Beruflich Dokumente
Kultur Dokumente
Doble Jaula
Hochgeladen von
David CastroCopyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Doble Jaula
Hochgeladen von
David CastroCopyright:
Verfügbare Formate
UNIVERSIDAD DE CANTABRIA
DEPARTAMENTO DE INGENIERA
ELCTRICA Y ENERGTICA
MOTORES DE DOBLE
JAULA Y DE
RANURA PROFUNDA
Miguel Angel Rodrguez Pozueta
2009, Miguel Angel Rodrguez Pozueta
Universidad de Cantabria (Espaa)
Departamento de Ingeniera Elctrica y Energtica
Est permitida la reproduccin total o parcial de este documento con la
condicin inexcusable de citar su procedencia y su carcter gratuito.
Este documento puede descargarse gratuitamente desde esta Web:
http://personales.unican.es/rodrigma/primer/publicaciones.htm
UNIVERSIDAD DE CANTABRIA. E.T.S.I. INDUSTRIALES Y TELECOMUNICACIN
DEPARTAMENTO DE INGENIERA ELCTRICA Y ENERGTICA
MOTORES DE DOBLE JAULA Y DE RANURA PROFUNDA
Miguel Angel Rodrguez Pozueta
PRESENTACIN
El sistema de arranque de un motor asncrono por introduccin de resistencias en serie
con el rotor permite obtener un elevado par en el arranque. Sin embargo, este mtodo slo
puede utilizarse con motores de rotor bobinado. Se han construido motores de jaula que, de
alguna manera, realizan un arranque similar al de los motores de rotor bobinado; es decir,
tienen una resistencia rotrica elevada en el arranque, pero el valor de este parmetro se va
reduciendo a medida que el motor aumenta su velocidad. De esta manera se consigue que
estos motores posean un mayor par de arranque.
Este texto se dedica al estudio de estos motores asncronos con caractersticas de
arranque mejoradas. Se supone que el lector ya posee unos conocimientos bsicos sobre la
constitucin y principio de funcionamiento de las mquinas asncronas, as como de su
circuito equivalente y de su curva de par.
DESCRIPCIN Y PRINCIPIO DE FUNCIONAMIENTO DE ESTOS MOTORES
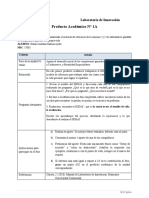
Motores de doble jaula
Los motores de doble jaula poseen dos jaulas concntricas (Fig. 1a), construidas de tal
manera que la jaula externa (situada ms cerca de la boca de las ranuras) presenta una
pequea inductancia de dispersin y una elevada resistencia, mientras que la interna (situada
en el fondo de las ranuras del rotor) presenta baja resistencia y alta inductancia.
Para lograr esto la jaula externa tiene barras de menos seccin que la jaula interna. En
algunos casos, la jaula externa adems se fabrica con un material de mayor resistividad (latn
o bronce) que la interna (cobre). As se consigue que la jaula externa tenga mayor resistencia
que la interna. Por otra parte, cada ranura se estrecha en el espacio que hay entre ambas jaulas
(Fig. 1a), dejando slo una rendija delgada. De esta forma se aumenta el flujo de dispersin de
la jaula interna, ya que as las lneas de campo de este flujo tienen un recorrido con menor
reluctancia magntica (vase la Fig. 3). La jaula externa, al encontrarse ms cerca del
entrehierro, tiene un flujo de dispersin menor, pues sus lneas de campo tienen un recorrido
de mayor reluctancia por incluir en mayor proporcin trayectos en el aire (fuera del hierro).
As se consigue que la jaula interna presente mayor inductancia de dispersin que la jaula
externa.
(a)
(b)
(c)
(d)
Fig. 1: Ranuras rotricas de los motores de doble jaula (a) y de ranura profunda (b, c, y d)
M.A.R. Pozueta
-1-
UNIVERSIDAD DE CANTABRIA. E.T.S.I. INDUSTRIALES Y TELECOMUNICACIN
DEPARTAMENTO DE INGENIERA ELCTRICA Y ENERGTICA
Dado que se verifica que la frecuencia de las corrientes del rotor (f2) est relacionada con
la frecuencia de las corrientes del estator (f1) y el deslizamiento (s) mediante esta frmula:
f 2 = s f1
(1)
en el momento del arranque (s = 1), la frecuencia f2 de las corrientes del rotor es igual a la
de la red f1 y la reactancia de las jaulas alcanza su valor mximo. Por ello, al arrancar la
jaula externa, a pesar de tener mayor resistencia, presenta menos impedancia que la jaula
interna -de alta reactancia y, en consecuencia, de mayor impedancia- y las corrientes
rotricas circulan preferentemente por ella. Se consigue as un elevado par de arranque, pues
el rotor presenta entonces una resistencia alta.
A medida que el motor adquiere velocidad, disminuye la frecuencia rotrica y vara el
reparto de corrientes entre las dos jaulas, aumentando la corriente de la jaula interna, cuya
reactancia va bajando, y disminuyendo la corriente de la jaula externa. En rgimen
normal -es decir, con deslizamientos pequeos- la frecuencia rotrica es muy pequea y las
reactancias de las jaulas son despreciables, de tal manera que la corriente circula casi
exclusivamente por la jaula interna; ya que ahora es la que presenta menor impedancia. En
efecto, a bajos deslizamientos las reactancias son extremadamente pequeas y las
impedancias consisten casi slo en resistencias. Esto significa que en estas condiciones el
reparto de corrientes entre las dos jaulas viene condicionado por el valor de sus resistencias.
La corriente circular, entonces, preferentemente por la jaula de menor resistencia, que es la
jaula interna.
