Das könnte Ihnen auch gefallen
- Choix Module Rapport Des Vitesses Engrenage Droit PDFDokument2 SeitenChoix Module Rapport Des Vitesses Engrenage Droit PDFRayen BettaebNoch keine Bewertungen
- 4 Dossier ReponseDokument4 Seiten4 Dossier ReponseChokri AtefNoch keine Bewertungen
- Systemes Isostatiques PDFDokument5 SeitenSystemes Isostatiques PDFImmamHadramyNoch keine Bewertungen
- Cours MicrDokument30 SeitenCours MicrDOUNIANoch keine Bewertungen
- Cours Engrenages 2019-2020 Bis - CopieDokument42 SeitenCours Engrenages 2019-2020 Bis - CopieEl Aziz El Mehdi100% (1)
- Technique CCCDokument15 SeitenTechnique CCCNÖÚ HÄNoch keine Bewertungen
- TP 2 Solidworks Liaisons Dans Les Mecanismes p1Dokument8 SeitenTP 2 Solidworks Liaisons Dans Les Mecanismes p1Simo StitNoch keine Bewertungen
- Dess 1 Cours - Modelisation - Des - Liaisons - eDokument7 SeitenDess 1 Cours - Modelisation - Des - Liaisons - eelvis etienneNoch keine Bewertungen
- Recueil D' Épreuves DUT-BTS Mécanique - 2003Dokument19 SeitenRecueil D' Épreuves DUT-BTS Mécanique - 2003Bradley CaseNoch keine Bewertungen
- Chap 2 - Traction - Compression-1Dokument8 SeitenChap 2 - Traction - Compression-1Medeho kodjo Simon henochNoch keine Bewertungen
- 00 2STE Complet - 2021 2022Dokument38 Seiten00 2STE Complet - 2021 2022Touriya MoukhlesNoch keine Bewertungen
- TD-Poulie Embrayage Centrifuge PFDDokument5 SeitenTD-Poulie Embrayage Centrifuge PFDbhsbhs19Noch keine Bewertungen
- Cours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Dokument8 SeitenCours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Youssef CherniNoch keine Bewertungen
- 130 Engrenages PreparationDokument9 Seiten130 Engrenages PreparationIkram MisbahNoch keine Bewertungen
- Chapitre 2 - Partie 1 - CSMTDokument28 SeitenChapitre 2 - Partie 1 - CSMTsalman wardiNoch keine Bewertungen
- 02 MECA0444-EffortsTransmission PDFDokument64 Seiten02 MECA0444-EffortsTransmission PDFKhaled SouaissaNoch keine Bewertungen
- Schéma CinématiqueDokument41 SeitenSchéma CinématiquesadikiNoch keine Bewertungen
- PolyGlissiere A TrouDokument18 SeitenPolyGlissiere A TrouHassenKhlifiNoch keine Bewertungen
- Exercice BE2 Ensam MeknesDokument8 SeitenExercice BE2 Ensam MeknesThe ShadowNoch keine Bewertungen
- 21 - Le Schéma Cinématique MinimaleDokument22 Seiten21 - Le Schéma Cinématique MinimaleManal El Matmour M'hairNoch keine Bewertungen
- CS-TM1-TD Hyperstatisme Bielle Manivelle CorrectionDokument9 SeitenCS-TM1-TD Hyperstatisme Bielle Manivelle CorrectionPierre LancelotNoch keine Bewertungen
- Liaison EncastrementDokument18 SeitenLiaison Encastrementkhocine100% (1)
- S304 Trans Avec Transformation de MVTPRDokument6 SeitenS304 Trans Avec Transformation de MVTPRikram bouhadlaNoch keine Bewertungen
- Examen 2013 Correction PDFDokument10 SeitenExamen 2013 Correction PDFNassim RabaouiNoch keine Bewertungen
- Examen A05 SolutionDokument7 SeitenExamen A05 SolutionAbdallah SbaghdiNoch keine Bewertungen
- C R Reducteur 1Dokument16 SeitenC R Reducteur 1Amal AmalNoch keine Bewertungen
- Conception Mécanique - Analyse Structurelle CMDokument22 SeitenConception Mécanique - Analyse Structurelle CMsie Rachid TraoreNoch keine Bewertungen
- Chap 2 EngrenagesDokument19 SeitenChap 2 EngrenagesMhd Koundio100% (1)
- Cinématique - DM - Genie Indus - VFDokument2 SeitenCinématique - DM - Genie Indus - VFFahd LahmidiNoch keine Bewertungen
