Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
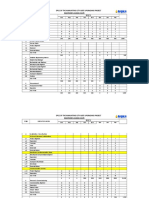
- Manpower HistogramDokument15 SeitenManpower HistogramZaem Afifi100% (3)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- NASCC: The Virtual Steel Conference: To Earn PDH CreditDokument1 SeiteNASCC: The Virtual Steel Conference: To Earn PDH CreditAhmedNoch keine Bewertungen
- Ambient Vibration Survey of The Bosporus Suspension Bridge: J. M. W. BrownjohnDokument21 SeitenAmbient Vibration Survey of The Bosporus Suspension Bridge: J. M. W. BrownjohnAhmedNoch keine Bewertungen
- Dear Reader,: Knits Photo Shoot That Didn't Include Models. If You Go Back andDokument1 SeiteDear Reader,: Knits Photo Shoot That Didn't Include Models. If You Go Back andAhmedNoch keine Bewertungen
- Ideapad S740 15IRH Touch SpecDokument1 SeiteIdeapad S740 15IRH Touch SpecAhmedNoch keine Bewertungen
- ZWF81251WX Front Loaded WM: Tc2 8 KG 1200 RPM WhiteDokument1 SeiteZWF81251WX Front Loaded WM: Tc2 8 KG 1200 RPM WhiteAhmedNoch keine Bewertungen
- Wildmonth: The Nights May Be Drawing in and Temperatures Dropping, But There Is Still So Much To SeeDokument2 SeitenWildmonth: The Nights May Be Drawing in and Temperatures Dropping, But There Is Still So Much To SeeAhmedNoch keine Bewertungen
- ThinkBook 13s-IWL Single Model 201911091355Dokument3 SeitenThinkBook 13s-IWL Single Model 201911091355AhmedNoch keine Bewertungen
- English 04Dokument2 SeitenEnglish 04AhmedNoch keine Bewertungen
- N Style: For The Chance To Win A Thule Sapling Elite Child Carrier, VisitDokument2 SeitenN Style: For The Chance To Win A Thule Sapling Elite Child Carrier, VisitAhmedNoch keine Bewertungen
- Ideapad S740Dokument3 SeitenIdeapad S740AhmedNoch keine Bewertungen
- English 08Dokument2 SeitenEnglish 08AhmedNoch keine Bewertungen
- 10 Windows Tips and Tricks That Help You Get Stuff Done Faster 10 Truly Helpful Windows 10 Tools You Might Not Know AboutDokument2 Seiten10 Windows Tips and Tricks That Help You Get Stuff Done Faster 10 Truly Helpful Windows 10 Tools You Might Not Know AboutAhmedNoch keine Bewertungen
- N EI L) : Figure 4.6.3.2 Effective Length Factors For Members For Idealized Conditions of End RestraintDokument2 SeitenN EI L) : Figure 4.6.3.2 Effective Length Factors For Members For Idealized Conditions of End RestraintAhmedNoch keine Bewertungen
- English 402Dokument2 SeitenEnglish 402AhmedNoch keine Bewertungen
- Do Children Have A Better Sense of Smell Than Adults?: Will Electric Cars Reduce Pollution?Dokument2 SeitenDo Children Have A Better Sense of Smell Than Adults?: Will Electric Cars Reduce Pollution?AhmedNoch keine Bewertungen
- Essential Kitchens: February 2018 Issue 262Dokument2 SeitenEssential Kitchens: February 2018 Issue 262AhmedNoch keine Bewertungen
- List of Mathematical ConstantsDokument2 SeitenList of Mathematical ConstantsAhmedNoch keine Bewertungen
- How To Fight With Conkers!: An Unusual English Game and PastimeDokument1 SeiteHow To Fight With Conkers!: An Unusual English Game and PastimeAhmedNoch keine Bewertungen
- Present Continuous: Like UsDokument1 SeitePresent Continuous: Like UsAhmedNoch keine Bewertungen
- What'S Your Country Number-One For?: Pre-ReadingDokument2 SeitenWhat'S Your Country Number-One For?: Pre-ReadingAhmedNoch keine Bewertungen
- EI L GJ EI L: Are Given in Paragraph H4 of Appendix HDokument3 SeitenEI L GJ EI L: Are Given in Paragraph H4 of Appendix HAhmedNoch keine Bewertungen
- 4.4.2.3 Moment Amplification For A Sway Member For A Sway Member, The Design Bending MomentDokument2 Seiten4.4.2.3 Moment Amplification For A Sway Member For A Sway Member, The Design Bending MomentAhmedNoch keine Bewertungen
