Das könnte Ihnen auch gefallen
- Variable Speed Pumping: A Guide to Successful ApplicationsVon EverandVariable Speed Pumping: A Guide to Successful ApplicationsBewertung: 3 von 5 Sternen3/5 (2)
- Power Electronics Design: A Practitioner's GuideVon EverandPower Electronics Design: A Practitioner's GuideBewertung: 4.5 von 5 Sternen4.5/5 (3)
- Phoibos-1.2 Manual PDFDokument58 SeitenPhoibos-1.2 Manual PDFDaniel DiaNoch keine Bewertungen
- Guide For Testing and Verification of Low Voltage InstallationsDokument144 SeitenGuide For Testing and Verification of Low Voltage Installationsnicu OlteanuNoch keine Bewertungen
- ESD TR53 01 15 FinalDokument4 SeitenESD TR53 01 15 FinalTrantan CdtNoch keine Bewertungen
- CPC 100 AppNote CVT Testing With CP TD1 2019 ENUDokument65 SeitenCPC 100 AppNote CVT Testing With CP TD1 2019 ENUThien Binh100% (3)
- Jouan CR3i - Service ManualDokument59 SeitenJouan CR3i - Service ManualEdgar Baruch Ruiz100% (3)
- AMRMeterDokument23 SeitenAMRMeterKhaled SalemNoch keine Bewertungen
- GOM 07. Guideline For Inspection of GECOL EquipmentsDokument256 SeitenGOM 07. Guideline For Inspection of GECOL EquipmentsQM_2010Noch keine Bewertungen
- Evaluating Circuit Resistance TestsDokument59 SeitenEvaluating Circuit Resistance TestsJellyn Base100% (1)
- Evaluating Insulation TestsDokument73 SeitenEvaluating Insulation TestsJellyn Base100% (1)
- EASA PART 66 Module 4 Electronic FundamentalsDokument88 SeitenEASA PART 66 Module 4 Electronic Fundamentalskiruba anandNoch keine Bewertungen
- Manual DO202GDokument88 SeitenManual DO202Ginstrumentacion.rlpNoch keine Bewertungen
- User's Manual: Model EJA310A, EJA430A and EJA440A Absolute Pressure and Gauge Pressure TransmittersDokument83 SeitenUser's Manual: Model EJA310A, EJA430A and EJA440A Absolute Pressure and Gauge Pressure TransmittersMarion TelliezNoch keine Bewertungen
- Dual Fuel Burner WGL30 1-C ZM BR2019-02 PDFDokument144 SeitenDual Fuel Burner WGL30 1-C ZM BR2019-02 PDFLVQ ENGENHARIANoch keine Bewertungen
- Wg10 SeriesDokument112 SeitenWg10 Seriesdimashanny87Noch keine Bewertungen
- Substation Operation and MaintenanceDokument20 SeitenSubstation Operation and MaintenanceREDDYGAARI ABBAYINoch keine Bewertungen
- Cambi e Nap YokogawaDokument73 SeitenCambi e Nap YokogawaKhánh LêNoch keine Bewertungen
- SR728C1 PDFDokument71 SeitenSR728C1 PDFUltisolarNoch keine Bewertungen
- Fluke 27Dokument61 SeitenFluke 27psequera29Noch keine Bewertungen
- EEX 107.02 Evaluating Insulation TestsDokument107 SeitenEEX 107.02 Evaluating Insulation TestsJellyn Base100% (1)
- TE 27,32 Maintenance and Service ManualDokument187 SeitenTE 27,32 Maintenance and Service Manualmario67% (3)
- ATS - Design Manual CaterpillarDokument84 SeitenATS - Design Manual CaterpillarSharik Khan100% (1)
- 7SR224 - Argus Complete Technical Manual (301-350)Dokument50 Seiten7SR224 - Argus Complete Technical Manual (301-350)Rosa MiñanoNoch keine Bewertungen
- Separately Excited (SX) Transistorized Motor Controllers For Neighborhood Electric Vehicle Application Installation and Operation ManualDokument39 SeitenSeparately Excited (SX) Transistorized Motor Controllers For Neighborhood Electric Vehicle Application Installation and Operation ManualMamadou djibril BaNoch keine Bewertungen