- Rondelles BellevilleDokument5 SeitenRondelles BellevilleMahrez ZaafouriNoch keine Bewertungen
- TD 1Dokument2 SeitenTD 1hello 128Noch keine Bewertungen
- 11 - Cinematique Liaisons EquivalentesDokument19 Seiten11 - Cinematique Liaisons Equivalentessaded05Noch keine Bewertungen
- Transmettre 1/2Dokument137 SeitenTransmettre 1/2Yussine JanatiNoch keine Bewertungen
- 002 Schema CinematiqueDokument5 Seiten002 Schema CinematiqueMounir Douggaz100% (1)
- Ch1 l1 Analyse Fonctionnelle ExterneDokument7 SeitenCh1 l1 Analyse Fonctionnelle ExterneezzeddineNoch keine Bewertungen
- MODELISATION CINEMATIQUE COURS SI PC 2018-2019 (Él.)Dokument10 SeitenMODELISATION CINEMATIQUE COURS SI PC 2018-2019 (Él.)Andreas NGASTE100% (1)
- CATIA V5 DocumentDokument6 SeitenCATIA V5 DocumentChokri AtefNoch keine Bewertungen
- Cours EngrenagesDokument12 SeitenCours EngrenageszohirNoch keine Bewertungen
- 00 2023 TD Révisions PTSI PTDokument8 Seiten00 2023 TD Révisions PTSI PTimadbourzamNoch keine Bewertungen
- La Liaison Glissiere (Diapos)Dokument14 SeitenLa Liaison Glissiere (Diapos)mehdiNoch keine Bewertungen
- Compléter L'actigramme A0 de La Fonction Globale D'un CompresseurDokument2 SeitenCompléter L'actigramme A0 de La Fonction Globale D'un CompresseurNoureddine HermetienNoch keine Bewertungen
- Les Liaisons Mécaniques: I. Définition III. Degrés de LibertéDokument2 SeitenLes Liaisons Mécaniques: I. Définition III. Degrés de Libertéjawaher100% (2)
- Act (Fraiseuse Universelle) P137-142Dokument6 SeitenAct (Fraiseuse Universelle) P137-142Kereme JulienNoch keine Bewertungen
- FDokument13 SeitenFAziz AidaraNoch keine Bewertungen
- TP Treuil ProfDokument6 SeitenTP Treuil ProfmidounNoch keine Bewertungen
- Train Epicycloidal Simple PDFDokument4 SeitenTrain Epicycloidal Simple PDFEdgar ÉtapeNoch keine Bewertungen
- Etau D ModelisteDokument23 SeitenEtau D ModelisteYoro Boubou SIDIBENoch keine Bewertungen
- FS Statique Plane Resolution GraphiqueDokument2 SeitenFS Statique Plane Resolution Graphiquejsp10Noch keine Bewertungen
- CC1 Im1 Ie1 17 18Dokument1 SeiteCC1 Im1 Ie1 17 18Hamza RimiNoch keine Bewertungen
- 32 Loi Entrée Sortie Géométrique D 1Dokument6 Seiten32 Loi Entrée Sortie Géométrique D 1hsn frk100% (1)
- Cahier Dexercices (2019)Dokument31 SeitenCahier Dexercices (2019)lounesNoch keine Bewertungen
- (M06b) Statique GraphiqueDokument2 Seiten(M06b) Statique GraphiqueFaustin Kouassi100% (1)
- TD Statique CinématiqueDokument5 SeitenTD Statique CinématiqueNour Allah tabibNoch keine Bewertungen
- 0822 Cinem:08 CinematiquePlane - PdfatiqueplaneDokument7 Seiten0822 Cinem:08 CinematiquePlane - PdfatiqueplanePorata UiopaNoch keine Bewertungen
- Exercices Partie1Dokument8 SeitenExercices Partie1Paola CinnellaNoch keine Bewertungen
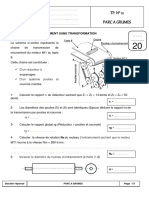
- Parc A GrumesDokument3 SeitenParc A Grumeslou louNoch keine Bewertungen
- Polycopie de TD 2013Dokument70 SeitenPolycopie de TD 2013hichamkabel100% (1)
- Concours Blanc NacelleDokument8 SeitenConcours Blanc NacelleILYASS NSRTNoch keine Bewertungen
- 01 Tour ParalleleDokument7 Seiten01 Tour ParallelekhocineNoch keine Bewertungen
- Call FlowsDokument73 SeitenCall FlowsSamuel OhabunwaNoch keine Bewertungen
- Document Methodologie PDFDokument44 SeitenDocument Methodologie PDFSAINTE ELISABETHNoch keine Bewertungen