Por lo tanto, en los motores de doble jaula el arranque se realiza con una resistencia
elevada en el rotor que paulatinamente va disminuyendo a medida que el motor alcanza
velocidad. El proceso de arranque presenta, pues, cierta similitud con el de los motores de
rotor bobinado. Sin embargo, en los motores de doble jaula este aumento de la resistencia en
el arranque va acompaado de una disminucin de la reactancia en el arranque, lo cual no se
produce en los motores de rotor bobinado.
Motores de ranura profunda
Los motores de ranura profunda tienen una jaula cuyos conductores tienen una forma
tal que su parte inferior (en el fondo de las ranuras) presenta pequea resistencia y alta
autoinduccin y la parte superior (hacia la boca de las ranuras) presenta alta resistencia y
baja autoinduccin (Fig. 1b, c, y d). Para ello las barras se construyen ms estrechas cerca de
la boca de la ranura que en el fondo.
El comportamiento de estos motores, por tanto, es similar al de los motores de doble
jaula: en el arranque la corriente se concentra en la parte superior de los conductores (de alta
resistencia) y en marcha normal la corriente circula preferentemente por la parte inferior,
consiguindose as un elevado par de arranque.
Por lo tanto, en los motores de doble jaula y de ranura profunda los parmetros del rotor
R2 y X2 no son constantes, sino que son funciones de la frecuencia rotrica f2. Dado que se
cumple la relacin (1), si el motor es alimentado con corrientes de frecuencia f1 constante, se
tiene que los parmetros R2 y X2 son funciones del deslizamiento s.
M.A.R. Pozueta
-2-
UNIVERSIDAD DE CANTABRIA. E.T.S.I. INDUSTRIALES Y TELECOMUNICACIN
DEPARTAMENTO DE INGENIERA ELCTRICA Y ENERGTICA
CIRCUITOS EQUIVALENTES PARA MOTORES DE DOBLE JAULA
Fig. 2: Circuito equivalente de un motor asncrono trifsico de doble jaula
En la Fig. 2 se muestra el circuito equivalente de un motor de doble jaula. Este circuito
equivalente se puede utilizar tambin para los motores de ranura profunda.
La resistencia R2c corresponde a la resistencia de los anillos de cortocircuito cuando
estos anillos son comunes a ambas jaulas y las resistencias R2e y R2i corresponden a las
barras de las jaulas interna y externa, respectivamente. En los motores en los que los anillos
de cortocircuito son diferentes para ambas jaulas, se da un valor nulo a la resistencia R2c y
la resistencia de los anillos se incorpora a R2e y R2i.
En la Fig. 3 se representa una ranura de un motor de doble jaula y las lneas del campo
magntico de dispersin correspondientes. Adems de estas lneas de dispersin, tambin
existirn las correspondientes al campo magntico principal que no se han incluido en la
Fig. 3.
Fig. 3: Dispersin en una ranura rotrica
de un motor de doble jaula
En la Fig. 3 se puede apreciar que existen unas lneas de campo magntico de dispersin
que slo rodean a una de las jaulas (lneas del tipo a y del tipo b en la Fig. 3). El campo
magntico de dispersin cuyas lneas de campo slo rodean a una jaula, en virtud del Teorema
M.A.R. Pozueta
-3-
UNIVERSIDAD DE CANTABRIA. E.T.S.I. INDUSTRIALES Y TELECOMUNICACIN
DEPARTAMENTO DE INGENIERA ELCTRICA Y ENERGTICA
de Ampre, es originado nicamente por la corriente que circula por esta jaula y slo afecta a
dicha jaula. En el circuito equivalente de la Fig. 2 los efectos de estos campos magnticos de
dispersin estn representados por las reactancias X2e y X2i. Por otra parte, en la Fig. 3 se
puede apreciar que tambin existen otras lneas de campo magntico de dispersin que son
comunes a ambas jaulas (lneas del tipo c en la Fig. 3). Este campo de dispersin ser
originado por el efecto conjunto de las corrientes de las dos jaulas y ejerce influencia sobre
ambas. Aunque este campo magntico afecta a dos de los devanados del motor, sigue
tratndose de un campo magntico de dispersin pues sus lneas de campo no atraviesan el
entrehierro y no afectan al devanado del estator. En el circuito equivalente de la Fig. 2 los
efectos de este campo magntico de dispersin comn est representado por la reactancia X2c
1
.
Se van a denominar R20 y X20 a los valores de la resistencia y la reactancia totales del
rotor (R2 y X2) en el caso particular de que el deslizamiento vale 0 (marcha en vaco).
Anlogamente, se van a denominar R2a y X2a a los valores de estos parmetros en el caso
particular de que el deslizamiento vale 1 (arranque).
Fig. 4: Circuito equivalente simplificado de un motor asncrono trifsico de doble jaula
El circuito equivalente de la Fig. 2 se suele simplificar de forma que la rama en paralelo
quede situada justo en bornes del estator 2 y que slo aparezcan 4 parmetros de resistencia y
reactancia en el rotor, ya que as estos parmetros se podrn determinar si se conocen los
valores de R20, X20, R2a y X2a.
En realidad, el campo magntico de dispersin incluye otras lneas de campo adems de las que rodean
las ranuras del rotor; pero en todas ellas se puede hacer la divisin que se menciona en el texto: las
lneas de campo de dispersin que afectan a cada una de las jaulas por separado (representadas por X2e
y X2i, respectivamente) y las que son comunes a ambas jaulas (representadas por X2c).
El desplazar la rama en paralelo a los bornes del estator introduce un error. En el libro de Kostenko [6]
se demuestra que este error se reduce -especialmente en el clculo del par- si, a la vez que se desplaza la
rama en paralelo a los bornes del estator, se modifican ligeramente los parmetros del nuevo circuito
equivalente empleando el coeficiente c1 = 1 + (X1 / X ) , cuyo valor es ligeramente superior a 1. As, los
parmetros R1, X1, RFe y X se deben multiplicar por c1 y los parmetros del rotor, R2, X2, R2c, R2e,
X2e, R2i y X2i, se deben multiplicar por c12.
