Das könnte Ihnen auch gefallen
- Aplicaciones de Ecuacion Diferenciales en La Ingenieria de SistemasDokument10 SeitenAplicaciones de Ecuacion Diferenciales en La Ingenieria de SistemasRodner Ronco GalindoNoch keine Bewertungen
- Io en EducacionDokument3 SeitenIo en EducacionJose DelgadoNoch keine Bewertungen
- Regla Del Trapecio CompuestaDokument17 SeitenRegla Del Trapecio CompuestaDilmer Alexis Delgado HerreraNoch keine Bewertungen
- CAPITULO 10. - Ecuaciones en DiferenciasDokument21 SeitenCAPITULO 10. - Ecuaciones en DiferenciasAleNoch keine Bewertungen
- Sistema Lineales de Primer OrdenDokument11 SeitenSistema Lineales de Primer OrdenJosee Gregorio MedinaNoch keine Bewertungen
- Taller de Ejercicios Resueltos de Capacidad y Estabilidad de Los Procesos 2021Dokument5 SeitenTaller de Ejercicios Resueltos de Capacidad y Estabilidad de Los Procesos 2021GABRIELA LOZANO BASTIDASNoch keine Bewertungen
- Manual de Procesos y Procedimientos v4.0Dokument0 SeitenManual de Procesos y Procedimientos v4.0laser1506Noch keine Bewertungen
- 2.3 Curvas Planas y Ecuaciones Paramétricas PDFDokument21 Seiten2.3 Curvas Planas y Ecuaciones Paramétricas PDFWalterNoch keine Bewertungen
- N-Ejercicios Lab Estadistica 2018Dokument345 SeitenN-Ejercicios Lab Estadistica 2018RubenNoch keine Bewertungen
- Ecuaciones Diferenciales 2Dokument28 SeitenEcuaciones Diferenciales 2Nlievanoe NlievanoeNoch keine Bewertungen
- Ayudantía 6 OPTI2 PDFDokument1 SeiteAyudantía 6 OPTI2 PDFJavier León ParedesNoch keine Bewertungen
- Formulario de Áreas y Volúmenes. MatemáticasDokument3 SeitenFormulario de Áreas y Volúmenes. MatemáticasdubanNoch keine Bewertungen
- Abp Ecuaciones DiferencialDokument16 SeitenAbp Ecuaciones DiferencialIsaac CervantesNoch keine Bewertungen
- Análisis AHPDokument4 SeitenAnálisis AHPWinston Fontalvo CerpaNoch keine Bewertungen
- GAMS Matricial PDFDokument4 SeitenGAMS Matricial PDFKurkizeNoch keine Bewertungen
- Algoritmo de KruskalDokument4 SeitenAlgoritmo de KruskalGerman MariscalNoch keine Bewertungen
- Mpes U1 A3 MamhDokument5 SeitenMpes U1 A3 MamhNayeli Elizabeth Jimenez Medina0% (1)
- Examen Resuelto Del Senescytt 2015Dokument431 SeitenExamen Resuelto Del Senescytt 2015La Chikita BeiaNoch keine Bewertungen
- Diego Galvis Guia#1Dokument41 SeitenDiego Galvis Guia#1dgalvis_1100% (1)
- Guia Del EstudianteDokument135 SeitenGuia Del EstudianteJuan Jose NMNoch keine Bewertungen
- Diseño Cuadrado Latino y GrecolatinoDokument21 SeitenDiseño Cuadrado Latino y GrecolatinoMoises Villena PerezNoch keine Bewertungen
- Apuntes de Ecuaciones DiferencialesDokument90 SeitenApuntes de Ecuaciones DiferencialesGabo JonathanNoch keine Bewertungen
- Semana 02Dokument6 SeitenSemana 02Rolly Steven Cadillo PomaNoch keine Bewertungen
- Libro Integrales Resueltas PDFDokument242 SeitenLibro Integrales Resueltas PDFJordan Hernandez Vidal100% (2)
- Laboratorio 1 Modelos de Programación Lineal Deterministica - Jonathan - Garcia - FuentesDokument15 SeitenLaboratorio 1 Modelos de Programación Lineal Deterministica - Jonathan - Garcia - FuentesLili Pabuena VillarrealNoch keine Bewertungen
- 386 1 Modelos PLEDokument46 Seiten386 1 Modelos PLEAlejandra Sivila PadillaNoch keine Bewertungen
- Elementos de La Teoria de Los Juegos - E S VentselDokument77 SeitenElementos de La Teoria de Los Juegos - E S VentselMariano Nicolás ZalazarNoch keine Bewertungen
- Plan de Estudios Licenciatura en Matemáticas 26-04-2022Dokument2 SeitenPlan de Estudios Licenciatura en Matemáticas 26-04-2022Juliana BarreraNoch keine Bewertungen
