Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- LOGICAL GATES AND PLC LADDER LOGIC (38 CHARACTERSDokument19 SeitenLOGICAL GATES AND PLC LADDER LOGIC (38 CHARACTERSSerxhino KorreshiNoch keine Bewertungen
- Grand Iftar ProposalDokument7 SeitenGrand Iftar ProposalAmir FirdausNoch keine Bewertungen
- Regression Analysis Can Be Defined As The Process of Developing A MathematicalDokument21 SeitenRegression Analysis Can Be Defined As The Process of Developing A MathematicalAmir Firdaus100% (1)
- Eda ToolsDokument5 SeitenEda ToolsHarish KumarNoch keine Bewertungen
- MCT 4322 Exercise 6Dokument1 SeiteMCT 4322 Exercise 6Amir FirdausNoch keine Bewertungen
- 10 PagesDokument11 Seiten10 PagesAmir FirdausNoch keine Bewertungen
- Eng Econ Cash Flow L4 - MME 4272Dokument43 SeitenEng Econ Cash Flow L4 - MME 4272Amir FirdausNoch keine Bewertungen
- Sampling PDFDokument11 SeitenSampling PDFAmir FirdausNoch keine Bewertungen
- MCT 4322 - 03a Fuzzy RelationDokument5 SeitenMCT 4322 - 03a Fuzzy RelationAmir FirdausNoch keine Bewertungen
- Receipt - Eit Report of Mohd Amir FirdausDokument1 SeiteReceipt - Eit Report of Mohd Amir FirdausAmir FirdausNoch keine Bewertungen
- MCT 4322 - 02 Crisp and Fuzzy SetsDokument8 SeitenMCT 4322 - 02 Crisp and Fuzzy SetsAmir FirdausNoch keine Bewertungen
- Volleyball Male and FemaleDokument2 SeitenVolleyball Male and FemaleAmir FirdausNoch keine Bewertungen
- gpdk045 drc-1Dokument112 Seitengpdk045 drc-1Ajay Kumar MattupalliNoch keine Bewertungen
- Non-Volatile Memory:: A Review of Past and Present Concepts and ApplicationsDokument10 SeitenNon-Volatile Memory:: A Review of Past and Present Concepts and ApplicationsMisa 99Noch keine Bewertungen
- KEC Semiconductor Product Guide SMD PDFDokument117 SeitenKEC Semiconductor Product Guide SMD PDFaldoNoch keine Bewertungen
- DDCA - Ch3 - Class8Dokument32 SeitenDDCA - Ch3 - Class8Yerhard Lalangui FernándezNoch keine Bewertungen
- Visvesvarya National Institute of Technology Nagpur: ECE BTECH 15-19 Device Modelling Lab Assignment 4Dokument21 SeitenVisvesvarya National Institute of Technology Nagpur: ECE BTECH 15-19 Device Modelling Lab Assignment 4Ishan DarwhekarNoch keine Bewertungen
- Introduction to Logic Gates and Proteus SimulationDokument63 SeitenIntroduction to Logic Gates and Proteus SimulationasadNoch keine Bewertungen
- Digital Electronics Chapter 5Dokument30 SeitenDigital Electronics Chapter 5Pious TraderNoch keine Bewertungen
- Designing of Flip Flops: Mehran University of Engineering & Technology JamsoroDokument8 SeitenDesigning of Flip Flops: Mehran University of Engineering & Technology JamsoroAakash Devdat KolhiNoch keine Bewertungen
- VLSI CAD Flow: Logic Synthesis, Placement and Routing: Guest Lecture by Srini DevadasDokument70 SeitenVLSI CAD Flow: Logic Synthesis, Placement and Routing: Guest Lecture by Srini DevadasxperiaashNoch keine Bewertungen
- Mpi Assignment Solution1Dokument15 SeitenMpi Assignment Solution1alkesh.eng0% (1)
- ESC201T L28 MOS CircuitsDokument15 SeitenESC201T L28 MOS CircuitsRachit MahajanNoch keine Bewertungen
- MOST vs Bipolar ComparisonDokument91 SeitenMOST vs Bipolar Comparisonfangqing chenNoch keine Bewertungen
- ARM Founded in November 1990: Advanced RISC MachinesDokument27 SeitenARM Founded in November 1990: Advanced RISC MachinesArkajyoti SahaNoch keine Bewertungen
- Ecen 248 Lab 4 ReportDokument5 SeitenEcen 248 Lab 4 Reportapi-241454978100% (1)
- Optimization of Advanced Encryption Standard (AES) Using Vivado High Level Synthesis (HLS)Dokument9 SeitenOptimization of Advanced Encryption Standard (AES) Using Vivado High Level Synthesis (HLS)Anand Parakkat ParambilNoch keine Bewertungen
- Z 84 C 0006Dokument2 SeitenZ 84 C 0006José AdelinoNoch keine Bewertungen
- AE - 1.7 MOSFET Circuits - DC Biasing, AC Coupling and Small-Signal Analysis of AmplifiersDokument65 SeitenAE - 1.7 MOSFET Circuits - DC Biasing, AC Coupling and Small-Signal Analysis of AmplifiersjayanthiNoch keine Bewertungen
- Digital & Logic Design Lab OverviewDokument27 SeitenDigital & Logic Design Lab OverviewNashowan Gamal AlhadrmiNoch keine Bewertungen
- 1 Introducing Embedded Systems and The MicrocontrollersDokument23 Seiten1 Introducing Embedded Systems and The Microcontrollersनिमँलसिंह राउलजीNoch keine Bewertungen
- VDTT Books ListDokument9 SeitenVDTT Books ListbhavjNoch keine Bewertungen
- Digital Traffic Light ControllerDokument3 SeitenDigital Traffic Light Controllerjhk7888Noch keine Bewertungen
- DELD Unit I & Unit II MCQDokument39 SeitenDELD Unit I & Unit II MCQGauri TupeNoch keine Bewertungen
- Adv. Digital Circuit Design Clarkson UniversityDokument30 SeitenAdv. Digital Circuit Design Clarkson University1553Noch keine Bewertungen
- VLSIdesign AssignmentDokument2 SeitenVLSIdesign AssignmentSaisha Asolkar0% (2)
- Architecture of Fpga Altera Cyclone: BY:-Karnika Sharma Mtech (2 Year)Dokument29 SeitenArchitecture of Fpga Altera Cyclone: BY:-Karnika Sharma Mtech (2 Year)karnika143100% (1)
- 28C64Dokument19 Seiten28C64Muhammad Yunus AndrianNoch keine Bewertungen
- Lec14 DTMOSDokument88 SeitenLec14 DTMOSSalim SanNoch keine Bewertungen
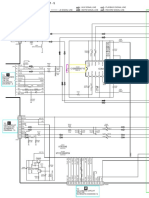
- SCHEMATIC DIAGRAM TITLEDokument2 SeitenSCHEMATIC DIAGRAM TITLERoiser DelgadoNoch keine Bewertungen