Das könnte Ihnen auch gefallen
- VlsiDokument2 SeitenVlsiAlex TipantuñaNoch keine Bewertungen
- Combinatoria 1235557537Dokument5 SeitenCombinatoria 1235557537Pedro QuispitupacNoch keine Bewertungen
- VHDL 244Dokument40 SeitenVHDL 244Andrés Vanegas GuillénNoch keine Bewertungen
- Anexo Esforce 2019Dokument2 SeitenAnexo Esforce 2019Ángel OcañaNoch keine Bewertungen
- Catálogo-Cámaras HIKVISION PDFDokument5 SeitenCatálogo-Cámaras HIKVISION PDFAlex TipantuñaNoch keine Bewertungen
- Puntajes ReferencialesDokument180 SeitenPuntajes ReferencialesYamilet Nieto GómezNoch keine Bewertungen
- DefinicionDokument15 SeitenDefinicionAlex TipantuñaNoch keine Bewertungen
- Copia de Dgin Ingles Smae19 20190114 Distributivoaplicación 8230809604001548775973Dokument11 SeitenCopia de Dgin Ingles Smae19 20190114 Distributivoaplicación 8230809604001548775973Alex TipantuñaNoch keine Bewertungen
- DemenciaDokument15 SeitenDemenciaJuan De DiosNoch keine Bewertungen
- DemenciaDokument15 SeitenDemenciaJuan De DiosNoch keine Bewertungen
- Aprendizajes AncestralesDokument1 SeiteAprendizajes AncestralesAlex TipantuñaNoch keine Bewertungen
- Guia Rapida ProfinetDokument24 SeitenGuia Rapida ProfinetJoaquin Carrasco PinuerNoch keine Bewertungen
- Aprendizajes AncestralesDokument1 SeiteAprendizajes AncestralesAlex TipantuñaNoch keine Bewertungen
- Cálculo de Alimentador y Circuito DerivadoDokument7 SeitenCálculo de Alimentador y Circuito DerivadoAlex Tipantuña100% (2)
- Consulta 1 Familias LogicasDokument3 SeitenConsulta 1 Familias LogicasAlex TipantuñaNoch keine Bewertungen
- Tecnica de La Escultura - Tipantuña - AlexDokument1 SeiteTecnica de La Escultura - Tipantuña - AlexAlex TipantuñaNoch keine Bewertungen
- Control Cascada PlcsDokument4 SeitenControl Cascada PlcsAlex TipantuñaNoch keine Bewertungen
- El Valor EstéticoDokument1 SeiteEl Valor EstéticoAlex TipantuñaNoch keine Bewertungen
- Avance 1Dokument3 SeitenAvance 1Alex TipantuñaNoch keine Bewertungen
- Avance 7Dokument3 SeitenAvance 7Alex TipantuñaNoch keine Bewertungen
- Control PID TipantuñaDokument3 SeitenControl PID TipantuñaAlex TipantuñaNoch keine Bewertungen
- Compresor de Tornillo - TipantuñaDokument2 SeitenCompresor de Tornillo - TipantuñaAlex TipantuñaNoch keine Bewertungen
- Controladores para SISDokument3 SeitenControladores para SISAlex TipantuñaNoch keine Bewertungen
- La HidraulicaDokument3 SeitenLa HidraulicaAlex TipantuñaNoch keine Bewertungen
- ElectrovalvulasDokument3 SeitenElectrovalvulasAlex TipantuñaNoch keine Bewertungen
- Bitácora 1Dokument1 SeiteBitácora 1Alex TipantuñaNoch keine Bewertungen
- Módulo EM 235Dokument8 SeitenMódulo EM 235Alex TipantuñaNoch keine Bewertungen
- PLC S7-1200Dokument5 SeitenPLC S7-1200Alex Tipantuña100% (1)
- Paper VirtualDokument3 SeitenPaper VirtualAlex TipantuñaNoch keine Bewertungen
- Presentaciones Tema 0.0 - UNIR - CiberseguridadDokument52 SeitenPresentaciones Tema 0.0 - UNIR - CiberseguridadJacobo Nuñez LopezNoch keine Bewertungen
- Compensadores TiposDokument11 SeitenCompensadores TiposAlain VegganburyNoch keine Bewertungen
- Enfoque Sistémico y GestaltDokument14 SeitenEnfoque Sistémico y GestaltÁngela Delgado100% (2)