- Manual Rapido LingoDokument27 SeitenManual Rapido LingoOscar BravoNoch keine Bewertungen
- 4.S13 SOL Sustitución TrigonométricaDokument9 Seiten4.S13 SOL Sustitución TrigonométricaRichard Oswaldo Buitron AsmatNoch keine Bewertungen
- Metodo RombergDokument8 SeitenMetodo RombergernestoNoch keine Bewertungen
- Miop U2 Ea CLRMDokument12 SeitenMiop U2 Ea CLRMClaudio RodriguezNoch keine Bewertungen
- Metodos Numericos en Fenomenos de Transporte PDFDokument313 SeitenMetodos Numericos en Fenomenos de Transporte PDFThePriusNoch keine Bewertungen
- Act. 1. U2 Sistema AutónomoDokument2 SeitenAct. 1. U2 Sistema AutónomoFrancisco LeónNoch keine Bewertungen
- Integración NuméricaDokument19 SeitenIntegración NuméricaYhan FloresNoch keine Bewertungen
- Tranformada de LaplaceDokument22 SeitenTranformada de LaplaceJairo Omar Mamani ValderramaNoch keine Bewertungen
- Generacion de Variables AleatoriasDokument13 SeitenGeneracion de Variables AleatoriasDulce EstrellaNoch keine Bewertungen
- Caso #2Dokument6 SeitenCaso #2luis campos100% (1)
- Tratamiento Estadístico de Los Datos en El Desarrollo de Una Investigación ComercialDokument8 SeitenTratamiento Estadístico de Los Datos en El Desarrollo de Una Investigación ComercialVickyManeroNoch keine Bewertungen
- TALLER - 13 SapagDokument7 SeitenTALLER - 13 SapagnancyNoch keine Bewertungen
- Derivadas e IntegralesDokument12 SeitenDerivadas e IntegralesDiegoHidalgoVergel100% (1)
- Solucion de Modelo de Programacion LinealDokument17 SeitenSolucion de Modelo de Programacion LinealDayana Cribillero LópezNoch keine Bewertungen
- Apuntes Calculo PDFDokument76 SeitenApuntes Calculo PDFEmily GabrielaNoch keine Bewertungen
- Areas de Una Region Limiada Por Una Curva ParametricaDokument15 SeitenAreas de Una Region Limiada Por Una Curva ParametricaEdy Jaulis ENoch keine Bewertungen
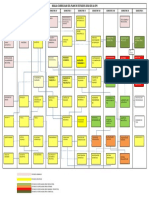
- Malla Curricular 2017Dokument1 SeiteMalla Curricular 2017Wilbert Rendón SalvadorNoch keine Bewertungen
- Cadenas de MarkovDokument8 SeitenCadenas de MarkovSARAY HERNÁNDEZNoch keine Bewertungen
- (Capítulo 6. Programación Lineal Entera y Binaria) PDFDokument10 Seiten(Capítulo 6. Programación Lineal Entera y Binaria) PDFsamir0504Noch keine Bewertungen
- CALCULO 3-111052M UnivalleDokument2 SeitenCALCULO 3-111052M UnivallewdmcwdmcNoch keine Bewertungen
- La Cultura Del Slow DownDokument25 SeitenLa Cultura Del Slow DownMiguel CoelloNoch keine Bewertungen
- Dualidad LindoDokument15 SeitenDualidad LindorantojrNoch keine Bewertungen
- Funciones Aritméticas PDFDokument19 SeitenFunciones Aritméticas PDFamcm25Noch keine Bewertungen
- Ecuaciones DiferencialesDokument14 SeitenEcuaciones DiferencialesAMYNNXXXX0% (1)
- 3 Ecuaciones Diferenciales Orden SuperiorDokument79 Seiten3 Ecuaciones Diferenciales Orden SuperiorYandel Perez PastranaNoch keine Bewertungen
- Ecuaciones Diferenciales OrdinariasDokument19 SeitenEcuaciones Diferenciales OrdinariassilverioNoch keine Bewertungen
- Taller Global 1.2 Ecuaciones Diferenciales 2021-2Dokument4 SeitenTaller Global 1.2 Ecuaciones Diferenciales 2021-2Anais GivovichNoch keine Bewertungen
- Ecuaciones Diferenciales Con MapleDokument10 SeitenEcuaciones Diferenciales Con Maple130quinterosNoch keine Bewertungen
- Unidad 3. Ecuaciones Diferenciales Lineales de Orden Superior PDFDokument26 SeitenUnidad 3. Ecuaciones Diferenciales Lineales de Orden Superior PDFKevin OvandoNoch keine Bewertungen
- UNIDAD DE APRENDIZAJE 2 SetDokument8 SeitenUNIDAD DE APRENDIZAJE 2 SetLuisa Angélica Chávez AguilarNoch keine Bewertungen
