Das könnte Ihnen auch gefallen
- Elements of Analytical Photogrammetry: Exterior OrientationDokument11 SeitenElements of Analytical Photogrammetry: Exterior OrientationTrai Agin LitirNoch keine Bewertungen
- Understanding the Building Construction Process: Simply ExplainedVon EverandUnderstanding the Building Construction Process: Simply ExplainedNoch keine Bewertungen
- Gps Positioning and SurveyingDokument62 SeitenGps Positioning and SurveyinglisahunNoch keine Bewertungen
- CalSurv1657 PDFDokument48 SeitenCalSurv1657 PDFVinu PetrisorNoch keine Bewertungen
- ENGO 431 - Sample Questions: Chapters 1-4: Yman AbibDokument4 SeitenENGO 431 - Sample Questions: Chapters 1-4: Yman AbibgeomongoliaNoch keine Bewertungen
- MPSC CIVIL Engineering MAINS Comprehensive BooksDokument17 SeitenMPSC CIVIL Engineering MAINS Comprehensive BooksvishalNoch keine Bewertungen
- Basic Survey MathDokument21 SeitenBasic Survey MathLuis OrtizNoch keine Bewertungen
- Surveying Problems and Solutions PDF Wordpresscom - 59c51eef1723dd2b1c9e659b PDFDokument2 SeitenSurveying Problems and Solutions PDF Wordpresscom - 59c51eef1723dd2b1c9e659b PDFElias Otieno0% (1)
- Review of Srilankan DatumDokument89 SeitenReview of Srilankan Datummadumad1234Noch keine Bewertungen
- Advanced SurveyingDokument176 SeitenAdvanced SurveyingSelvakumarNoch keine Bewertungen
- OCE552 - Geographic Information System (Ripped From Amazon Kindle Ebooks by Sai Seena)Dokument172 SeitenOCE552 - Geographic Information System (Ripped From Amazon Kindle Ebooks by Sai Seena)Mohammed HasheemNoch keine Bewertungen
- Spatial Database Management System - BlackFridayWebDokument26 SeitenSpatial Database Management System - BlackFridayWebblackfridaywebNoch keine Bewertungen
- Torsion, Bending and Buckling of Steel Beams by Trahair 1997Dokument6 SeitenTorsion, Bending and Buckling of Steel Beams by Trahair 1997fahmi aballiNoch keine Bewertungen
- California PhogrammetryDokument63 SeitenCalifornia PhogrammetryNurul AmirahNoch keine Bewertungen
- Leica Surveying Made EasyDokument36 SeitenLeica Surveying Made EasyVali ComanNoch keine Bewertungen
- Surveying Exam Preparation 01Dokument5 SeitenSurveying Exam Preparation 01jjpaul0% (1)
- 07 RasterDokument33 Seiten07 RasterNawir SyarifNoch keine Bewertungen
- BRH Survey Comps Textbook 0Dokument291 SeitenBRH Survey Comps Textbook 0Gudeta JifaraNoch keine Bewertungen
- MATLAB Statistics ToolboxDokument9 SeitenMATLAB Statistics ToolboxFari AlexNoch keine Bewertungen
- Control Surveying 1Dokument220 SeitenControl Surveying 1Madaraka DecheNoch keine Bewertungen
- Surveying Topics FEExam Review 2012 FallDokument17 SeitenSurveying Topics FEExam Review 2012 FallGilbert CerezoNoch keine Bewertungen
- A Practical Guide For Using InRoads V8iDokument472 SeitenA Practical Guide For Using InRoads V8iCarlos Andres100% (1)
- Bec 401 Thesis Ii: TOPIC: Accuracy Comparison Between Ground Control Survey and Differential Global Positioning SystemDokument39 SeitenBec 401 Thesis Ii: TOPIC: Accuracy Comparison Between Ground Control Survey and Differential Global Positioning SystemAlvinchiew CSNoch keine Bewertungen
- Lecture3 Spatial Data AnalysisDokument23 SeitenLecture3 Spatial Data AnalysisOsmund MwangupiliNoch keine Bewertungen
- Surveying With GPS, TS, TlsDokument55 SeitenSurveying With GPS, TS, TlsYurio WindiatmokoNoch keine Bewertungen
- Survey ManualDokument44 SeitenSurvey ManualMonika AcharyaNoch keine Bewertungen
- An Introduction To Horizontal Control Survey Techniques: J. Paul Guyer, P.E., R.ADokument43 SeitenAn Introduction To Horizontal Control Survey Techniques: J. Paul Guyer, P.E., R.AemmanuelNoch keine Bewertungen