M.A.R. Pozueta
-4-
UNIVERSIDAD DE CANTABRIA. E.T.S.I. INDUSTRIALES Y TELECOMUNICACIN
DEPARTAMENTO DE INGENIERA ELCTRICA Y ENERGTICA
Siempre se suele considerar nula la resistencia comn R2c y, si es preciso, su efecto se
incluye dentro de las resistencias de cada jaula, R2e y R2i. La mayora de los autores (por
ejemplo, Alger [1] y Kostenko [6]) recomiendan despreciar la reactancia X2e de la jaula
R'
externa porque su valor suele ser pequeo comparado con 2e (Fig. 4). Otros autores ([3],
s
[4]) recomiendan despreciar la reactancia comn X2c y aumentar las reactancias de cada
jaula, X2e y X2i, para incluir de un modo aproximado sus efectos (Fig. 5).
Fig. 5: Otro circuito equivalente simplificado de un motor asncrono trifsico de doble jaula
Tambin hay otros autores (como Chalmers [2]) que recomiendan despreciar en el
circuito equivalente de la Fig. 2 slo la resistencia R2c y establecer como dato adicional una
proporcin entre X2e y X2c. En efecto, es sabido que X2e toma valores entre el 5 y el 20%
de X2c. Si no se conocen datos de diseo del motor que permitan establecer una relacin
ms exacta, se puede considerar que X2e es igual al 7% de X2c.
Incluso en los motores de simple jaula existe en alguna medida el efecto pelicular, es
decir, el fenmeno de la modificacin de la distribucin de la corriente en el interior de las
barras cuando vara el deslizamiento (lo cual no sucede en los motores con el rotor bobinado).
Por esta razn, es conveniente que en todos los motores de jaula se utilice alguno de los
circuitos equivalentes de las Figs. 2, 4 y 5 en lugar del circuito equivalente de simple jaula.
No obstante, si lo que se desea es analizar el comportamiento de la mquina asncrona
con deslizamientos pequeos (para los cules los parmetros del rotor son constantes y valen
R20 y X20, respectivamente), s que se puede emplear el circuito equivalente de un motor
de simple jaula.
Impedancia total del rotor
La forma de calcular las caractersticas de un motor de doble jaula o de ranura profunda
ser el determinar para un deslizamiento s dado la impedancia equivalente Z' 2 del rotor (de
R'2
las dos jaulas en paralelo) e identificar esta impedancia con la impedancia
+ j X' 2 de
s
un motor de simple jaula. Se resuelve entonces como si el motor fuera de simple jaula
(Fig. 6) con dichos valores de R2 y X2.
M.A.R. Pozueta
-5-
UNIVERSIDAD DE CANTABRIA. E.T.S.I. INDUSTRIALES Y TELECOMUNICACIN
DEPARTAMENTO DE INGENIERA ELCTRICA Y ENERGTICA
Tngase presente que estos valores de R2 y X2 slo son vlidos para un valor dado del
deslizamiento s. Para otro valor del deslizamiento habr que volver a calcular los valores de
los parmetros R2 y X2 que le correspondan.
Fig. 6: Circuito equivalente de un motor de doble jaula con resistencia y
reactancia del rotor variables con la frecuencia rotrica f2
As, si se utiliza el circuito equivalente ms completo (Fig. 2), se obtienen estas expresiones:
R '2 =
R ' 2i R ' 2e (R ' 2i + R ' 2e ) + s 2 R '2i X' 22e + R ' 2e X'22i
+ R ' 2c
(R '2i + R '2e ) 2 + s 2 ( X'2i + X'2e ) 2
(2a)
R ' 22i X' 2e + R ' 22e X'2i +s 2 ( X' 2i X'2e ( X' 2i + X' 2e ) )
(2b)
X'2 =
(R '2i + R '2e ) 2
+ s 2 ( X' 2i + X'2e ) 2
+ X ' 2c
Lo cual da las siguientes relaciones en vaco (s = 0):
R '20 =
X'20 =
R ' 2i R ' 2 e
+ R ' 2c
(R ' 2i + R ' 2e )
R ' 22i X'2e + R ' 22e X' 2i
(R '2i + R '2e )
(3a)
(3b)
+ X ' 2c
y en el arranque (s = 1):
R ' 2a =
X ' 2a =
M.A.R. Pozueta
R ' 2i R ' 2e (R ' 2i + R '2e ) + R ' 2i X' 22e + R ' 2e X'22i
+ R ' 2c
(R '2i + R '2e ) 2 + ( X'2i +X'2e ) 2
R ' 22i X'2e + R '22e X'2i + X' 2i X'2e ( X'2i + X' 2e )
(R '2i +R '2e )
+ ( X'2i + X' 2e )
-6-
+ X ' 2c
(4a)
(4b)
UNIVERSIDAD DE CANTABRIA. E.T.S.I. INDUSTRIALES Y TELECOMUNICACIN
DEPARTAMENTO DE INGENIERA ELCTRICA Y ENERGTICA
Factor de jaula
En los tres circuitos equivalentes indicados anteriormente (Figs. 2, 4 y 5) se deduce que
este coeficiente
R '2 R '20
R '2
=
X'2
X'20 X'2
m =
(5)
denominado factor de jaula, es constante. Es decir, m es independiente del deslizamiento s
que se elija para calcular los valores R2 y de X2 en la frmula (5).
En motores de doble jaula el factor de jaula, m, suele tener valores cercanos a 1. Para un
motor de simple jaula m es infinito.
