Das könnte Ihnen auch gefallen
- Consumos FusiblesDokument6 SeitenConsumos FusiblesEli Caicedo GuerraNoch keine Bewertungen
- Lab2 1-RiDokument16 SeitenLab2 1-RiEli Caicedo GuerraNoch keine Bewertungen
- Deber MateoDokument1 SeiteDeber MateoEli Caicedo GuerraNoch keine Bewertungen
- Robotica MatlabDokument6 SeitenRobotica MatlabEli Caicedo GuerraNoch keine Bewertungen
- Transform A DazDokument2 SeitenTransform A DazMagy ComoNoch keine Bewertungen
- Informe Control DigitalDokument6 SeitenInforme Control DigitalEli Caicedo GuerraNoch keine Bewertungen
- Deber MateoDokument1 SeiteDeber MateoEli Caicedo GuerraNoch keine Bewertungen
- Info DijitalesDokument3 SeitenInfo DijitalesEli Caicedo GuerraNoch keine Bewertungen
- Info DijitalesDokument10 SeitenInfo DijitalesEli Caicedo GuerraNoch keine Bewertungen
- Furmulas InstruDokument4 SeitenFurmulas InstruEli Caicedo GuerraNoch keine Bewertungen
- Consideraciones Tomadas Paramar El CircuitoDokument4 SeitenConsideraciones Tomadas Paramar El CircuitoEli Caicedo GuerraNoch keine Bewertungen
- Manual MatlabDokument31 SeitenManual MatlabLuispama100% (1)
- Albañilería E 070Dokument10 SeitenAlbañilería E 070Anonymous dUpEvQsINoch keine Bewertungen
- Práctica de Movimiento CircularDokument7 SeitenPráctica de Movimiento CircularEriann EspañóNoch keine Bewertungen
- c5-TEOREMA DE CASTIGLIANOFDokument11 Seitenc5-TEOREMA DE CASTIGLIANOFJhordan Ivan Abanto TamayoNoch keine Bewertungen
- Caida Redes VoltajeDokument15 SeitenCaida Redes VoltajeJimiziin CabreraNoch keine Bewertungen
- Movimiento CurvilinioDokument13 SeitenMovimiento CurvilinioDiego A. MartinezNoch keine Bewertungen
- Comportamiento Estructural Unidad 01 La EstructuraDokument23 SeitenComportamiento Estructural Unidad 01 La EstructuranelsonalvaroNoch keine Bewertungen
- Análisis Numérico de Un Destilador Solar Tipo CasetaDokument131 SeitenAnálisis Numérico de Un Destilador Solar Tipo CasetaAlberto LepelNoch keine Bewertungen
- Tra Ducci OnDokument17 SeitenTra Ducci OnRonny AlexisNoch keine Bewertungen
- Cálculo PoleasDokument26 SeitenCálculo PoleasAlejandro ZuñigaNoch keine Bewertungen
- TP3 Física ModernaDokument2 SeitenTP3 Física ModernajuanaNoch keine Bewertungen
- Exs2001 1uniDokument2 SeitenExs2001 1uniHugo Leonidas Acosta GrandezNoch keine Bewertungen
- Fisica para El DiseñoDokument49 SeitenFisica para El DiseñoJosé Luis MejíaNoch keine Bewertungen
- PRACTICADokument7 SeitenPRACTICAGarcia JosiasNoch keine Bewertungen
- CentrifugacionDokument40 SeitenCentrifugacionJhon Vega HuillcasNoch keine Bewertungen
- Mecanismo Polea CorreaDokument6 SeitenMecanismo Polea CorreaHender Jose Arias ZambranoNoch keine Bewertungen
- Ficha N°5Dokument4 SeitenFicha N°5MauricioGonnetNoch keine Bewertungen
- Actividad en Clases 10-1-2023Dokument6 SeitenActividad en Clases 10-1-2023Angel MusicNoch keine Bewertungen
- Practica 7 Termodinamica FiDokument6 SeitenPractica 7 Termodinamica FiJoel Ramos100% (2)
- La Visita A Neg Ahne Poc PDFDokument7 SeitenLa Visita A Neg Ahne Poc PDFJorge Robles CalderónNoch keine Bewertungen
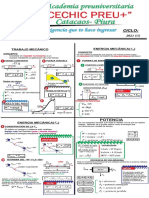
- "Cechic Preu+": Catacaos-PiuraDokument1 Seite"Cechic Preu+": Catacaos-PiuraJONNY GIANPIERE ALARCON IPANAQUENoch keine Bewertungen
- Elementos de BordeDokument28 SeitenElementos de BordeJuan Calero100% (4)
- Monografía - Física Moderna PDFDokument36 SeitenMonografía - Física Moderna PDFLuis Enrique Mestanza Díaz0% (1)
- Seminario Cinematica n2Dokument7 SeitenSeminario Cinematica n2Aldo Garcilazo LopezNoch keine Bewertungen
- Cap. 12.1 Deflexion de Vigas y EjesDokument28 SeitenCap. 12.1 Deflexion de Vigas y EjesMax RodriguezNoch keine Bewertungen
- Tarea de Fisica Caida Libre Listo 10000Dokument8 SeitenTarea de Fisica Caida Libre Listo 10000Grupo 4CNoch keine Bewertungen
- Ejercicios Propuestos Sobre Atomo de Bohr y Series Espectrales Del HidrógenoDokument2 SeitenEjercicios Propuestos Sobre Atomo de Bohr y Series Espectrales Del HidrógenoJannia DevozNoch keine Bewertungen
- Anexo Memoria de GasDokument4 SeitenAnexo Memoria de GasGERARDONoch keine Bewertungen
- Elevador Hidráulico.Dokument20 SeitenElevador Hidráulico.E95ARHNoch keine Bewertungen
- Experimento para Calcular La Constante de Restitucion de Un ResorteDokument4 SeitenExperimento para Calcular La Constante de Restitucion de Un ResorteFherlock HolmesNoch keine Bewertungen
- Las Ondas ElectromagnéticasDokument3 SeitenLas Ondas ElectromagnéticasNatalia SanchezNoch keine Bewertungen