Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5783)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- UNIT 5 Linked List, Trees and GraphsDokument47 SeitenUNIT 5 Linked List, Trees and GraphsBipul Biswas0% (1)
- AAR Shell ProgrammingDokument13 SeitenAAR Shell ProgrammingMarimuthu MuthaiyanNoch keine Bewertungen
- Algorithms & Data Structure I - Lecture 5Dokument26 SeitenAlgorithms & Data Structure I - Lecture 5Waleed HåšhįmNoch keine Bewertungen
- Sorting PDFDokument46 SeitenSorting PDFABHIJIT POKHARKARNoch keine Bewertungen
- Dynamic Programming Treatment of The Travelling Salesman ProblemDokument4 SeitenDynamic Programming Treatment of The Travelling Salesman ProblemSumukhNoch keine Bewertungen
- Sphere Packing Lattices and Groups 10.1.1.66.8958 PDFDokument112 SeitenSphere Packing Lattices and Groups 10.1.1.66.8958 PDFsilviohoffmannNoch keine Bewertungen
- Cambridge Secondary Checkpoint - Mathematics (1112) April 2018 Paper 2 Mark SchemeDokument11 SeitenCambridge Secondary Checkpoint - Mathematics (1112) April 2018 Paper 2 Mark Schemefjcjjasc71% (7)
- Modulo Art:: Computer-Based DesignDokument40 SeitenModulo Art:: Computer-Based DesignJung Rae Sun100% (1)
- REPRESENTING NUMBERS AS SUMS OF FIBONACCI NUMBERSDokument2 SeitenREPRESENTING NUMBERS AS SUMS OF FIBONACCI NUMBERSCharlie PinedoNoch keine Bewertungen
- Design and Analysis of Algorithms: Session-6 Merge SortDokument45 SeitenDesign and Analysis of Algorithms: Session-6 Merge Sorthyrax123Noch keine Bewertungen
- Linear Non Linear Data StructureDokument1 SeiteLinear Non Linear Data StructuretigersayoojNoch keine Bewertungen
- 1.2 - Characteristics of Polynomial FunctionsDokument5 Seiten1.2 - Characteristics of Polynomial FunctionsPavni ChandaniNoch keine Bewertungen
- Ada AssignmentDokument24 SeitenAda Assignmenttatya topeNoch keine Bewertungen
- 12 ProbDokument2 Seiten12 ProbachandraNoch keine Bewertungen
- AAAPractical Social Network Analysis With Python (PDFDrive)Dokument494 SeitenAAAPractical Social Network Analysis With Python (PDFDrive)Daniel JohanssonNoch keine Bewertungen
- Java Notes: 15.1 Learning OutcomesDokument9 SeitenJava Notes: 15.1 Learning OutcomesKule AnthonyNoch keine Bewertungen
- CSC 3110 - Study GuideDokument2 SeitenCSC 3110 - Study Guideanon_29869256Noch keine Bewertungen
- Technical Note 21Dokument2 SeitenTechnical Note 21aamna_shaikh01Noch keine Bewertungen
- Discrete MathematicsDokument21 SeitenDiscrete MathematicsMAHENDRANoch keine Bewertungen
- Combinatorics: The Fine Art of Counting: Week 8 Lecture Notes - Graph TheoryDokument16 SeitenCombinatorics: The Fine Art of Counting: Week 8 Lecture Notes - Graph TheoryyashbhardwajNoch keine Bewertungen
- IIT Bhubaneswar PDS Lab AssignmentDokument2 SeitenIIT Bhubaneswar PDS Lab AssignmentTapas Ranjan NayakNoch keine Bewertungen
- Top 50 Questions of Basic C Programming Asked in InterviewsDokument2 SeitenTop 50 Questions of Basic C Programming Asked in InterviewsChaitanya Kumar JinkaNoch keine Bewertungen
- DPP 3 Maths PDFDokument2 SeitenDPP 3 Maths PDFswetank tripathiNoch keine Bewertungen
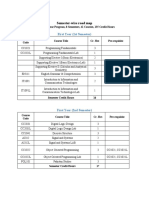
- Semester-Wise Road Map: First Year (1st Semester)Dokument4 SeitenSemester-Wise Road Map: First Year (1st Semester)Hashim AliNoch keine Bewertungen
- Implement Searching, Sorting and Graph AlgorithmsDokument19 SeitenImplement Searching, Sorting and Graph AlgorithmsAnsh BhardwajNoch keine Bewertungen
- Backtracking PDFDokument301 SeitenBacktracking PDFAnfal Ali SyedNoch keine Bewertungen
- Trees Data Structures ExplainedDokument85 SeitenTrees Data Structures ExplainedanandNoch keine Bewertungen
- Analisis Dan Perbandingan Dua Algoritma SearchingDokument5 SeitenAnalisis Dan Perbandingan Dua Algoritma SearchingWirawan IstionoNoch keine Bewertungen
- Ex 5Dokument4 SeitenEx 5thelma olipasNoch keine Bewertungen
- Numerial Methods PDFDokument4 SeitenNumerial Methods PDFAli sanaNoch keine Bewertungen