Se puede demostrar que se cumple lo siguiente:
m =
R '2a R '20
R ' 2i + R ' 2 e
=
X'20 X'2a
X ' 2i + X ' 2 e
(6)
Relaciones entre los parmetros del circuito equivalente de la Fig. 4
En el caso particular de utilizar el circuito equivalente de la Fig. 4, en el que se desprecia la reactancia de
la jaula externa, X2e , se cumplen las siguientes relaciones [1]:
m =
R '2i + R ' 2e
X '2i
(7a)
X '2 c = 1 + m 2 X '2a m 2 X '20
X ' 20 c = X ' 20 X ' 2 c =
( 1 + m ) (X'
2
(7b)
20 X ' 2a
(7c)
R ' 20
R ' 2i = R ' 20 1 +
m
X' 20c
(7d)
R ' 2e = R ' 20 + m X ' 20c
(7e)
X ' 2i = X ' 20c
R ' 20
1 +
m X ' 20c
X' 2 = X' 20 X' 2 =
X' 20c s 2
m
R '2 = R ' 2 R ' 20 = m X' 2 =
+ s
R ' 2i + R ' 2e
m
X' 20c
m
s
(7f)
(7g)
+1
m X' 20c s 2
m X' 20c
=
2
2
2
m + s
m
+1
s
(7h)
Se puede apreciar, entonces, que una vez conocidos los parmetros totales del rotor para deslizamientos
pequeos (R20 y X20) y en el arranque (R2a y X2a), las relaciones (6) y (7) permiten obtener los parmetros
del rotor (R2i, X2i, R2e y X2c) que se necesitan en el circuito equivalente representado en la Fig. 4.
M.A.R. Pozueta
-7-
UNIVERSIDAD DE CANTABRIA. E.T.S.I. INDUSTRIALES Y TELECOMUNICACIN
DEPARTAMENTO DE INGENIERA ELCTRICA Y ENERGTICA
ANLISIS DE LOS PARMETROS DE UN MOTOR DE RANURA PROFUNDA
Los motores con rotor de ranura profunda se pueden analizar como si fueran de doble
jaula por medio de alguno de los circuitos equivalentes de las Figs. 2, 4 y 5.
Alternativamente, estos motores se pueden estudiar mediante el circuito equivalente con
parmetros variables de la Fig. 6, si se conocen las relaciones que permiten expresar los
valores de R2 y de X2 en funcin del deslizamiento s o de la frecuencia rotrica f2.
De acuerdo con Kostenko [6], las expresiones que permiten obtener los parmetros R2 y X2 de un rotor
de ranura profunda son las siguientes:
R ' 2 = R ' 2aro + k r R ' 2bar 0
(8a)
X'2 = X'2aro + k x X'2bar 0
(8b)
En estas expresiones, R2aro y X2aro son los parmetros correspondientes a los anillos de cortocircuito.
Estos parmetros no varan con el deslizamiento, pues el fenmeno de desplazamiento de la corriente se
produce en las barras alojadas en ranuras.
R2bar0 y X2bar0 son los parmetros correspondientes a las barras de la jaula cuando el deslizamiento es 0.
kr y kx son los factores de efecto pelicular sobre la resistencia y la reactancia, respectivamente. Mediante
estos factores, cuyo valor es igual a la unidad para deslizamiento nulo, se tienen en cuenta los efectos del
desplazamiento de la corriente sobre la resistencia y la reactancia de las barras de la jaula.
Se demuestra que:
kr =
kx =
sh 2 + sen 2
ch 2 cos 2
3 sh 2 sen 2
2 ch 2 cos 2
(9a)
(9b)
Aunque el parmetro es adimensional se le suele denominar altura equivalente. depende de la
geometra y de los materiales de la barra. En la mayor parte de los casos se puede utilizar esta expresin que
corresponde a jaulas de barras rectangulares:
= h
0 f 2
= h
0 f1
(10a)
donde:
-h
- 0
- f2
- f1
-s
-
es la altura de la barra.
-7
es la permeabilidad magntica del vaco (cuyo valor en el S.I. es 4 10 ).
es la frecuencia de las corrientes del rotor (ver la expresin (1)).
es la frecuencia de las corrientes del estator.
es el deslizamiento del motor.
es la resistividad elctrica del material de las barras.
En la expresin (10a) se deben utilizar las unidades de medida del S.I.
Si el motor se alimenta con una tensin de frecuencia 50 Hz (f1 = 50 Hz), la altura de las barras, h, se
2
mide en centmetros y la resistividad se mide en mm /m, se obtiene esta otra expresin, ms prctica:
M.A.R. Pozueta
-8-
UNIVERSIDAD DE CANTABRIA. E.T.S.I. INDUSTRIALES Y TELECOMUNICACIN
DEPARTAMENTO DE INGENIERA ELCTRICA Y ENERGTICA
Fig. 7: Variacin de los parmetros de efecto pelicular con la altura equivalente .
0,14 h
(10b)
Si en las expresiones (10) la altura h de las barras no es conocida, la norma UNE-EN 60034-28 (que se
corresponde con la norma IEC 60034-28) sugiere esta estimacin:
2p
h = 0,21
H
100
(11)
donde:
-H
-p
es la altura del eje del motor (se expresa en las mismas unidades que se desea obtener h).
es el nmero de pares de polos del motor.
En la Fig. 7 se muestra como varan los parmetros kr y kx en funcin de .
