Das könnte Ihnen auch gefallen
- Request For Transfer of RecordsDokument1 SeiteRequest For Transfer of Recordsmclp2000Noch keine Bewertungen
- PCM EncodingDokument3 SeitenPCM Encodingmclp2000Noch keine Bewertungen
- A1 11 PDFDokument8 SeitenA1 11 PDFRobertus AjiNoch keine Bewertungen
- 02 Power Measurements PDFDokument8 Seiten02 Power Measurements PDFmclp2000Noch keine Bewertungen
- FSK - Frequency Shift FSK - Frequency Shift FSK - Frequency Shift FSK - Frequency Shift Keying Keying Keying KeyingDokument10 SeitenFSK - Frequency Shift FSK - Frequency Shift FSK - Frequency Shift FSK - Frequency Shift Keying Keying Keying KeyingSylvester VincentNoch keine Bewertungen
- In Tall at IonsDokument1 SeiteIn Tall at Ionsmclp2000Noch keine Bewertungen
- Broadcast Code of 2007Dokument38 SeitenBroadcast Code of 2007Virginia Bautista100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Gay-Lussac's Law Problems and SolutionsDokument1 SeiteGay-Lussac's Law Problems and SolutionsBasic PhysicsNoch keine Bewertungen
- Maths IA IntroDokument20 SeitenMaths IA Introshakthi aravinthNoch keine Bewertungen
- 960 Physics (PPU) Semester 2 Topics-SyllabusDokument7 Seiten960 Physics (PPU) Semester 2 Topics-SyllabusJosh, LRT0% (1)
- Partial Differential Equations Formula SheetDokument3 SeitenPartial Differential Equations Formula SheetnewyorkstudyNoch keine Bewertungen
- Anti Derivative Chain RuleDokument4 SeitenAnti Derivative Chain Ruletutorciecle123Noch keine Bewertungen
- Skema Chemistry Paper 3Dokument8 SeitenSkema Chemistry Paper 3nurul atiqahNoch keine Bewertungen
- University of Engineering and Technology Peshawar, PakistanDokument54 SeitenUniversity of Engineering and Technology Peshawar, PakistanJoachim GardNoch keine Bewertungen
- Laser Beam Energy Distribution Affects Weld DimensionsDokument8 SeitenLaser Beam Energy Distribution Affects Weld Dimensionskppsiva87Noch keine Bewertungen
- Performance-Based Plastic Design and Energy-Based Evaluation of Seismic Resistant RC Moment FrameDokument7 SeitenPerformance-Based Plastic Design and Energy-Based Evaluation of Seismic Resistant RC Moment FrameARJafariNoch keine Bewertungen
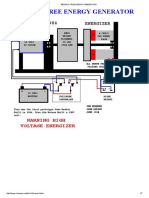
- Bedini's Free Energy Generator PDFDokument7 SeitenBedini's Free Energy Generator PDFRafly Attila Al-Fiqri71% (7)
- Blue Jackson ErrataDokument6 SeitenBlue Jackson Errataplucht1Noch keine Bewertungen
- Adjoint Rans With Filtered Shape Derivatives For Hydrodynamic OptimisationDokument11 SeitenAdjoint Rans With Filtered Shape Derivatives For Hydrodynamic Optimisationvolo87Noch keine Bewertungen
- Jar TestDokument1 SeiteJar TestEduardo Tonino Chavez GaytanNoch keine Bewertungen
- Cementing EquipDokument12 SeitenCementing Equipzbhdzp100% (1)
- The Law of OneDokument745 SeitenThe Law of OneSuprakash100% (18)
- Master1 AM CoursesDokument3 SeitenMaster1 AM CoursesParokotil MidhunNoch keine Bewertungen
- Chapter - 3.2 - Finale Internal Forced ConvectionDokument18 SeitenChapter - 3.2 - Finale Internal Forced ConvectioneirinaNoch keine Bewertungen
- Refractive Index of A Liquid (Theory) : Class 12: PhysicsDokument4 SeitenRefractive Index of A Liquid (Theory) : Class 12: PhysicsAmartya AnshumanNoch keine Bewertungen
- Thesis MainDokument144 SeitenThesis MainIvan GrkajacNoch keine Bewertungen
- Stp417-Eb 5820 PDFDokument219 SeitenStp417-Eb 5820 PDFS R Kumar KonathalaNoch keine Bewertungen
- I. Turek Et Al - Exchange Interactions, Spin Waves, and Transition Temperatures in Itinerant MagnetsDokument36 SeitenI. Turek Et Al - Exchange Interactions, Spin Waves, and Transition Temperatures in Itinerant MagnetsTellusz4532Noch keine Bewertungen
- Choice of Steel Material To Avoid Brittle Fracture For Hollow Section StructuresDokument204 SeitenChoice of Steel Material To Avoid Brittle Fracture For Hollow Section Structuresg1n2Noch keine Bewertungen
- 4363 111 Machine Design IDokument6 Seiten4363 111 Machine Design Iyogesh_b_k100% (2)
- Calculation of Electrical Induction Near Power LinesDokument22 SeitenCalculation of Electrical Induction Near Power LinesalpcruzNoch keine Bewertungen
- Meteorology and Wind Resource Geostrophic BalanceDokument10 SeitenMeteorology and Wind Resource Geostrophic BalanceSilvio NunesNoch keine Bewertungen
- Reviewer in Electricity and MagnetismDokument3 SeitenReviewer in Electricity and MagnetismWayne David C. PadullonNoch keine Bewertungen
- Force & FrictionDokument9 SeitenForce & Frictionbinu_praveen100% (1)
- Radar PlottingDokument23 SeitenRadar Plottingthugsdei100% (2)