Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
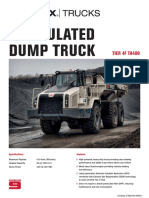
- Terex Tier4 TA 400 SpecDokument4 SeitenTerex Tier4 TA 400 Specarimbi jatisasongko100% (2)
- Whyte - 146-T-120-E-120 Supplementary Service Manual Edn1Dokument16 SeitenWhyte - 146-T-120-E-120 Supplementary Service Manual Edn1Jamie WatsonNoch keine Bewertungen
- Military EN 0217Dokument24 SeitenMilitary EN 0217AlvinBurhani100% (2)
- High Speed Pan Mixer: For Concrete ProductionDokument2 SeitenHigh Speed Pan Mixer: For Concrete Production113314Noch keine Bewertungen
- PM-RAP-87 Rapid Concrete Mixer Brochure 2016 - Low - ResDokument24 SeitenPM-RAP-87 Rapid Concrete Mixer Brochure 2016 - Low - Res113314100% (1)
- AshrrDokument3 SeitenAshrr113314Noch keine Bewertungen
- Ash 3 Struct - Sheet1Dokument1 SeiteAsh 3 Struct - Sheet1113314Noch keine Bewertungen
- Ash1 Struct - Sheet1Dokument1 SeiteAsh1 Struct - Sheet1113314Noch keine Bewertungen
- Ash2 Struct - Sheet1 PDFDokument1 SeiteAsh2 Struct - Sheet1 PDF113314Noch keine Bewertungen
- Transcript JnvuDokument2 SeitenTranscript Jnvu113314Noch keine Bewertungen
- Rajput BhupatsinhDokument4 SeitenRajput Bhupatsinh113314Noch keine Bewertungen
- Select of Vib Motor 1Dokument2 SeitenSelect of Vib Motor 1113314Noch keine Bewertungen
- Vib MotorDokument24 SeitenVib Motor113314Noch keine Bewertungen
- United States Patent (19) : Keough (45) Date of Patent: Mar. 10, 1987Dokument11 SeitenUnited States Patent (19) : Keough (45) Date of Patent: Mar. 10, 1987113314Noch keine Bewertungen
- Chain Calculation PDFDokument10 SeitenChain Calculation PDF113314Noch keine Bewertungen
- Bag House CollectionDokument12 SeitenBag House Collection113314Noch keine Bewertungen
- Affidavit of StudentDokument2 SeitenAffidavit of Student113314Noch keine Bewertungen
- Me 601Dokument3 SeitenMe 601113314Noch keine Bewertungen
- Time Table Dec-2016Dokument1 SeiteTime Table Dec-2016113314Noch keine Bewertungen
- Disclosure To Promote The Right To InformationDokument20 SeitenDisclosure To Promote The Right To InformationHussein BeqaiNoch keine Bewertungen
- Tata IndicaDokument2 SeitenTata IndicaRavi Chandran NudurumatiNoch keine Bewertungen
- Traction Motor Suspension Unit (MSU) or UTUBEDokument4 SeitenTraction Motor Suspension Unit (MSU) or UTUBENand LalNoch keine Bewertungen
- Inspeccion de Chasis de Camiones 777F PDFDokument19 SeitenInspeccion de Chasis de Camiones 777F PDFRAMON CALDERONNoch keine Bewertungen
- Tranztar Trailers Brochure PDFDokument32 SeitenTranztar Trailers Brochure PDFAbhi jayaswalNoch keine Bewertungen
- Trike Design 101Dokument38 SeitenTrike Design 101rjv23100% (1)
- XR 250 L 01Dokument493 SeitenXR 250 L 01andrewwitham50% (2)
- Static Analysis of Leaf SpringDokument7 SeitenStatic Analysis of Leaf SpringInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Calculation - BearingforcesDokument2 SeitenCalculation - BearingforcesFrancisNoch keine Bewertungen
- Iron SeparatorsDokument23 SeitenIron SeparatorsFavorSea Industrial Channel LimitedNoch keine Bewertungen
- 2008 Polaris RZR 800 Service Manual PDFDokument320 Seiten2008 Polaris RZR 800 Service Manual PDFBenjamin Mosso100% (1)
- Trakker AD380T38H HiLand PDFDokument2 SeitenTrakker AD380T38H HiLand PDFFerdian Sahputra0% (1)
- Royal Enfield Classic 500 FeaturesDokument8 SeitenRoyal Enfield Classic 500 Featuressmatishs100% (1)
- Design and Analysis of Tipper Truck Chassis: A K SinghDokument6 SeitenDesign and Analysis of Tipper Truck Chassis: A K SinghSandeep MeenaNoch keine Bewertungen
- May 27, 2015Dokument12 SeitenMay 27, 2015The Delphos HeraldNoch keine Bewertungen
- Car Suspension ModelingDokument27 SeitenCar Suspension ModelingAndrés Barón100% (1)
- Zotye Hunter BrochureDokument2 SeitenZotye Hunter BrochureHarshal Dhanawade100% (1)
- Piaggio X7 250 I.E - WorkshopDokument320 SeitenPiaggio X7 250 I.E - WorkshopZoilo DominguezNoch keine Bewertungen
- Flutter Suppression in Long-Span Suspension Bridges by Arrays of Hysteretic Tuned Mass DampersDokument10 SeitenFlutter Suppression in Long-Span Suspension Bridges by Arrays of Hysteretic Tuned Mass DampersNadji ChiNoch keine Bewertungen
- GMK4115Dokument28 SeitenGMK4115SeksiNoch keine Bewertungen
- Ac Loco ManualDokument103 SeitenAc Loco ManualDeepak Gehlot100% (1)
- 407 PDF BrochureDokument16 Seiten407 PDF Brochuredearon68Noch keine Bewertungen
- RT 650 TP - 214 - ADokument24 SeitenRT 650 TP - 214 - ARamón José Aponte FrancoNoch keine Bewertungen
- Bycycle ManualDokument167 SeitenBycycle ManualbabakdocNoch keine Bewertungen
- BDLQ 20190502 GN 01 - B.Pump - Rexsun PDFDokument17 SeitenBDLQ 20190502 GN 01 - B.Pump - Rexsun PDFUniversal CollabNoch keine Bewertungen
- B9L RangeDokument9 SeitenB9L RangePhilippine Bus Enthusiasts SocietyNoch keine Bewertungen
- 182 185Dokument4 Seiten182 185jharl100% (1)
- ssp381 - Audi TT Coupé 07 - Suspension SystemDokument48 Seitenssp381 - Audi TT Coupé 07 - Suspension Systempsychoreality100% (2)