Segn Alger [1], los valores de kr y de kx, dados por la relaciones (9), se pueden aproximar as:
4 4
16 8
45
4725
Para 2 k r
8 4
32
Para 1,5 k x 1
+
8
315
31185
3
Para 2 k x
2
Para 1,5 k r 1 +
M.A.R. Pozueta
-9-
(12a)
(12b)
(12c)
(12d)
UNIVERSIDAD DE CANTABRIA. E.T.S.I. INDUSTRIALES Y TELECOMUNICACIN
DEPARTAMENTO DE INGENIERA ELCTRICA Y ENERGTICA
Las leyes que permiten determinar las variaciones de los parmetros R2 y X2 de un
motor de ranura profunda en funcin del deslizamiento s son algo complicadas y requieren
el conocer la geometra y caractersticas del rotor. Por esta razn, algunos autores sugieren el
empleo de unas relaciones aproximadas, ms fciles de utilizar.
As, segn Haque [5], se puede aceptar que los valores de R2 y X2 son constantes para
deslizamientos inferiores uno tomado como lmite, slim:
R2 R20 = constante
(si 0 s slim )
(13)
X2 X20 = constante
mientras que para deslizamientos s superiores al lmite estas magnitudes varan
aproximadamente de la siguiente manera:
R '2 R '20 K1 + K 2 s
X'2 X'20 K 3 + K 4
)
(si slim < s 1)
(14)
Se suele recomendar el tomar como deslizamiento lmite, slim, al deslizamiento sm0; esto
es, el deslizamiento para par mximo si el motor fuera de simple jaula con unos parmetros
del rotor iguales a R20 y X20:
R '20
s m0 =
R 12 + (X1 + X'20 ) 2
(15)
Las expresiones (16), deducidas de las (14), permiten calcular los parmetros adimensionales K1, K2, K3
y K4 si se conocen los valores de slim y de R20, X20, R2a y X2a:
R'
1 2a s lim
R '20
K1 =
1 s lim
K2
X '2 a
X'20
K3 =
R '2 a
1
R '20
=
1 s lim
(16b)
=
1
(16c)
1
s lim
1
s lim
(16a)
X '2 a
s lim
X'20
1 s lim
X'
X'
1 2a
1 2a
X' 20 =
X ' 20
K4 =
1
1 s lim
1
s lim
s lim
(16d)
Para los motores de diseo B segn las normas NEMA (vase el apartado dedicado al
par), los valores tpicos de estos parmetros son:
M.A.R. Pozueta
-10-
UNIVERSIDAD DE CANTABRIA. E.T.S.I. INDUSTRIALES Y TELECOMUNICACIN
DEPARTAMENTO DE INGENIERA ELCTRICA Y ENERGTICA
K1 = K2 = 0,5
K3 = 0,4
K4 = 0,6
Obsrvese como mediante estas ecuaciones se comprueba que en un motor de ranura
profunda se consigue que la resistencia equivalente del rotor R2 sea mayor durante el
arranque, logrando as mejorar el par durante el arranque con respecto al de un motor de
simple jaula.
EL PAR EN LOS MOTORES DE DOBLE JAULA Y DE RANURA PROFUNDA
La curva del par de un motor de doble jaula (Mt) se puede obtener como suma de las
correspondientes a cada una de sus jaulas (Mi y Me) (Fig. 8). Los motores de ranura
profunda tienen curvas de par similares a las de los motores de dos jaulas.
En la Fig. 8 se han sealado los siguientes puntos notables en la curva del par de un
motor de doble jaula:
El par de arranque (starting torque), Ma.
El par mximo (pull-out torque, breakdown torque), Mmx.
El par asignado o de plena carga (full load torque), MN.
El par de recuperacin (pull-up torque), Mb.
Los tres primeros puntos notables son similares a los correspondientes del motor de
simple jaula. El par de recuperacin Mb es el par mnimo en la zona de la curva
comprendida entre el arranque y el par mximo.
Fig. 8: Curva de par de un motor de doble jaula
(n = velocidad de giro del rotor; n1 = velocidad de sincronismo)
La forma de esta curva est influida por el factor de jaula, m; especialmente en la zona
de deslizamientos superiores al de par mximo. As en la Fig. 9 se han mostrado las curvas
M.A.R. Pozueta
-11-
UNIVERSIDAD DE CANTABRIA. E.T.S.I. INDUSTRIALES Y TELECOMUNICACIN
DEPARTAMENTO DE INGENIERA ELCTRICA Y ENERGTICA
de par, obtenidas mediante el circuito equivalente de la Fig. 4, correspondientes a varios
motores con iguales parmetros del estator e iguales valores de R20, X20 y de X2c, pero
con diferentes valores de m.
Fig. 9: Efecto del factor de jaula m sobre la curva de par
Como ya se ha indicado anteriormente, el valor del par M de un motor trifsico de doble
jaula o de ranura profunda se puede calcular con la misma frmula que en un motor de
simple jaula:
R '2
V12
s
M =
2
2
R '2
n1
2
R
+
+
X
cc
60
1
s
(n1 = velocidad de sincronismo expresada en r.p.m.; Xcc = X1 + X2)
3
(17)
siempre que se tenga en cuenta que ahora en esta expresin los parmetros del rotor no son
constantes, sino que toman diferentes valores para cada deslizamiento s.