- Manual Servicio GEP GEDA GEC (Ingles)Dokument198 SeitenManual Servicio GEP GEDA GEC (Ingles)German BelenNoch keine Bewertungen
- ! Kohler Chapel Transfer Switch Tp6539Dokument40 Seiten! Kohler Chapel Transfer Switch Tp6539David HuntNoch keine Bewertungen
- ExMotor Manual RU-EN LoresDokument35 SeitenExMotor Manual RU-EN LoresMuhammad Taha KhanNoch keine Bewertungen
- Caterpillar Lift Trucks MCFE 2011 SAMPLEDokument11 SeitenCaterpillar Lift Trucks MCFE 2011 SAMPLEMoises Fernando Quijada ContrerasNoch keine Bewertungen
- IG-A05 Pressure Transmitter - EJX530ADokument52 SeitenIG-A05 Pressure Transmitter - EJX530AAdhitya ReNoch keine Bewertungen
- Effinet Service Manual1Dokument63 SeitenEffinet Service Manual1Willian Santiago CardenasNoch keine Bewertungen
- Guide For Testing and Verification of Low Voltage Installations - ANG - Ver 1.0 - 20 751 238Dokument137 SeitenGuide For Testing and Verification of Low Voltage Installations - ANG - Ver 1.0 - 20 751 238cristian111100% (4)
- Dry Type TransformersDokument170 SeitenDry Type TransformersJellyn Base100% (2)
- Measurement of Short-Circuit Impedance, Leakage Reactance - OMICRONDokument58 SeitenMeasurement of Short-Circuit Impedance, Leakage Reactance - OMICRONnnyro2402100% (1)
- Instruction Manual: 6 1/2 Digital Multimeter DL-2060 DL-2060GDokument152 SeitenInstruction Manual: 6 1/2 Digital Multimeter DL-2060 DL-2060Gรุ่งทิวา ทวีทรัพย์Noch keine Bewertungen
- User's Manual: EJX510A, EJX530A, EJX610A and EJX630A Absolute Pressure and Gauge Pressure TransmittersDokument51 SeitenUser's Manual: EJX510A, EJX530A, EJX610A and EJX630A Absolute Pressure and Gauge Pressure TransmittersInstrumentation GCS GanaNoch keine Bewertungen
- MI 3108 EurotestPV ANG Ver 1.4 20 751 987Dokument123 SeitenMI 3108 EurotestPV ANG Ver 1.4 20 751 987Benet George VadakkemulanjanalNoch keine Bewertungen
- GR 60Dokument56 SeitenGR 60Ovidio RiosNoch keine Bewertungen
- Instruction Manual: Overcurrent Relay BE1-50/51M-222Dokument42 SeitenInstruction Manual: Overcurrent Relay BE1-50/51M-222govindarulNoch keine Bewertungen
- SM4480203Dokument384 SeitenSM4480203PhilNoch keine Bewertungen
- Separately Excited (SX) Transistorized Dual Motor Traction Control and Series Pump Control Installation and Operation ManualDokument74 SeitenSeparately Excited (SX) Transistorized Dual Motor Traction Control and Series Pump Control Installation and Operation ManualBruno BayardNoch keine Bewertungen
- Simovert VCDokument114 SeitenSimovert VCFrancisco TorresNoch keine Bewertungen
- NES5100 ManualDokument185 SeitenNES5100 ManualDinh Van QuangNoch keine Bewertungen
- Dakota Ultrasonics: Operator'S Manual DFX-344Dokument104 SeitenDakota Ultrasonics: Operator'S Manual DFX-344viero widyantoNoch keine Bewertungen
- Users Guide AMRU-120Dokument48 SeitenUsers Guide AMRU-120Barce Jeff BowenNoch keine Bewertungen
- Engine Driven Miller D302K3-12 Technical ManualDokument96 SeitenEngine Driven Miller D302K3-12 Technical Manualjulio lopezNoch keine Bewertungen
- ORBISPHERE Model 3650 Atex: User Manual 10/2019, Edition 13Dokument51 SeitenORBISPHERE Model 3650 Atex: User Manual 10/2019, Edition 13Muhannad NasifNoch keine Bewertungen
- V-10130901-0202-0193 Livre Du Tra 01Dokument51 SeitenV-10130901-0202-0193 Livre Du Tra 0120501 20501Noch keine Bewertungen
