Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Trinitis Parallel ArquitecturesDokument128 SeitenTrinitis Parallel Arquitecturesrgx112Noch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Brochure Precellys Evolution A4 WebDokument2 SeitenBrochure Precellys Evolution A4 Webrgx112Noch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- TM Mic 002 PDFDokument56 SeitenTM Mic 002 PDFrgx112Noch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- BLAST Command Line Applications User Manual: Christiam CamachoDokument23 SeitenBLAST Command Line Applications User Manual: Christiam CamachoBishoy HannaNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Quidway S2300 Series Ethernet Switches Quick Start (V100R002C02 - 01) PDFDokument66 SeitenQuidway S2300 Series Ethernet Switches Quick Start (V100R002C02 - 01) PDFrgx112Noch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- ROS Summer Course Day2Dokument2 SeitenROS Summer Course Day2rgx112Noch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- IPCV08 Wang Et AlDokument7 SeitenIPCV08 Wang Et Alrgx112Noch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Simulink4Orocos: User ManualDokument9 SeitenSimulink4Orocos: User Manualrgx112Noch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- SNC RZ50 ViscamanualDokument19 SeitenSNC RZ50 Viscamanualrgx112Noch keine Bewertungen
- IPCV08 Wang Et AlDokument7 SeitenIPCV08 Wang Et Alrgx112Noch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Infrared Spectroscopy Differences Between Biodiesel Prepared From Rapeseed and The Edible Rapaseed OilDokument2 SeitenInfrared Spectroscopy Differences Between Biodiesel Prepared From Rapeseed and The Edible Rapaseed Oilrgx1120% (1)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Real Time Detection of Lane Markers in Urban Streets: Mohamed AlyDokument6 SeitenReal Time Detection of Lane Markers in Urban Streets: Mohamed AlyMichele AdduciNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- PFC Dynamic Neural Networks For MBS in Mechanical Systems PDFDokument62 SeitenPFC Dynamic Neural Networks For MBS in Mechanical Systems PDFrgx112Noch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- DCServer AntxDokument11 SeitenDCServer Antxrgx112Noch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- JMACXDokument180 SeitenJMACXrgx112Noch keine Bewertungen
- BLAST Command Line Applications User Manual: Christiam CamachoDokument23 SeitenBLAST Command Line Applications User Manual: Christiam CamachoBishoy HannaNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Polymer-Plastics Technology and EngineeringDokument6 SeitenPolymer-Plastics Technology and Engineeringsamuelben87Noch keine Bewertungen
- NuPolar Quality Testing and ComparisonsDokument12 SeitenNuPolar Quality Testing and Comparisonsou82muchNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
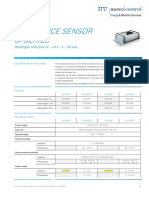
- DB Irradiance Sensor Si-Series en 20171016Dokument3 SeitenDB Irradiance Sensor Si-Series en 20171016Solar ProjectsNoch keine Bewertungen
- Buck Boost IN7900Dokument12 SeitenBuck Boost IN7900Adam StroufNoch keine Bewertungen
- Update DES Day Pit 9 Per Jam 08Dokument1 SeiteUpdate DES Day Pit 9 Per Jam 08Iccang DewiNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- LI 6500WX: Making Life Easier and SaferDokument17 SeitenLI 6500WX: Making Life Easier and SaferkellyburtonNoch keine Bewertungen
- 2206 SUBMISSION ManuscriptFile - PDF - .Docx 9327 1 10 20230711Dokument13 Seiten2206 SUBMISSION ManuscriptFile - PDF - .Docx 9327 1 10 20230711Meryouma LarbNoch keine Bewertungen
- Itp582b-515-01-Ib 2Dokument12 SeitenItp582b-515-01-Ib 2Cara & Drei Amazing JourneyNoch keine Bewertungen