Los parmetros del rotor (R2 y X2) apenas varan para deslizamientos inferiores al del
par mximo, tanto en los motores de doble jaula como en los de ranura profunda. Para estos
deslizamientos, de una forma aproximada, se puede aceptar que estos parmetros valen R20
y X20, respectivamente. Esto significa que en estos motores, en general no se comete un
error apreciable si el par mximo, Mmx se calcula utilizando la frmula correspondiente
obtenida para los motores de simple jaula, siempre que en ella se introduzcan los valores que
tienen los parmetros del rotor cuando los deslizamientos son pequeos (R20 y X20):
M mx M mx 0 =
M.A.R. Pozueta
3
2
n1 2 R1 +
60
-12-
V12
R12 + (X1 + X'20 ) 2
(18)
UNIVERSIDAD DE CANTABRIA. E.T.S.I. INDUSTRIALES Y TELECOMUNICACIN
DEPARTAMENTO DE INGENIERA ELCTRICA Y ENERGTICA
Fig. 10: Curvas
par-velocidad
para los diseos
NEMA A, B, C y
D e IEC N y H
CLASE DE MOTOR
X1
X2
A
B
C
D
Rotor bobinado
0,5
0,4
0,3
0,5
0,5
0,5
0,6
0,7
0,5
0,5
Distribucin emprica de reactancias. Valores en fracciones respecto al total (X1+X2)
La National Electrical Manufacturers Association (NEMA), que es una asociacin de
fabricantes norteamericanos de mquinas elctricas, y el Comit Electrotcnico Internacional
(CEI o IEC), han clasificado los motores asncronos segn el diseo de su rotor (ver [11] y
[12]). A estos diseos corresponden las curvas de par representadas en la Fig. 10.
Los diseos NEMA ms importantes son:
Motores de clase A: Son motores de simple jaula, en los que apenas se da el efecto
pelicular, con barras de gran seccin y, consecuentemente, de baja resistencia.
Tienen pequeos deslizamientos de plena carga y de par mximo, gran par
mximo y menor par de arranque que otros motores.
Motores de clase B: Son motores de ranura profunda. Aunque su par de arranque
es casi igual al de los motores de clase A (es ligeramente inferior), su corriente de
arranque es menor. El rendimiento y el factor de potencia a plena carga son
ligeramente inferiores a los de clase A. Este es el tipo de motor ms frecuente y es
equivalente al diseo N de la IEC.
Motores de clase C: Son motores de doble jaula o de ranura profunda. Tienen
mayor par de arranque que los motores A y B y presentan menor par mximo y
mayores deslizamientos de plena carga y de par mximo que los motores A y B.
M.A.R. Pozueta
-13-
UNIVERSIDAD DE CANTABRIA. E.T.S.I. INDUSTRIALES Y TELECOMUNICACIN
DEPARTAMENTO DE INGENIERA ELCTRICA Y ENERGTICA
Esto hace que su rendimiento a plena carga sea algo inferior. Este diseo es
equivalente al H de la IEC.
Motores de clase D: Son motores de simple jaula en los que las barras del rotor son
de pequea seccin y estn construidas con un metal de alta resistividad. Esto hace
que su resistencia sea elevada, lo que origina que el deslizamiento de par mximo
sea muy elevado, as como el correspondiente a la plena carga. El par de arranque
es alto, pero el rendimiento a plena carga es bajo. Este tipo de motores se utiliza en
accionamientos con control sin variacin de la frecuencia o para accionamiento de
cargas con fuertes y frecuentes aceleraciones (gras, prensas, excavadoras,).
EFECTOS DE LA SATURACIN
Hasta ahora se ha supuesto que los parmetros de los circuitos equivalentes (Figs. 2, 4, 5
y 6) no estn afectados por el fenmeno de la saturacin magntica. Sin embargo, este
fenmeno disminuye el valor de los parmetros de reactancia y, adems, lo hace en distinta
medida segn el parmetro de que se trate.
La reactancia magnetizante X depende del valor mximo del campo magntico
principal de la mquina y este de la corriente I0 (vase el circuito equivalente de la Fig. 2).
Si la tensin, V1, y frecuencia, f1, de la red de alimentacin del motor se mantienen
invariables, el valor de X prcticamente permanece constante para deslizamientos
inferiores al de plena carga. Esta reactancia ser, entonces, la correspondiente al nivel de
saturacin de diseo del motor; es decir, al inicio de la zona de saturacin de la curva de
magnetizacin del motor. Para deslizamientos superiores la corriente del estator empieza a
aumentar, lo que provoca una mayor cada de tensin en los parmetros del primario, R1 y
X1, y una disminucin de la corriente de vaco I0 (vase la Fig. 2). Esto da lugar a una
disminucin del campo magntico principal que en el arranque (con deslizamiento, s, igual
a 1) puede tener un valor mximo del orden del 55 al 65% del correspondiente a plena carga.
En consecuencia, la reactancia magnetizante X aumenta a medida que aumenta la carga o el
deslizamiento s. De todos modos, estas variaciones de X no influyen de forma apreciable
en el par M de la mquina.
Las reactancias de dispersin -que son el parmetro X1 y los parmetros X2, X2c, X2i
y X2e, segn el circuito equivalente utilizado- dependen de la amplitud de los campos
magnticos de dispersin respectivos y, por lo tanto, de las corrientes que las atraviesan.
Para pequeos deslizamientos la corriente no aumenta tanto como para que se manifiesten
los efectos de la saturacin y estas reactancias permanecen constantes. Pero para
deslizamientos mayores las intensidades primaria y secundaria toman valores altos y, por lo
tanto, generan campos magnticos de dispersin elevados en los que se la saturacin
magntica produce efectos apreciables. Se va a denominar Isat al valor de la corriente a partir
de la cual la saturacin magntica empieza a modificar el valor de una determinada
reactancia de dispersin.
El valor de Isat depende del diseo del motor. Para ranuras semicerradas suele tomar
valores comprendidos entre 2 y 3 veces la corriente asignada. Para ranuras abiertas la
saturacin es menor y se da para corrientes mayores. Sin embargo, con ranuras cerradas Isat
puede tomar valores prximos a la corriente asignada.