- 2020-21 Mechanical Engineering SyllabusDokument220 Seiten2020-21 Mechanical Engineering SyllabusRahul KarthikNoch keine Bewertungen
- PSM1 - Geoid Based Seamless Vertical Datum For Marine Cadastre ApplicationDokument26 SeitenPSM1 - Geoid Based Seamless Vertical Datum For Marine Cadastre ApplicationAmsyar AbdullahNoch keine Bewertungen
- Site Surveying and Levelling John ClansyDokument36 SeitenSite Surveying and Levelling John ClansyJohn William TolentinoNoch keine Bewertungen
- Find opportunities and partners in UAE construction with intelligenceDokument13 SeitenFind opportunities and partners in UAE construction with intelligenceMathimuvanNoch keine Bewertungen
- Crandall Text-Book On Geodesy and Least Squares (1907 (c1906) )Dokument380 SeitenCrandall Text-Book On Geodesy and Least Squares (1907 (c1906) )Marcelo Silvano de CamargoNoch keine Bewertungen
- Final M.Tech Thesis - Asim Bashir (Roll No. 14210022) PDFDokument173 SeitenFinal M.Tech Thesis - Asim Bashir (Roll No. 14210022) PDFRaviKanthSrivastavNoch keine Bewertungen
- Advanced GRE Math Questions - Version 3Dokument25 SeitenAdvanced GRE Math Questions - Version 3Vladimir BosiljevacNoch keine Bewertungen
- Static GPS/GNSS Survey Methods Manual: Ian Lauer (Idaho State University)Dokument16 SeitenStatic GPS/GNSS Survey Methods Manual: Ian Lauer (Idaho State University)Jamhur SudjanaNoch keine Bewertungen
- Control Networks As A Basis For Mapping 1. Horizontal Control NetworksDokument7 SeitenControl Networks As A Basis For Mapping 1. Horizontal Control NetworksGathuita LeonNoch keine Bewertungen
- AutoCAD Civil 3D - CuldesacDokument8 SeitenAutoCAD Civil 3D - CuldesacSantosh RaiNoch keine Bewertungen
- Integrating BIM and LiDAR For Real-Time Construction Quality ControlDokument16 SeitenIntegrating BIM and LiDAR For Real-Time Construction Quality Controljohn florezNoch keine Bewertungen
- Manual For Streets 2Dokument144 SeitenManual For Streets 2johnbullasNoch keine Bewertungen
- Meaning of Cadastral SurveyDokument11 SeitenMeaning of Cadastral SurveyTuan NurhanisahNoch keine Bewertungen
- Relational DBMS: Motivating QuestionsDokument33 SeitenRelational DBMS: Motivating QuestionsamihsaNoch keine Bewertungen
- Soil Lab. ManualDokument32 SeitenSoil Lab. Manualishaq kazeemNoch keine Bewertungen
- Unit 4 Chainn SurveyingDokument8 SeitenUnit 4 Chainn SurveyingMausam JhaNoch keine Bewertungen
- V. S. B Engineering College CAD/CAM Lab ManualDokument121 SeitenV. S. B Engineering College CAD/CAM Lab ManualvinodkumarNoch keine Bewertungen
- Geomatics Engineering - A Practical Guide To Project DesignDokument298 SeitenGeomatics Engineering - A Practical Guide To Project DesignChaitra A RNoch keine Bewertungen
- Geodetic Coordinate CalculationsDokument47 SeitenGeodetic Coordinate CalculationsAimanNoch keine Bewertungen
- InRoads Design - Guidelines PDFDokument206 SeitenInRoads Design - Guidelines PDFThiago Aires MendesNoch keine Bewertungen
- Engineering Geology Lab ManualDokument65 SeitenEngineering Geology Lab ManualRevanth SP100% (1)
- Chapter 4 Distributed ForcesDokument39 SeitenChapter 4 Distributed ForcesRenu SekaranNoch keine Bewertungen
- Beam TheoryDokument61 SeitenBeam Theorysaleemm_2Noch keine Bewertungen
- Ch07 SolutionDokument7 SeitenCh07 SolutionDaniel CenicerosNoch keine Bewertungen
- Solution of TrianglesDokument57 SeitenSolution of TrianglesAvishkar JaiswalNoch keine Bewertungen
- Chapter 3 Spatial Descriptions and Transformations PDFDokument33 SeitenChapter 3 Spatial Descriptions and Transformations PDFOmar AL JabaiNoch keine Bewertungen
- Using Vanishing Points For Camera CalibrationDokument13 SeitenUsing Vanishing Points For Camera CalibrationYoungKimNoch keine Bewertungen
- Math of PhotogrammetryDokument16 SeitenMath of PhotogrammetryNICLASNoch keine Bewertungen