- Manual sg2500mvDokument104 SeitenManual sg2500mvDung Vu DinhNoch keine Bewertungen
- Cutler-Hammer Instructions For Installation, Operation and Maintenance of Type DHP-VR Vaccum Replacement Circuit Breakers For DHP SwitchgearDokument49 SeitenCutler-Hammer Instructions For Installation, Operation and Maintenance of Type DHP-VR Vaccum Replacement Circuit Breakers For DHP Switchgearfafejaya13Noch keine Bewertungen
- Plazmax Servicio PDFDokument109 SeitenPlazmax Servicio PDFLeonel Losada Cardozo0% (1)
- User's Manual: Differential Pressure and Pressure Transmitters EJ 110, EJ 120, EJ 130, EJ 310, EJ 430, and EJ 440Dokument65 SeitenUser's Manual: Differential Pressure and Pressure Transmitters EJ 110, EJ 120, EJ 130, EJ 310, EJ 430, and EJ 440fragercitoNoch keine Bewertungen
- User's Manual: Absolute Pressure and Gauge Pressure Transmitters EJ 510, EJ 530, EJX610A and EJX630ADokument58 SeitenUser's Manual: Absolute Pressure and Gauge Pressure Transmitters EJ 510, EJ 530, EJX610A and EJX630AfragercitoNoch keine Bewertungen
- Antenna Arraying Techniques in the Deep Space NetworkVon EverandAntenna Arraying Techniques in the Deep Space NetworkNoch keine Bewertungen
- Advanced Synthesis of Gold and Zirconia Nanoparticles and their CharacterizationVon EverandAdvanced Synthesis of Gold and Zirconia Nanoparticles and their CharacterizationNoch keine Bewertungen
- Retention and Selectivity in Liquid Chromatography: Prediction, Standardisation and Phase ComparisonsVon EverandRetention and Selectivity in Liquid Chromatography: Prediction, Standardisation and Phase ComparisonsNoch keine Bewertungen
- Signal Theory Methods in Multispectral Remote SensingVon EverandSignal Theory Methods in Multispectral Remote SensingNoch keine Bewertungen
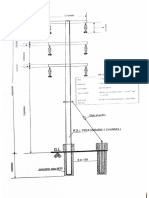
- 33 KV TowerDokument4 Seiten33 KV TowerJayabalan R KNoch keine Bewertungen
- CBIP Earth Mat DesignDokument48 SeitenCBIP Earth Mat DesignkrcdewanewNoch keine Bewertungen
- ICBDM - 2014 Submission 256Dokument7 SeitenICBDM - 2014 Submission 256krcdewanewNoch keine Bewertungen
- Ennore 230KV 110KV Spec 15.11.2022Dokument681 SeitenEnnore 230KV 110KV Spec 15.11.2022krcdewanewNoch keine Bewertungen
- 145kV-Drg23apr 270420Dokument14 Seiten145kV-Drg23apr 270420krcdewanewNoch keine Bewertungen
- Standard Specification For Transformers For Solar Park Pooling StationDokument260 SeitenStandard Specification For Transformers For Solar Park Pooling Station400KVNoch keine Bewertungen
- What 5P20Dokument22 SeitenWhat 5P20Prasad33% (3)
- Grid AIS L3 HYpact 0124 2017 - 02 ENDokument24 SeitenGrid AIS L3 HYpact 0124 2017 - 02 ENThành DanhNoch keine Bewertungen
- Al59 Panther Conductor PostDokument1 SeiteAl59 Panther Conductor PostkrcdewanewNoch keine Bewertungen
- Standard Specification For Transformers For Solar Park Pooling StationDokument260 SeitenStandard Specification For Transformers For Solar Park Pooling Station400KVNoch keine Bewertungen
- Selection of Switchyard EquipmentDokument64 SeitenSelection of Switchyard EquipmentkrcdewanewNoch keine Bewertungen
- V ) VƑ ( - Ôáè Ôwôd: M.Sc. (Yoga For Human Excellence)Dokument10 SeitenV ) VƑ ( - Ôáè Ôwôd: M.Sc. (Yoga For Human Excellence)krcdewanewNoch keine Bewertungen