M.A.R. Pozueta
-14-
UNIVERSIDAD DE CANTABRIA. E.T.S.I. INDUSTRIALES Y TELECOMUNICACIN
DEPARTAMENTO DE INGENIERA ELCTRICA Y ENERGTICA
Normalmente, se considera en los circuitos equivalentes de las Figs. 2 y 4 que la
saturacin afecta sobre todo a los parmetros X1 y X2c, mientras que los parmetros X2i y
X2e se les puede considerar constantes. En el circuito equivalente de la Fig. 6, la saturacin
afecta a los parmetros X1 y X2. Esto influye sobre el par mximo del motor, que ser algo
mayor debido a que cuando el par es mximo estas reactancias ya estn afectadas por la
saturacin. En efecto, este fenmeno provoca una reduccin en el valor de Xcc
(Xcc = X1 + X2) con respecto al correspondiente sin saturacin, con el consiguiente
aumento del par mximo (vase la ecuacin (18)).
La forma en que varan X1, X2 y X2c con la saturacin ha sido objeto de varios estudios
(vanse las referencias bibliogrficas [2] y [7]). En general, se considera que cada una de las
reactancias X1 y X2c es igual, a su vez, a la suma de dos componentes. Una de estas
componentes no se satura y, en consecuencia, es invariable con la corriente. La otra
componente es saturable y vara con la corriente siempre que esta sea superior a Isat, ya que
por debajo de esta corriente la saturacin es inapreciable. La ley que muestra la variacin de
esta segunda componente con la saturacin es funcin de la inversa de la corriente que la
recorre.
Fig. 11: Variacin del factor de saturacin, ksat, con la corriente segn Rogers
Por lo tanto, estas reactancias (X1 y X2c) varan con la saturacin segn una ley as:
X = A + B k sat
(19)
El parmetro A no vara con la corriente y representa a la componente no saturable de la reactancia X,
mientras que el producto (B ksat) representa a la componente saturable. B es una constante y ksat es el factor de
saturacin, que es inversamente proporcional a la corriente. Este parmetro tiene valor unidad cuando no hay
saturacin (si la corriente es inferior a Isat) y valor inferior a 1 si se manifiesta la saturacin (para corrientes
superiores a Isat).
M.A.R. Pozueta
-15-
UNIVERSIDAD DE CANTABRIA. E.T.S.I. INDUSTRIALES Y TELECOMUNICACIN
DEPARTAMENTO DE INGENIERA ELCTRICA Y ENERGTICA
As, por ejemplo, en las ecuaciones (20) y en la Fig. 11 se muestra la ley de variacin del factor de
saturacin, ksat, con la corriente propuesta por Rogers [7].
Si I Isat
Si I > I sat
k sat = 1
k sat =
2
1
+ sen (2 )
I
donde: = arc sen sat
I
(20a)
(20b)
(20c)
BIBLIOGRAFA
[1]
Alger, P. Induction machines. Their behavior and uses. Gordon and Breach Science
Publishers Ltd. New York. 1970.
[2]
Chalmers, B. J.; Mulki, A. S. Design synthesis of double-cage induction motors. Proc.
IEE, vol. 117, n 7, pp. 1257-1263. Jul. 1970.
[3]
Cortes Cherta, M. Curso moderno de mquinas elctricas rotativas. Tomo III:
Mquinas de corriente alterna asncronas. Editores Tcnicos Asociados, S. A.
Barcelona. 1986.
[4]
Fraile Mora, J. Mquinas Elctricas. Mc Graw-Hill/Interamericana de Espaa,
S. A. U. Madrid. 2008.
[5]
Haque, M. H. Determination of NEMA design induction motor parameters from
manufacturer data. IEEE Trans. on Energy Conversion, vol. 23, n 4, pp. 997-1004.
Dec. 2008.
[6]
Kostenko, M. P.; Piotrovski, L. M. Mquinas elctricas. Tomo II. Editorial Mir.
Mosc. 1976.
[7]
Rogers, G. J.; Shirmohammadi, D. Induction machine modelling for electromagnetic
transient program. IEEE Trans. on Energy Conversion, vol. EC-2; n 4, pp. 622-627.
Dic. 1987.
[8]
Voldek, A. I. Mquinas elctricas. Tomo II. Editorial Pueblo y Educacin. La Habana
(Cuba). 1990.
[9]
Waters, S. S; Willoughby, R. D. Modeling induction motor for system studies. IEEE
Trans. on industry applications, vol. 1a-19, n 5, pp. 875-878. Sept/oct. 1983.
[10] Boldea, I; Nasar, S.A. The induction machine handbook. CRC Press. 2002.
[11] AENOR. 2003. UNE-EN 60034-12: Mquinas elctricas rotativas. Parte 12:
Caractersticas de arranque de los motores trifsicos de induccin de jaula con una
sola velocidad. Madrid: AENOR.
[12] NEMA. 2001. NEMA Standards Publication MG 10-2001 (R2007): Energy
Management Guide For Selection and Use of Fixed Frequency Medium AC SquirrelCage Polyphase Induction Motors. Rosslyn, Virginia. USA.
