotesAneez ShresthaNoch keine Bewertungen
- Stopping by Woods On A Snowy EveningDokument9 SeitenStopping by Woods On A Snowy EveningJulia Garces100% (2)
- Cold Regions Science and TechnologyDokument8 SeitenCold Regions Science and TechnologyAbraham SilesNoch keine Bewertungen
- Badminton ReviewerDokument10 SeitenBadminton ReviewerHailsey WinterNoch keine Bewertungen
- Maintenance Páginas-509-580Dokument72 SeitenMaintenance Páginas-509-580Alexandra Gabriela Pacheco PrietoNoch keine Bewertungen