Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hyster H 60 XL SHOP MANUALDokument273 SeitenHyster H 60 XL SHOP MANUALjacksonholland833583% (6)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Lec 19Dokument25 SeitenLec 19jm.mankavil6230Noch keine Bewertungen
- Insulation Coordination ExampleDokument34 SeitenInsulation Coordination Exampletrungkien183% (6)
- PAT Drilling Rig List (PAT)Dokument24 SeitenPAT Drilling Rig List (PAT)Francisco Salvador MondlaneNoch keine Bewertungen
- H-D 2015 Touring Models Parts CatalogDokument539 SeitenH-D 2015 Touring Models Parts CatalogGiulio Belmondo100% (1)
- M 3094 (2013-06)Dokument17 SeitenM 3094 (2013-06)Hatada FelipeNoch keine Bewertungen
- Clark and Park TransformationDokument9 SeitenClark and Park Transformationjm.mankavil6230100% (1)
- Implementing TCSC Device in Kalpakam - Khammam Line For Power Flow EnhancementDokument4 SeitenImplementing TCSC Device in Kalpakam - Khammam Line For Power Flow Enhancementjm.mankavil6230Noch keine Bewertungen
- Characteristics and Firing Control of Thyristor Controlled Series Compensation InstallationsDokument5 SeitenCharacteristics and Firing Control of Thyristor Controlled Series Compensation Installationsjm.mankavil6230Noch keine Bewertungen
- Clarke TransformationsDokument46 SeitenClarke Transformationsjm.mankavil6230Noch keine Bewertungen
- Jalal I 1994Dokument7 SeitenJalal I 1994jm.mankavil6230Noch keine Bewertungen
- Improving Power System Dynamics by Series Connected FACTS Controllers TCSCDokument6 SeitenImproving Power System Dynamics by Series Connected FACTS Controllers TCSCjm.mankavil6230Noch keine Bewertungen
- Dstatcom AiDokument6 SeitenDstatcom Aijm.mankavil6230Noch keine Bewertungen
- Cymcap RTTR PDFDokument2 SeitenCymcap RTTR PDFjavad4531Noch keine Bewertungen
- Cable Trunking 2016-For ALLDokument46 SeitenCable Trunking 2016-For ALLjm.mankavil6230Noch keine Bewertungen
- S Aaa Aux LV Ac Board (Rev.0 2011)Dokument2 SeitenS Aaa Aux LV Ac Board (Rev.0 2011)jm.mankavil6230Noch keine Bewertungen
- Koko Sand I Le PhillipDokument130 SeitenKoko Sand I Le Phillipjm.mankavil6230Noch keine Bewertungen
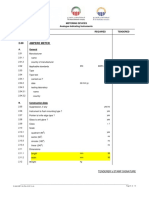
- 2.00 Ampere Meter: Metering Devices Analogue Indicating InstrumentsDokument1 Seite2.00 Ampere Meter: Metering Devices Analogue Indicating Instrumentsjm.mankavil6230Noch keine Bewertungen
- D24 Report Final 2014-1-21 27 PDFDokument1 SeiteD24 Report Final 2014-1-21 27 PDFjm.mankavil6230Noch keine Bewertungen
- Case - 2.4 Ef (Star TCC)Dokument1 SeiteCase - 2.4 Ef (Star TCC)jm.mankavil6230Noch keine Bewertungen
- Error Rateio NorunDokument725 SeitenError Rateio Norunmatheus felipeNoch keine Bewertungen
- Aalco StocklistDokument36 SeitenAalco StocklistjsfscibdNoch keine Bewertungen
- Afrimax Pricing Table Feb23 Rel BDokument1 SeiteAfrimax Pricing Table Feb23 Rel BPhadia ShavaNoch keine Bewertungen
- Electrophoretic Display Technology The Beginnings, The Improvements, and A Future in Flexible ElectronicsDokument15 SeitenElectrophoretic Display Technology The Beginnings, The Improvements, and A Future in Flexible Electronicsslysoft.20009951Noch keine Bewertungen
- Priced Boq - Beach RestaurantDokument64 SeitenPriced Boq - Beach Restaurantpsn_kylmNoch keine Bewertungen
- Checklist of E/OHS Activities For Asbestos Management: Name of Publication DateDokument20 SeitenChecklist of E/OHS Activities For Asbestos Management: Name of Publication DateidahssNoch keine Bewertungen
- Mercruiser GearcasecomponentsDokument42 SeitenMercruiser GearcasecomponentswguenonNoch keine Bewertungen
- Msamb Rules and Japan GuidelinesDokument3 SeitenMsamb Rules and Japan GuidelineslawrgeoNoch keine Bewertungen
- SIL99-2C: Service Information LetterDokument22 SeitenSIL99-2C: Service Information LettersandyNoch keine Bewertungen
- Six Stroke EngineDokument19 SeitenSix Stroke EngineSai deerajNoch keine Bewertungen
- Basic Ship Design PhasesDokument1 SeiteBasic Ship Design PhasesJhon GreigNoch keine Bewertungen
- Sewa bill-AED 559Dokument1 SeiteSewa bill-AED 559muhdazarNoch keine Bewertungen
- Be It Enacted by The Senate and House of Representative of The Philippines in Congress AssembledDokument36 SeitenBe It Enacted by The Senate and House of Representative of The Philippines in Congress AssembledGina Portuguese GawonNoch keine Bewertungen
- Packing List Steel StructureDokument56 SeitenPacking List Steel StructureNurhamsyah SusiantoNoch keine Bewertungen
- Corea 2016 Cost HandbookDokument70 SeitenCorea 2016 Cost HandbookEdutamNoch keine Bewertungen
- Issues in Timing: Digital Integrated Circuits © Prentice Hall 1995 TimingDokument14 SeitenIssues in Timing: Digital Integrated Circuits © Prentice Hall 1995 TimingAbhishek BhardwajNoch keine Bewertungen
- POCLP010101 Wood PelletsDokument1 SeitePOCLP010101 Wood PelletsPratiwi CocoNoch keine Bewertungen
- Rahul BhartiDokument3 SeitenRahul BhartirahuldearestNoch keine Bewertungen
- Anothr System Definition FacilityDokument90 SeitenAnothr System Definition FacilityllllllluisNoch keine Bewertungen
- OPA237Dokument21 SeitenOPA237philprefNoch keine Bewertungen
- IRDADokument26 SeitenIRDANikhil JainNoch keine Bewertungen
- African Music Re-Examined in The Light of New Materials From The Belgian Congo and Ruanda Urundi Akab P Merriam African Music Re-ExaminedDokument9 SeitenAfrican Music Re-Examined in The Light of New Materials From The Belgian Congo and Ruanda Urundi Akab P Merriam African Music Re-Examinedberimbau8Noch keine Bewertungen
- GPS Ter Clock Appendix E: Network Settings of GPS Using PC Windows As TELNET ClientDokument9 SeitenGPS Ter Clock Appendix E: Network Settings of GPS Using PC Windows As TELNET ClientveerabossNoch keine Bewertungen
- Odot Microstation TrainingDokument498 SeitenOdot Microstation TrainingNARAYANNoch keine Bewertungen
- BRF90Dokument10 SeitenBRF90Lukas Van VuurenNoch keine Bewertungen
- It Implementation-Issues, Opportunities, Challenges, ProblemsDokument9 SeitenIt Implementation-Issues, Opportunities, Challenges, ProblemsAnnonymous963258Noch keine Bewertungen