- Odetic PSIPDokument3 SeitenOdetic PSIPdufrenoisNoch keine Bewertungen
- Autocalibration of An Ad Hoc Construction of Multi-Projector DisplaysDokument8 SeitenAutocalibration of An Ad Hoc Construction of Multi-Projector DisplaysIonuț AvramescuNoch keine Bewertungen
- Mikulski Stanislaw Laser 11Dokument7 SeitenMikulski Stanislaw Laser 11NuegatteNoch keine Bewertungen
- Stereo Vision-Estimation of Disparity: Advanced Computer Vision Course MEC - 301/2Dokument29 SeitenStereo Vision-Estimation of Disparity: Advanced Computer Vision Course MEC - 301/2Rekha JayaprakashNoch keine Bewertungen
- Tracking Articulated Motion with Extremal ContoursDokument10 SeitenTracking Articulated Motion with Extremal ContoursCyrille LamasséNoch keine Bewertungen
- Land Use RegulationDokument74 SeitenLand Use RegulationKen Lim100% (2)
- StarnetDokument60 SeitenStarnetSamet ÇiftçiNoch keine Bewertungen
- General Knowledge Sports QuizDokument69 SeitenGeneral Knowledge Sports QuizKen LimNoch keine Bewertungen
- GpsDokument9 SeitenGpscodernemesisNoch keine Bewertungen
- Quantifying errors in seafloor surveysDokument18 SeitenQuantifying errors in seafloor surveysKen LimNoch keine Bewertungen
- HOW Works: Distance Rate X TimeDokument1 SeiteHOW Works: Distance Rate X TimeRene HzNoch keine Bewertungen
- Surveying BEC102 8 - RouteDokument20 SeitenSurveying BEC102 8 - RoutejfejfeNoch keine Bewertungen
- Land Use Planning Impacts on Manila's Land and Real Estate MarketDokument54 SeitenLand Use Planning Impacts on Manila's Land and Real Estate MarketChristian Delos Reyes Tagulao0% (1)
- Photogrammetry Mathematics 080116Dokument128 SeitenPhotogrammetry Mathematics 080116Ken Lim100% (1)
- Find A Position Using GPSDokument4 SeitenFind A Position Using GPSKen Lim100% (1)
- Random Error PropagationDokument13 SeitenRandom Error PropagationKen LimNoch keine Bewertungen
- FasfsafsadffasfasfsafsadfDokument173 SeitenFasfsafsadffasfasfsafsadfKen LimNoch keine Bewertungen
- Earth Curvature and Atmospheric Refraction Effects On Radar Signal PropagationDokument40 SeitenEarth Curvature and Atmospheric Refraction Effects On Radar Signal PropagationKen LimNoch keine Bewertungen
- PhilippinesDokument45 SeitenPhilippinesAhimbisibwe BakerNoch keine Bewertungen
- StarnetDokument60 SeitenStarnetSamet ÇiftçiNoch keine Bewertungen
- Leveling TheoryDokument10 SeitenLeveling TheoryKen LimNoch keine Bewertungen
- CollimationDokument1 SeiteCollimationKen LimNoch keine Bewertungen
- FM002Dokument1 SeiteFM002Vikas NagareNoch keine Bewertungen
- SurveyingagaergagDokument11 SeitenSurveyingagaergagKen LimNoch keine Bewertungen
- BASIC MEASUREMENTSDokument20 SeitenBASIC MEASUREMENTSkateborghiNoch keine Bewertungen
- Lab2 Lecture2 LevelingDokument18 SeitenLab2 Lecture2 LevelingKen LimNoch keine Bewertungen
- Basics of Least SquaresDokument6 SeitenBasics of Least SquaresKen LimNoch keine Bewertungen
- Gis Ins IntegrationDokument14 SeitenGis Ins IntegrationKen LimNoch keine Bewertungen
- GPS500 General GuideDokument42 SeitenGPS500 General GuideKen LimNoch keine Bewertungen
- Geo Do Sy and Geo Matics Engineering ProgramDokument9 SeitenGeo Do Sy and Geo Matics Engineering ProgramKen LimNoch keine Bewertungen
- Din 18723din 18723din 18723Dokument1 SeiteDin 18723din 18723din 18723Ken LimNoch keine Bewertungen
- Advanced Surveying SolutionsDokument17 SeitenAdvanced Surveying SolutionsKen Lim100% (1)
- Basics of Least SquaresDokument6 SeitenBasics of Least SquaresKen LimNoch keine Bewertungen
- Amniotic Membrane in Oral and Maxillofacial SurgeryDokument13 SeitenAmniotic Membrane in Oral and Maxillofacial SurgerySooraj SNoch keine Bewertungen