- English 119Dokument1 SeiteEnglish 119AhmedNoch keine Bewertungen
- English 98Dokument1 SeiteEnglish 98AhmedNoch keine Bewertungen
- ... For Your Employees!: Wherever Your Company Is Based, We Can Help. Contact Us NOW and Put Us To The Test!Dokument1 Seite... For Your Employees!: Wherever Your Company Is Based, We Can Help. Contact Us NOW and Put Us To The Test!AhmedNoch keine Bewertungen
- Supplier Categories ListDokument5 SeitenSupplier Categories ListShruti ChohanNoch keine Bewertungen
- Lysaght Bondek User GuideDokument12 SeitenLysaght Bondek User GuideSiu SiuNoch keine Bewertungen
- O, LO, To 360 Parts Catalog PC 306 2Dokument87 SeitenO, LO, To 360 Parts Catalog PC 306 2joliverosherNoch keine Bewertungen
- Drilling ProblemsDokument82 SeitenDrilling ProblemsMohamed KamalNoch keine Bewertungen
- 328750852089918-Working HydraulicsDokument9 Seiten328750852089918-Working HydraulicsBestway Equipment RepairingNoch keine Bewertungen
- V. Project Profile and Analysis 5.1 Historical Background: Commonwealth To Post-Commonwealth EraDokument32 SeitenV. Project Profile and Analysis 5.1 Historical Background: Commonwealth To Post-Commonwealth EraMr. ManaloNoch keine Bewertungen
- TFP260 05 2017Dokument4 SeitenTFP260 05 2017elraflesNoch keine Bewertungen
- PO1541 - Ojas Infra GSF - MV Cable Marking and Drum Label v1.0Dokument6 SeitenPO1541 - Ojas Infra GSF - MV Cable Marking and Drum Label v1.0Sanjay GadhaveNoch keine Bewertungen
- Underwater ConstructionDokument38 SeitenUnderwater ConstructionAradhana SinghNoch keine Bewertungen
- Broady 3500 BrochureDokument12 SeitenBroady 3500 Brochureahmedm2020Noch keine Bewertungen
- Projection WeldDokument20 SeitenProjection WeldCebrac ItatibaNoch keine Bewertungen
- Oi/N Malaysia Final Examination: SessionDokument10 SeitenOi/N Malaysia Final Examination: Sessionsharif100% (1)
- Jana Jagriti Basic SchoolDokument16 SeitenJana Jagriti Basic Schoolrajendra moktanNoch keine Bewertungen
- Metric Hex Bolt ChartsDokument1 SeiteMetric Hex Bolt ChartsPraburamNoch keine Bewertungen
- Goel TMT Physical Report-SignedDokument4 SeitenGoel TMT Physical Report-Signedsitaramap10 sathupallyNoch keine Bewertungen
- Interior Design - Case StudyDokument15 SeitenInterior Design - Case StudyManasviJindalNoch keine Bewertungen
- Appendix - I (See Paragraph - 6) Form - 1Dokument11 SeitenAppendix - I (See Paragraph - 6) Form - 1Vishnu PatidarNoch keine Bewertungen
- Well Control: BOP Accumulator Unit (Koomey Unit)Dokument12 SeitenWell Control: BOP Accumulator Unit (Koomey Unit)faraj100% (1)
- JDE 12 - Design of ColumnsDokument47 SeitenJDE 12 - Design of Columnsyedida viswanadhNoch keine Bewertungen
- Luxury Appartments BOQ PDF Rev.1Dokument38 SeitenLuxury Appartments BOQ PDF Rev.1Nazir Ahmed Mahar0% (1)
- Cebex Cable Grout - FosrocDokument4 SeitenCebex Cable Grout - FosrocIrshadYasinNoch keine Bewertungen
- Train Embankment Loads in DeepEXDokument8 SeitenTrain Embankment Loads in DeepEXM Sajid IqbalNoch keine Bewertungen
- Pressostat Steer - GeearDokument240 SeitenPressostat Steer - GeearПетр ШкильNoch keine Bewertungen
- PUMPS ProblemsDokument1 SeitePUMPS ProblemsGeorge Isaac McQuilesNoch keine Bewertungen
- PC 406 2Dokument133 SeitenPC 406 2JacksonNoch keine Bewertungen
- Bryant Ba13na0600ng Article 1470385911092 en SsDokument18 SeitenBryant Ba13na0600ng Article 1470385911092 en SsFany RsNoch keine Bewertungen
- Attachment Ref Book - Ver1.3Dokument89 SeitenAttachment Ref Book - Ver1.3mikeNoch keine Bewertungen
- Engine PartsDokument28 SeitenEngine PartsBrandiece 'Dee Dee' Berry100% (1)
- Waste Management at Construction SiteDokument5 SeitenWaste Management at Construction SiteAmbalal DhongadiNoch keine Bewertungen