- Charla N2 de TermodinamicaDokument12 SeitenCharla N2 de TermodinamicaKael MilordNoch keine Bewertungen
- Termodinamica 16 de Abril PDFDokument10 SeitenTermodinamica 16 de Abril PDFCarlos Andres Jaimes HernandezNoch keine Bewertungen
- Notas-Control Retroalimentado Con Largo Tiempo Muerto PDFDokument26 SeitenNotas-Control Retroalimentado Con Largo Tiempo Muerto PDFMedinaNoch keine Bewertungen
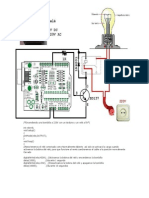
- Encendiendo Una Bombilla A 220V Con Un Arduino y Un Relé A 5VDokument2 SeitenEncendiendo Una Bombilla A 220V Con Un Arduino y Un Relé A 5VReinel MavisoyNoch keine Bewertungen
- 5.3. Planificación y Programacion (Neil 2021)Dokument45 Seiten5.3. Planificación y Programacion (Neil 2021)Lucas ChiainoNoch keine Bewertungen
- TALLER Aspectos Fundamentales de La Teoría General de Los Sistemas (T.G.S.)Dokument5 SeitenTALLER Aspectos Fundamentales de La Teoría General de Los Sistemas (T.G.S.)mariangelica7100% (1)
- Iso 9000 MonoDokument11 SeitenIso 9000 MonoYamil Ochoa NayhuaNoch keine Bewertungen
- Crecimiento de Poblacion de BreñaDokument4 SeitenCrecimiento de Poblacion de BreñaMario EnriqueNoch keine Bewertungen
- Epistemologia Cibernetica - Resumen de KeenyDokument14 SeitenEpistemologia Cibernetica - Resumen de KeenyJuan Carlos Melzner100% (1)
- El Paradigma de La Complejidad Como Salida de La Crisis de La PosmodernidadDokument14 SeitenEl Paradigma de La Complejidad Como Salida de La Crisis de La PosmodernidadescherichioNoch keine Bewertungen
- Control de Procesos - Lab 12Dokument18 SeitenControl de Procesos - Lab 12Elvis GarciaNoch keine Bewertungen
- Energía InternaDokument26 SeitenEnergía InternaCamila RamirezNoch keine Bewertungen
- Mapa ConceptualDokument101 SeitenMapa Conceptualhhar_88892% (25)
- La Economía Ecológica (Dokument20 SeitenLa Economía Ecológica (Misael EscobarNoch keine Bewertungen
- TermoDokument18 SeitenTermoLiccyNoch keine Bewertungen
- BautistaDokument145 SeitenBautistaAndres CastilloNoch keine Bewertungen
- El Nuevo Paradigma de La Complejidad y La Educación: Una Mirada HistóricaDokument17 SeitenEl Nuevo Paradigma de La Complejidad y La Educación: Una Mirada HistóricaJulianNoch keine Bewertungen
- Teoría de Control ModernaDokument12 SeitenTeoría de Control ModernasergioabelramirezzapNoch keine Bewertungen
- Proceso IsotérmicoDokument7 SeitenProceso IsotérmicoMaritto Garciia0% (1)
- GP de Ti - Clase V (WBS)Dokument44 SeitenGP de Ti - Clase V (WBS)William Daniel MoralesNoch keine Bewertungen
- Infografía TGSDokument1 SeiteInfografía TGSHeiber Quintero MonteroNoch keine Bewertungen
- Equilibrio TermicoDokument3 SeitenEquilibrio TermicoJose Maria Loango ChamorroNoch keine Bewertungen
- CP Lab 12Dokument6 SeitenCP Lab 12Mauricio ARNoch keine Bewertungen
- Práctica 8Dokument12 SeitenPráctica 8Isaac GuillenNoch keine Bewertungen
- Eficiencia de Máquinas Térmicas Endorreversibles IneficientesDokument7 SeitenEficiencia de Máquinas Térmicas Endorreversibles Ineficientescarolina coaquiraNoch keine Bewertungen
- Tarea 2Dokument8 SeitenTarea 2Elmer Palma RomeroNoch keine Bewertungen
- PRACTICA6 Termodinamica de Las Sustancias PurasDokument5 SeitenPRACTICA6 Termodinamica de Las Sustancias PurasAle AlvarezNoch keine Bewertungen