- CE325 - 06 Stability of Gravity Retaining WallsDokument29 SeitenCE325 - 06 Stability of Gravity Retaining WallsRobert PrinceNoch keine Bewertungen
- Diagnostic Trouble Codes For Sinotruk HOWO Engines PDFDokument4 SeitenDiagnostic Trouble Codes For Sinotruk HOWO Engines PDFhektor AtkinsonNoch keine Bewertungen
- Chemistry Pupil Book 10 - 12Dokument260 SeitenChemistry Pupil Book 10 - 12Mawolo WuolewuNoch keine Bewertungen
- Engineeringinterviewquestions Com RCC Structures Design Multiple Choice QuestionDokument87 SeitenEngineeringinterviewquestions Com RCC Structures Design Multiple Choice QuestionRajeev BansalNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Sen2022 Software Engineering Analysis and DesignDokument84 SeitenSen2022 Software Engineering Analysis and DesignElif KaraatlıNoch keine Bewertungen
- Partial Derivative MCQs AssignementDokument14 SeitenPartial Derivative MCQs AssignementMian ArhamNoch keine Bewertungen
- Mach4 G and M Code Reference ManualDokument81 SeitenMach4 G and M Code Reference ManualMegi Setiawan SNoch keine Bewertungen
- EE223 - Signals & Systems Assignment #3 (CLO#3)Dokument3 SeitenEE223 - Signals & Systems Assignment #3 (CLO#3)haider aliNoch keine Bewertungen
- Magnetic Resonant Coupling Based Wireless PowerDokument7 SeitenMagnetic Resonant Coupling Based Wireless PowerHartantoNoch keine Bewertungen
- Appendix15B - RE Wall Design ChecklistDokument6 SeitenAppendix15B - RE Wall Design ChecklistRavi Chandra IvpNoch keine Bewertungen
- Structure of Atom - Class 11thDokument38 SeitenStructure of Atom - Class 11thAdil KhanNoch keine Bewertungen
- About Ramfs Rootfs InitramfsDokument7 SeitenAbout Ramfs Rootfs InitramfsNavaneethNoch keine Bewertungen
- On The Way To Zero Defect of Plastic-Encapsulated Electronic Power DevicesPart III Chip Coating Passivation and DesignDokument8 SeitenOn The Way To Zero Defect of Plastic-Encapsulated Electronic Power DevicesPart III Chip Coating Passivation and DesignJiyang WangNoch keine Bewertungen
- Cad Module 2Dokument3 SeitenCad Module 2JithumonNoch keine Bewertungen
- Elemental Analysis of Crude OilsDokument8 SeitenElemental Analysis of Crude OilsMirzan Alexandra Torres LaraNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- An Adaptive Hello Messaging Scheme For Neighbor Discovery in On-Demand MANET Routing ProtocolsDokument4 SeitenAn Adaptive Hello Messaging Scheme For Neighbor Discovery in On-Demand MANET Routing ProtocolsJayraj SinghNoch keine Bewertungen
- St. John of Buug Foundation IncDokument12 SeitenSt. John of Buug Foundation Inctammy a. romuloNoch keine Bewertungen
- RulesonEarthquake - AccelerographDokument17 SeitenRulesonEarthquake - AccelerographmjfprgcNoch keine Bewertungen
- Internetworking: 1 Coms22101 Lecture 9Dokument12 SeitenInternetworking: 1 Coms22101 Lecture 9Pradeep RajaNoch keine Bewertungen
- Person Name: NDT Management CoordinatorDokument4 SeitenPerson Name: NDT Management CoordinatorDendy PratamaNoch keine Bewertungen
- Product Position and Overview: Infoplus.21 Foundation CourseDokument22 SeitenProduct Position and Overview: Infoplus.21 Foundation Courseursimmi100% (1)
- Think This, Not That: 12 Mindshifts to Breakthrough Limiting Beliefs and Become Who You Were Born to BeVon EverandThink This, Not That: 12 Mindshifts to Breakthrough Limiting Beliefs and Become Who You Were Born to BeBewertung: 2 von 5 Sternen2/5 (1)
- Summary of Atomic Habits: An Easy and Proven Way to Build Good Habits and Break Bad Ones by James ClearVon EverandSummary of Atomic Habits: An Easy and Proven Way to Build Good Habits and Break Bad Ones by James ClearBewertung: 4.5 von 5 Sternen4.5/5 (560)