Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Support of Roof and Side in Belowground Coal MinesDokument5 SeitenSupport of Roof and Side in Belowground Coal MinesNavdeep MandalNoch keine Bewertungen
- User Manual ManoScanDokument58 SeitenUser Manual ManoScanNurul FathiaNoch keine Bewertungen
- An1914 PDFDokument56 SeitenAn1914 PDFUpama Das100% (1)
- Sensory Play Activities Kids Will LoveDokument5 SeitenSensory Play Activities Kids Will LoveGoh KokMingNoch keine Bewertungen
- 67 9268Dokument34 Seiten67 9268Salvador ReyesNoch keine Bewertungen
- Accuracy of Transferring Analog Dental Casts To A Virtual ArticulatorDokument9 SeitenAccuracy of Transferring Analog Dental Casts To A Virtual ArticulatorNetra TaleleNoch keine Bewertungen
- RegistryDokument4 SeitenRegistryRajan KhandelwalNoch keine Bewertungen
- Manual Safety Installation Operations Tescom en 123946Dokument23 SeitenManual Safety Installation Operations Tescom en 123946Karikalan JayNoch keine Bewertungen
- A A ADokument5 SeitenA A ASalvador__DaliNoch keine Bewertungen
- Test Bank For Macroeconomics 8th Canadian Edition Andrew AbelDokument16 SeitenTest Bank For Macroeconomics 8th Canadian Edition Andrew AbelstebinrothNoch keine Bewertungen
- AWANA Handbook 2010-2011Dokument8 SeitenAWANA Handbook 2010-2011carriepratchard100% (1)
- 1st Quarter 2016 Lesson 5 Powerpoint With Tagalog NotesDokument25 Seiten1st Quarter 2016 Lesson 5 Powerpoint With Tagalog NotesRitchie FamarinNoch keine Bewertungen
- A Review of Automatic License Plate Recognition System in Mobile-Based PlatformDokument6 SeitenA Review of Automatic License Plate Recognition System in Mobile-Based PlatformadiaNoch keine Bewertungen
- Centiloquium of PtolemyDokument37 SeitenCentiloquium of PtolemyNatasa Karalic Koprivica100% (9)
- CESC Performance Task Quarter 1Dokument3 SeitenCESC Performance Task Quarter 1MarinaM.CubiaNoch keine Bewertungen
- CSMP77: en Es FRDokument38 SeitenCSMP77: en Es FRGerson FelipeNoch keine Bewertungen
- Transformational and Charismatic Leadership: The Road Ahead 10th Anniversary EditionDokument32 SeitenTransformational and Charismatic Leadership: The Road Ahead 10th Anniversary Editionfisaac333085Noch keine Bewertungen
- MikroekonomiDokument1 SeiteMikroekonomiYudhaPrakosoIINoch keine Bewertungen
- Defining The Market Research Problem & Developing An ApproachDokument77 SeitenDefining The Market Research Problem & Developing An ApproachSakshi Bhati I H21O41Noch keine Bewertungen
- Erp FinalDokument33 SeitenErp FinaltenetchatNoch keine Bewertungen
- Unit 9 TelephoningDokument14 SeitenUnit 9 TelephoningDaniela DanilovNoch keine Bewertungen
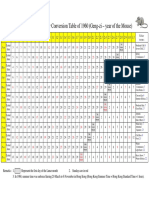
- Gregorian-Lunar Calendar Conversion Table of 1960 (Geng-Zi - Year of The Mouse)Dokument1 SeiteGregorian-Lunar Calendar Conversion Table of 1960 (Geng-Zi - Year of The Mouse)Anomali SahamNoch keine Bewertungen
- Tia Portal V16 OrderlistDokument7 SeitenTia Portal V16 OrderlistJahidul IslamNoch keine Bewertungen
- Module 8 - Facilitating Learner - Centered TeachingDokument4 SeitenModule 8 - Facilitating Learner - Centered TeachingSheila Mae Paltep100% (3)
- Shaheed Suhrawardy Medical College HospitalDokument3 SeitenShaheed Suhrawardy Medical College HospitalDr. Mohammad Nazrul IslamNoch keine Bewertungen
- Computer Forensics ReportDokument7 SeitenComputer Forensics ReportMatias IacobuzioNoch keine Bewertungen
- 2018-3-27 MIDAS Civil Presentation Curved BridgesDokument57 Seiten2018-3-27 MIDAS Civil Presentation Curved BridgesShishir Kumar NayakNoch keine Bewertungen
- Abbreviations For O&G IndustryDokument38 SeitenAbbreviations For O&G IndustryMike George MeyerNoch keine Bewertungen
- Useful C Library FunctionDokument31 SeitenUseful C Library FunctionraviNoch keine Bewertungen