- tp3 FinalDokument27 Seitentp3 Finallando de chanceNoch keine Bewertungen
- Modelisation Du Laminage A Froid Des Aciers. Etude Des Aspects Metallurgiques. Analyse Par La Methode Des TranchesDokument7 SeitenModelisation Du Laminage A Froid Des Aciers. Etude Des Aspects Metallurgiques. Analyse Par La Methode Des TranchesphukaifrNoch keine Bewertungen
- Global 20131002Dokument44 SeitenGlobal 20131002m_giudiceNoch keine Bewertungen
- 1 Introduction Base de DonneesDokument16 Seiten1 Introduction Base de Donneesapi-26420184100% (1)
- L2 Éco - MicroéconomieDokument2 SeitenL2 Éco - MicroéconomieNoel RaharinantenainaNoch keine Bewertungen
- Chapitre 1: Les Autres Systèmes Comptables: 1-Le Système CentralisateurDokument12 SeitenChapitre 1: Les Autres Systèmes Comptables: 1-Le Système CentralisateurStéphane OhambaNoch keine Bewertungen
- TD PDPDokument6 SeitenTD PDPsamir67% (3)
- Rapport de Stage (SG)Dokument33 SeitenRapport de Stage (SG)Zakaria Zerradi Mansouri50% (2)
- Chapitre 3 Les GranulatsDokument20 SeitenChapitre 3 Les Granulatsatamed32100% (1)
- Droit Social 3-1 PDFDokument35 SeitenDroit Social 3-1 PDFIcare MendozaNoch keine Bewertungen
- WPL - Guid Maintenance Operation 08AUg12Dokument20 SeitenWPL - Guid Maintenance Operation 08AUg12Hedi Ben MohamedNoch keine Bewertungen
- Comment Flasher Une Carte Artillery RubyDokument9 SeitenComment Flasher Une Carte Artillery RubyStéphane CavillotNoch keine Bewertungen
- Chapitre 1 Applications IndustriellesDokument9 SeitenChapitre 1 Applications Industriellesmosbahmessaoui1861Noch keine Bewertungen
- Pfe Final WordDokument82 SeitenPfe Final WordSallma OuitkaNoch keine Bewertungen
- Rapport Annuel 2017 PDFDokument289 SeitenRapport Annuel 2017 PDFguymbulaNoch keine Bewertungen
- IFRS 40%-ConvertiDokument13 SeitenIFRS 40%-ConvertiIdrissa MbayeNoch keine Bewertungen
- Poly Edp Ense3 LefrancDokument118 SeitenPoly Edp Ense3 LefrancJuan David PabonNoch keine Bewertungen
- Chauffage3 - Regulation Par Loi DeauDokument7 SeitenChauffage3 - Regulation Par Loi DeauZEMOURI ABDELHAKIMNoch keine Bewertungen
- LE08437ACDokument104 SeitenLE08437ACHenry Roger Sanchez AguilarNoch keine Bewertungen
- Le Onecoin, La Cryptoqueen Et L'arnaque À 4 Milliards de DollarsDokument1 SeiteLe Onecoin, La Cryptoqueen Et L'arnaque À 4 Milliards de DollarsContemporanea RadiodamusNoch keine Bewertungen
- AssainiDokument5 SeitenAssainiYassmine AouidjNoch keine Bewertungen
- Chap4 TransactionACIDDokument27 SeitenChap4 TransactionACIDSamia BlumNoch keine Bewertungen
- Comment Fabriquer Un Savon de Protection ? Savoir Vivre Spiritualité PDFDokument4 SeitenComment Fabriquer Un Savon de Protection ? Savoir Vivre Spiritualité PDFHadji BienfaiteurNoch keine Bewertungen
- TD2 FiltresDokument4 SeitenTD2 FiltresAya HafsiNoch keine Bewertungen
- Chapitre III Les Transferts D'énergie Et de Matières Dans Les EcosystèmesDokument5 SeitenChapitre III Les Transferts D'énergie Et de Matières Dans Les EcosystèmesAnthony MaryNoch keine Bewertungen
- Hydraulique 1Dokument64 SeitenHydraulique 1youssef12zakaNoch keine Bewertungen
- Les GraphesDokument11 SeitenLes GraphesAbdo AlNoch keine Bewertungen
- Cours Droit Penal Du Travail Cadre SynthetiqueDokument41 SeitenCours Droit Penal Du Travail Cadre SynthetiqueAragsan HousseinNoch keine Bewertungen