- Tema 6Dokument32 SeitenTema 6Fabian Augusto Molina MartinezNoch keine Bewertungen
- Hojas de Trabajo S5Dokument5 SeitenHojas de Trabajo S5Felipe Humberto Quiñones FernándezNoch keine Bewertungen
- Formato para Entregar TrabajosDokument3 SeitenFormato para Entregar Trabajoseternitxt.sookayjuntaegyu100% (1)
- Pca Matemática Décimo Egb 2019-2020Dokument10 SeitenPca Matemática Décimo Egb 2019-2020huesiti100% (1)
- Quiz 1 Semana 3 Bloque Metodos Numericos PDFDokument8 SeitenQuiz 1 Semana 3 Bloque Metodos Numericos PDFCamilo Ramirez SNoch keine Bewertungen
- RESOLUCION DE LAS LITA 02 PythonDokument10 SeitenRESOLUCION DE LAS LITA 02 PythonjuberNoch keine Bewertungen
- 6° A 18576 - Análisis - SIMCE - 2 - Matemática - Sexto - Básico - A - Colegio - Particular - Mater - DeiDokument26 Seiten6° A 18576 - Análisis - SIMCE - 2 - Matemática - Sexto - Básico - A - Colegio - Particular - Mater - DeiPilar Guerrero C.Noch keine Bewertungen
- Tema 1 Fisica Quimica Objetivo AprobarDokument13 SeitenTema 1 Fisica Quimica Objetivo AprobartupamaraNoch keine Bewertungen
- EvaluaciónDokument4 SeitenEvaluaciónigonzalezNoch keine Bewertungen
- Matematicas 1 Secundaria Semana 18Dokument2 SeitenMatematicas 1 Secundaria Semana 18r859b2hwbfNoch keine Bewertungen
- Practica Circuito RC SerieDokument9 SeitenPractica Circuito RC SerieIvanovNoch keine Bewertungen
- Tarea 1.1 Números NaturalesDokument3 SeitenTarea 1.1 Números NaturalesAle NarváezNoch keine Bewertungen
- Silabo Analisis MatematicoDokument13 SeitenSilabo Analisis MatematicoCentroFederado2012Noch keine Bewertungen
- pareceladorGRADO QUINTODokument6 SeitenpareceladorGRADO QUINTOLeonardo Alvarez100% (6)
- NUMEROS COMPLEJOS Guia2matDokument8 SeitenNUMEROS COMPLEJOS Guia2matneocronox777Noch keine Bewertungen
- Las Matematicas Explicadassolucionario PDFDokument13 SeitenLas Matematicas Explicadassolucionario PDFKing sebas0% (1)
- 3.3 3.4 3.5 Unidad III. Acecd Iem 2023Dokument25 Seiten3.3 3.4 3.5 Unidad III. Acecd Iem 2023Walter LopezNoch keine Bewertungen
- MET NUM Errores 2-21Dokument12 SeitenMET NUM Errores 2-21Pascual D MP100% (1)
- Mat 207 Grupo D Practica 1-1Dokument5 SeitenMat 207 Grupo D Practica 1-1JavierNoch keine Bewertungen
- Matematicas 2do AñoDokument12 SeitenMatematicas 2do AñoMANUELNoch keine Bewertungen
- Plan de Area Matematicas 6-7-8-9-10-11 Iea Los PastosDokument53 SeitenPlan de Area Matematicas 6-7-8-9-10-11 Iea Los PastosRicardoRoseroYepesNoch keine Bewertungen
- Luxooooooooooooooo (Reparado)Dokument29 SeitenLuxooooooooooooooo (Reparado)Luis Sergio Vargas Zeballos100% (1)
- Ejercicio Extra - Ecuación y Perdidas de Energía - Tues y WednDokument4 SeitenEjercicio Extra - Ecuación y Perdidas de Energía - Tues y WednMichael WaldoNoch keine Bewertungen
- Ejercicios Resueltos Metodos NumericosDokument8 SeitenEjercicios Resueltos Metodos NumericosEduardo Pl JzNoch keine Bewertungen
- Ecuaciones Diferenciales Lineales de Orden SuperiorDokument9 SeitenEcuaciones Diferenciales Lineales de Orden Superiorromel ponceNoch keine Bewertungen
- ReferentesDokument3 SeitenReferentestreikNoch keine Bewertungen
- Chapter 2.en - EsDokument86 SeitenChapter 2.en - EsCaroline Grande FloresNoch keine Bewertungen
- Distribución de Velocidad en Una Sección de CanalDokument7 SeitenDistribución de Velocidad en Una Sección de CanalAntonio SerquenNoch keine Bewertungen
- Silabus Braulio Matematica Enfermeria PDFDokument9 SeitenSilabus Braulio Matematica Enfermeria PDFAntony GabrielNoch keine Bewertungen