M.A.R. Pozueta
-16-
Das könnte Ihnen auch gefallen
- Instrucciones para evaluación de prueba figuras incompletasDokument3 SeitenInstrucciones para evaluación de prueba figuras incompletasYadira Delgado Galarza92% (13)
- Toolkit para Agentes de Cambio - Mov-2811 PDFDokument110 SeitenToolkit para Agentes de Cambio - Mov-2811 PDFAlejandra BedoyaNoch keine Bewertungen
- Pa 01Dokument4 SeitenPa 01EDSON JONATHAN SALINAS AYALANoch keine Bewertungen
- Expo - Orden de CompraDokument6 SeitenExpo - Orden de CompraDavid CastroNoch keine Bewertungen
- Castro David MPPDokument14 SeitenCastro David MPPDavid CastroNoch keine Bewertungen
- Contro IDokument3 SeitenContro IDavid CastroNoch keine Bewertungen
- Ante ProyectoDokument11 SeitenAnte ProyectoDavid CastroNoch keine Bewertungen
- Calculo y Distribución de Bobinados FrccionariosDokument13 SeitenCalculo y Distribución de Bobinados FrccionariosDavid CastroNoch keine Bewertungen
- R Compresores David.CDokument14 SeitenR Compresores David.CDavid CastroNoch keine Bewertungen
- INFORME1 ControlDokument2 SeitenINFORME1 ControlDavid CastroNoch keine Bewertungen
- R OtrasValvulas David.CDokument29 SeitenR OtrasValvulas David.CDavid CastroNoch keine Bewertungen
- Escuela Politecnica Nacional Informe E.GDokument19 SeitenEscuela Politecnica Nacional Informe E.GDavid CastroNoch keine Bewertungen
- 10 RazonesDokument2 Seiten10 RazonesDavid CastroNoch keine Bewertungen
- I CaraterisdelosProcesos David.CDokument16 SeitenI CaraterisdelosProcesos David.CDavid CastroNoch keine Bewertungen
- DC01 Project Charter CIDokument31 SeitenDC01 Project Charter CIMaynor_Carranz_2812Noch keine Bewertungen
- R Condensadores David.CDokument17 SeitenR Condensadores David.CDavid CastroNoch keine Bewertungen
- Compresores Usados en RefrigeraciónDokument14 SeitenCompresores Usados en RefrigeraciónDavid CastroNoch keine Bewertungen
- Evaluación Del Nivel de Adhesión A La Dentina de Dos Tipos de Adhesivos de Uso Clínico Actual.Dokument23 SeitenEvaluación Del Nivel de Adhesión A La Dentina de Dos Tipos de Adhesivos de Uso Clínico Actual.Angel FuentesNoch keine Bewertungen
- Instrumentos Del EstructuralismoDokument1 SeiteInstrumentos Del EstructuralismoNatael Josue AbadNoch keine Bewertungen
- Programacion FQ 3º ESODokument16 SeitenProgramacion FQ 3º ESOcscfyqNoch keine Bewertungen
- Retard Ad orDokument7 SeitenRetard Ad orEdwin Adiche FloresNoch keine Bewertungen
- Control Semana 7 Emprendimientos y PymesDokument3 SeitenControl Semana 7 Emprendimientos y Pymesjuan100% (1)
- Proceso de ServicioDokument41 SeitenProceso de ServicioJudith MataNoch keine Bewertungen
- Castigat Ridendo MoresDokument12 SeitenCastigat Ridendo MoresDesiluetas ViernesNoch keine Bewertungen
- Enfermedades Por Radiaciones TérmicasDokument4 SeitenEnfermedades Por Radiaciones TérmicasYesu Zea RNoch keine Bewertungen
- Tiempo GeologicoDokument50 SeitenTiempo GeologicoFabian RamirezNoch keine Bewertungen
- 3 - Situacion de La Recta y El Punto en El PlanoDokument7 Seiten3 - Situacion de La Recta y El Punto en El PlanoJuan Luis BorraNoch keine Bewertungen
- Las Vocales Del EspañolDokument5 SeitenLas Vocales Del EspañolMaría Ortega GalánNoch keine Bewertungen
- Resumen Gilberto PDFDokument17 SeitenResumen Gilberto PDFSaul VilchezNoch keine Bewertungen
- Folleto El Plan de Salvacion - DDokument24 SeitenFolleto El Plan de Salvacion - Dkittys201Noch keine Bewertungen
- Diálogo entre un sacerdote y un moribundoDokument15 SeitenDiálogo entre un sacerdote y un moribundoLibrepensador CatódicoNoch keine Bewertungen
- TDRDokument10 SeitenTDRSergio SotoNoch keine Bewertungen
- TrabajoDokument3 SeitenTrabajoTime FUNNoch keine Bewertungen
- Plan de Acción Respuesta A Resultados Primero BDokument1 SeitePlan de Acción Respuesta A Resultados Primero BwillanmarcaNoch keine Bewertungen
- Revista El Zapador NX 1Dokument118 SeitenRevista El Zapador NX 1Cristóbal CarreñoNoch keine Bewertungen
- Codigo LPS para Mediciones Sobre AutocadDokument11 SeitenCodigo LPS para Mediciones Sobre AutocadGabriel Alonso Calero OsorioNoch keine Bewertungen
- Crítica Al Fundamento de La Complicidad en El Delito Establecido en La Casación #367-LambayequeDokument9 SeitenCrítica Al Fundamento de La Complicidad en El Delito Establecido en La Casación #367-LambayequeBranko YvancovichNoch keine Bewertungen
- Fenomeno Del Niño CosteroDokument8 SeitenFenomeno Del Niño CosteroJULIO OBREGONNoch keine Bewertungen
- More Than HoneyDokument11 SeitenMore Than HoneyCarlosNoch keine Bewertungen
- TESIS MAG 0844 Miguel SerranoDokument84 SeitenTESIS MAG 0844 Miguel SerranoIgnatius Von Kaar100% (1)
- Cuentas Anuales Consolidadas Repsol 2020Dokument123 SeitenCuentas Anuales Consolidadas Repsol 2020Alberto Tell FernándezNoch keine Bewertungen
- Nuevo parque infantil 'El Valle de los 6 Sentidos' en Renedo de Esgueva, ValladolidDokument14 SeitenNuevo parque infantil 'El Valle de los 6 Sentidos' en Renedo de Esgueva, ValladolidpablocobisaNoch keine Bewertungen
- CLASE 5. - Técnicas e Instrumentos de InvestigaciónDokument19 SeitenCLASE 5. - Técnicas e Instrumentos de InvestigaciónMiguel Polo100% (2)
- Requerimientos Metabolicos Del TenisDokument4 SeitenRequerimientos Metabolicos Del TenisAangeel CruzNoch keine Bewertungen