Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Ch26 ExercisesDokument14 SeitenCh26 Exercisesamisha2562585Noch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- 07 Calibration or Response Factor CalibDokument13 Seiten07 Calibration or Response Factor CalibRui SheenaNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- 5 Whys - Wikipedia, The Free EncyclopediaDokument3 Seiten5 Whys - Wikipedia, The Free EncyclopediaArya KamiNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Application of VAR Model in Macro-Econometric AnalysisDokument4 SeitenApplication of VAR Model in Macro-Econometric AnalysisInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Online FoodDokument8 SeitenOnline Foodneha agrawalNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Dissertation Timeline TemplateDokument12 SeitenDissertation Timeline Templateogechi100% (3)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Pros and Cons of Standards and National CurriculumsDokument2 SeitenPros and Cons of Standards and National CurriculumsNaeem Riaz Sultani100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- FloridathesisDokument28 SeitenFloridathesisrichardbarcinilla02Noch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- 20 Famous Indian Scientists That Shook The WorldDokument42 Seiten20 Famous Indian Scientists That Shook The WorldSridharan MNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Log Book (Science Investigatory Project)Dokument70 SeitenLog Book (Science Investigatory Project)norilyn fonte100% (1)
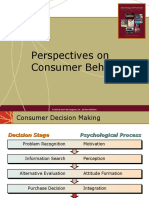
- Perspectives On Consumer Behavior: © 2003 Mcgraw-Hill Companies, Inc., Mcgraw-Hill/IrwinDokument28 SeitenPerspectives On Consumer Behavior: © 2003 Mcgraw-Hill Companies, Inc., Mcgraw-Hill/IrwinUMAR KHANNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- DD309 Tma 05Dokument10 SeitenDD309 Tma 05papanombaNoch keine Bewertungen
- Historical Context of The Emergence of Each DisciplinesDokument43 SeitenHistorical Context of The Emergence of Each DisciplinesBloodmier GabrielNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Completed LoraDokument12 SeitenCompleted LoraRONALD ARTILLERONoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Aqtf Eq1 Survey Master 000Dokument1 SeiteAqtf Eq1 Survey Master 000Yepuru ChaithanyaNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Structural Stigma and Its Impact On Healthcare For Borderline Personality Disorder: A Scoping ReviewDokument41 SeitenStructural Stigma and Its Impact On Healthcare For Borderline Personality Disorder: A Scoping Reviewconsulta.nicolaslabbeNoch keine Bewertungen
- Understanding The Quality of Life of SeniorsDokument27 SeitenUnderstanding The Quality of Life of SeniorsYen NgoNoch keine Bewertungen
- Stock Price Prediction Using Machine LearningDokument26 SeitenStock Price Prediction Using Machine LearninganiNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Synopsis by Deepanshi Shukla For Topic Cash Management at SBIDokument5 SeitenSynopsis by Deepanshi Shukla For Topic Cash Management at SBIDeepanshi ShuklaNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Presentation StrategyDokument40 SeitenPresentation StrategyAbdullah ghauriNoch keine Bewertungen
- Chapter 1Dokument23 SeitenChapter 1Sadaqat AliNoch keine Bewertungen
- Smart Meter Data AnalysisDokument306 SeitenSmart Meter Data AnalysisGurpinder Singh100% (1)
- LE Staff Supervisor's Field Guide PDFDokument114 SeitenLE Staff Supervisor's Field Guide PDFAshraf Adel Nashed ZakiNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Applying Monte Carlo Simulation To Launch Vehicle Design and Requirements VerificationDokument10 SeitenApplying Monte Carlo Simulation To Launch Vehicle Design and Requirements VerificationLeave it to ChanceNoch keine Bewertungen
- Analyzing Talk and TextDokument18 SeitenAnalyzing Talk and TextCarol OliveiraNoch keine Bewertungen
- Introduction To Quantitative AnalysisDokument14 SeitenIntroduction To Quantitative AnalysisMay Ann Agcang SabelloNoch keine Bewertungen
- Customer Loyalty IndexDokument5 SeitenCustomer Loyalty IndexGuidoNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- 3M AnalysisDokument5 Seiten3M AnalysisAritra BanerjeeNoch keine Bewertungen
- Vacuum Technology and Space Simulation NASA BookDokument315 SeitenVacuum Technology and Space Simulation NASA BookDaylenO100% (1)
- 5 Day Course Outline of Process Safety Related TopicsDokument3 Seiten5 Day Course Outline of Process Safety Related Topicskanakarao1Noch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)