- 7 Equity Futures and Delta OneDokument65 Seiten7 Equity Futures and Delta OneBarry HeNoch keine Bewertungen
- Amma dedicates 'Green Year' to environmental protection effortsDokument22 SeitenAmma dedicates 'Green Year' to environmental protection effortsOlivia WilliamsNoch keine Bewertungen
- tsb16 0008 PDFDokument1 Seitetsb16 0008 PDFCandy QuailNoch keine Bewertungen
- Skype Sex - Date of Birth - Nationality: Curriculum VitaeDokument4 SeitenSkype Sex - Date of Birth - Nationality: Curriculum VitaeSasa DjurasNoch keine Bewertungen
- 1 20《经济学家》读译参考Dokument62 Seiten1 20《经济学家》读译参考xinying94Noch keine Bewertungen
- 14 - Hydraulic Design of Urban Drainage Systems PDFDokument45 Seiten14 - Hydraulic Design of Urban Drainage Systems PDFDeprizon SyamsunurNoch keine Bewertungen
- Checklist For Mold RemediationDokument2 SeitenChecklist For Mold Remediation631052Noch keine Bewertungen
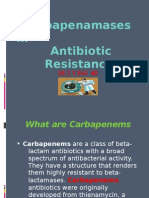
- Carbapenamses in Antibiotic ResistanceDokument53 SeitenCarbapenamses in Antibiotic Resistancetummalapalli venkateswara raoNoch keine Bewertungen
- Earth and Beyond PDFDokument5 SeitenEarth and Beyond PDFNithyananda Prabhu100% (1)
- Digestive System Song by MR ParrDokument2 SeitenDigestive System Song by MR ParrRanulfo MayolNoch keine Bewertungen
- PCG Master Consultancy Services AgreementDokument12 SeitenPCG Master Consultancy Services Agreementawscobie100% (1)
- Insert BondingDokument14 SeitenInsert BondingHelpful HandNoch keine Bewertungen
- Product Data: T T 13 SEER Single - Packaged Heat Pump R (R - 410A) RefrigerantDokument36 SeitenProduct Data: T T 13 SEER Single - Packaged Heat Pump R (R - 410A) RefrigerantJesus CantuNoch keine Bewertungen
- Audi A3 Quick Reference Guide: Adjusting Front SeatsDokument4 SeitenAudi A3 Quick Reference Guide: Adjusting Front SeatsgordonjairoNoch keine Bewertungen
- Team Dynamics and Behaviors for Global ExpansionDokument15 SeitenTeam Dynamics and Behaviors for Global ExpansionNguyênNoch keine Bewertungen
- METRIC_ENGLISHDokument14 SeitenMETRIC_ENGLISHKehinde AdebayoNoch keine Bewertungen
- Government of The Punjab Primary & Secondary Healthcare DepartmentDokument3 SeitenGovernment of The Punjab Primary & Secondary Healthcare DepartmentYasir GhafoorNoch keine Bewertungen
- Mercury QCDokument23 SeitenMercury QCMarcus MeyerNoch keine Bewertungen
- Roll Covering Letter LathiaDokument6 SeitenRoll Covering Letter LathiaPankaj PandeyNoch keine Bewertungen
- 2019 ASME Section V ChangesDokument61 Seiten2019 ASME Section V Changesmanisami7036100% (4)
- 1 Univalent Functions The Elementary Theory 2018Dokument12 Seiten1 Univalent Functions The Elementary Theory 2018smpopadeNoch keine Bewertungen
- © 2020 Lippincott Advisor Nursing Care Plans For Medical Diagnoses - Coronavirus Disease 2019 (COVID 19) PDFDokument7 Seiten© 2020 Lippincott Advisor Nursing Care Plans For Medical Diagnoses - Coronavirus Disease 2019 (COVID 19) PDFVette Angelikka Dela CruzNoch keine Bewertungen
- Ceccato Original Parts CatalogDokument68 SeitenCeccato Original Parts CatalogRamon Sanhueza67% (3)
- Solidwork Flow Simulation TutorialDokument298 SeitenSolidwork Flow Simulation TutorialMilad Ah100% (8)
- Expected OutcomesDokument4 SeitenExpected OutcomesPankaj MahantaNoch keine Bewertungen
- 1 s2.0 S0959652619316804 MainDokument11 Seiten1 s2.0 S0959652619316804 MainEmma RouyreNoch keine Bewertungen
- CONNECTIFYDokument3 SeitenCONNECTIFYAbhishek KulshresthaNoch keine Bewertungen
- Manuais - 727312 - manuais-Raios-X AXR - 77000001249Dokument72 SeitenManuais - 727312 - manuais-Raios-X AXR - 77000001249Hosam Ahmed HashimNoch keine Bewertungen
- Export - Import Cycle - PPSXDokument15 SeitenExport - Import Cycle - PPSXMohammed IkramaliNoch keine Bewertungen