Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- TLP and ILPDokument9 SeitenTLP and ILPsiddhu8134Noch keine Bewertungen
- Spatial Patterns of Crimes in India Using Data Mining TechniquesDokument5 SeitenSpatial Patterns of Crimes in India Using Data Mining Techniquessiddhu8134Noch keine Bewertungen
- Dotnet Major Project List (Final)Dokument11 SeitenDotnet Major Project List (Final)siddhu8134Noch keine Bewertungen
- Bartlett Hris Pptto Post OnlineDokument68 SeitenBartlett Hris Pptto Post Onlinesiddhu8134Noch keine Bewertungen
- Project PlanDokument3 SeitenProject Plansiddhu8134Noch keine Bewertungen
- Girbau, S.A.: STI-54 / STI-77 Parts ManualDokument72 SeitenGirbau, S.A.: STI-54 / STI-77 Parts ManualoozbejNoch keine Bewertungen
- Mobile Assisted Language Learning (MALL) Describes An Approach To Language LearningDokument7 SeitenMobile Assisted Language Learning (MALL) Describes An Approach To Language Learninggusria ningsihNoch keine Bewertungen
- DBMS FileDokument76 SeitenDBMS FileJeremy MontgomeryNoch keine Bewertungen
- MAX220-MAX249 +5V-Powered, Multichannel RS-232 Drivers/ReceiversDokument39 SeitenMAX220-MAX249 +5V-Powered, Multichannel RS-232 Drivers/ReceiversHugo SantanaNoch keine Bewertungen
- SF Current SchemaDokument158 SeitenSF Current SchemaorafinconsultantNoch keine Bewertungen
- ATtribute Changer 7Dokument19 SeitenATtribute Changer 7manu63_Noch keine Bewertungen
- Lewis David On The Plurality of WorldsDokument279 SeitenLewis David On The Plurality of Worldsdjoseph_1Noch keine Bewertungen
- P2P Technology User's ManualDokument8 SeitenP2P Technology User's ManualElenilto Oliveira de AlmeidaNoch keine Bewertungen
- BSNL Summer Traning ReportDokument39 SeitenBSNL Summer Traning ReportMohd MunzirNoch keine Bewertungen
- Mygps: A Diy Project - Portable and Astronomy Gps Based On Arduino NanoDokument9 SeitenMygps: A Diy Project - Portable and Astronomy Gps Based On Arduino NanoadiasmesquitaNoch keine Bewertungen
- VarAC V8.0.6 Is Here! With Path Finder, Simple - Advanced UI Mode, Offline Image Shrinker, UI Themes and Much MoreDokument7 SeitenVarAC V8.0.6 Is Here! With Path Finder, Simple - Advanced UI Mode, Offline Image Shrinker, UI Themes and Much MoreuwpowerNoch keine Bewertungen
- Bangladesh Railway PDFDokument1 SeiteBangladesh Railway PDFMamun NiDNoch keine Bewertungen
- HP Pavilion 14 - x360 Touchscreen 2-In-1 Laptop - 12th Gen Intel Core I5-1235u - 1080p - Windows 11 - CostcoDokument4 SeitenHP Pavilion 14 - x360 Touchscreen 2-In-1 Laptop - 12th Gen Intel Core I5-1235u - 1080p - Windows 11 - CostcoTanish JainNoch keine Bewertungen
- Dcof Full Notes (Module 2)Dokument9 SeitenDcof Full Notes (Module 2)Minhaj KmNoch keine Bewertungen
- Chap 5 SerializationDokument7 SeitenChap 5 Serializationelwa3erNoch keine Bewertungen
- Coupling and CohesionDokument2 SeitenCoupling and CohesionDebadatta GadanayakNoch keine Bewertungen
- Online Consumer Complaint Filing: E-Filing of Complaints at Consumer Forums of IndiaDokument13 SeitenOnline Consumer Complaint Filing: E-Filing of Complaints at Consumer Forums of IndiaLAVANYA SAMPATHNoch keine Bewertungen
- Oil and Gas Reloaded: Offshore ArgentinaDokument9 SeitenOil and Gas Reloaded: Offshore ArgentinaMuhammad Fahmi AnbNoch keine Bewertungen
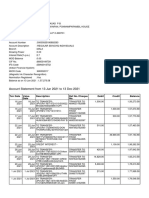
- Account Statement From 13 Jun 2021 To 13 Dec 2021Dokument10 SeitenAccount Statement From 13 Jun 2021 To 13 Dec 2021Syamprasad P BNoch keine Bewertungen
- Statement of Account: Date Tran Id Remarks UTR Number Instr. ID Withdrawals Deposits BalanceDokument8 SeitenStatement of Account: Date Tran Id Remarks UTR Number Instr. ID Withdrawals Deposits Balancedinesh namdeoNoch keine Bewertungen
- Asml 20110808 Careers Brochure ASML NLDokument12 SeitenAsml 20110808 Careers Brochure ASML NLerkin1989Noch keine Bewertungen
- Covenant UniversityDokument5 SeitenCovenant UniversityWilkie MofeNoch keine Bewertungen
- Information Security Logical DesignDokument17 SeitenInformation Security Logical DesignnskaralsathyaNoch keine Bewertungen
- Link LayerDokument58 SeitenLink LayerrajindermmathNoch keine Bewertungen
- Release Notes - READDokument3 SeitenRelease Notes - READHari KurniadiNoch keine Bewertungen
- Numerical Solution For Nonlinear MHD Jeffery-Hamel Blood Flow Problem Through Neural Networks Optimized TechniquesDokument11 SeitenNumerical Solution For Nonlinear MHD Jeffery-Hamel Blood Flow Problem Through Neural Networks Optimized TechniquesMuhammad Imran KhanNoch keine Bewertungen
- Pk232mbx Operating ManualDokument266 SeitenPk232mbx Operating ManualrdeagleNoch keine Bewertungen
- Python Go HackersDokument23 SeitenPython Go HackersAdaAdaAjeChanel33% (3)
- CaFSET (Antigua) Office Workbook - Sixth Edition - Programming Concepts Sample PagesDokument4 SeitenCaFSET (Antigua) Office Workbook - Sixth Edition - Programming Concepts Sample PagescafsetNoch keine Bewertungen
- Technote On - Communication Between M340 and ATV312 Over Modbus Using READ - VAR and WRITE - VARDokument14 SeitenTechnote On - Communication Between M340 and ATV312 Over Modbus Using READ - VAR and WRITE - VARsimbamike100% (1)