- Powerline Voltage DropDokument2 SeitenPowerline Voltage Dropeng_rao19Noch keine Bewertungen
- Cost Comparision of Ais and GisDokument101 SeitenCost Comparision of Ais and Gisjainendra66Noch keine Bewertungen
- Types of Switching Surges Found in MV Motors Fed Via Cables and Switched by Vacuum Circuit BreakersDokument19 SeitenTypes of Switching Surges Found in MV Motors Fed Via Cables and Switched by Vacuum Circuit BreakersRatoka LekhemaNoch keine Bewertungen
- Internal 2013Dokument246 SeitenInternal 2013eekamalesh100% (1)
- Electrical Load EstimationDokument137 SeitenElectrical Load EstimationEren KocbeyNoch keine Bewertungen
- Transients in Hydraulic Systems - Bentley HammerDokument52 SeitenTransients in Hydraulic Systems - Bentley HammerEdwin Rafael Puma Coricaza100% (2)
- VCB Switching Furnace LoadDokument8 SeitenVCB Switching Furnace LoadkrcdewanewNoch keine Bewertungen
- Trnsys TutorialDokument79 SeitenTrnsys TutorialAndré Santos100% (4)
- Types of Power PlantDokument68 SeitenTypes of Power Plantchirag.rathiNoch keine Bewertungen
- Thermal Power PlantDokument13 SeitenThermal Power PlantThulasi RamNoch keine Bewertungen
- Bentley Adantage PDFDokument211 SeitenBentley Adantage PDFJulian100% (1)
- Switchgear and Protection - by Sunil S. Rao PDFDokument690 SeitenSwitchgear and Protection - by Sunil S. Rao PDFvj424979% (155)
- EE331 Fa08 Lesson 17 Transient Analysis HandoutDokument6 SeitenEE331 Fa08 Lesson 17 Transient Analysis HandoutShivam DwivediNoch keine Bewertungen
- ABB Selectivity Backup and MotorsDokument110 SeitenABB Selectivity Backup and MotorsAdemEfeNoch keine Bewertungen
- Elec 9e Level4 Ceps1Dokument45 SeitenElec 9e Level4 Ceps1krcdewanewNoch keine Bewertungen
- Harmonic Filter For ABB Current Harmonic LoadDokument1 SeiteHarmonic Filter For ABB Current Harmonic LoadkrcdewanewNoch keine Bewertungen
- Neutral Grounding Part3Dokument2 SeitenNeutral Grounding Part3krcdewanewNoch keine Bewertungen
- Generator Capability Curve CalculationDokument6 SeitenGenerator Capability Curve CalculationkrcdewanewNoch keine Bewertungen
- Summary Faraday's LawDokument4 SeitenSummary Faraday's LawReg TbNoch keine Bewertungen
- Allen & O'Brien - Electrical Resources - Conversion Tables - Reference Charts - Mathematical FormulaeDokument5 SeitenAllen & O'Brien - Electrical Resources - Conversion Tables - Reference Charts - Mathematical Formulaeduuk73Noch keine Bewertungen
- LV 100-2000 sp5 Voltage TransducerDokument3 SeitenLV 100-2000 sp5 Voltage TransducerGilney FreitasNoch keine Bewertungen
- Section 4 Transmission LinesDokument105 SeitenSection 4 Transmission LinesAhmedNoch keine Bewertungen
- Clca Wiring DiagramDokument1 SeiteClca Wiring DiagramRabiull HaqueNoch keine Bewertungen
- CT PolarityDokument2 SeitenCT Polarityrvim0002100% (1)
- 01-TD Series 1Dokument28 Seiten01-TD Series 1ChristianM.LeandroYauriNoch keine Bewertungen
- Description Features: Ltc4100 Smart Battery Charger ControllerDokument30 SeitenDescription Features: Ltc4100 Smart Battery Charger ControllerAlexander VargasNoch keine Bewertungen
- Alternating Current PDFDokument23 SeitenAlternating Current PDFUsha RaghavendraNoch keine Bewertungen
- Engineering Physics Laboratory: Course ObjectivesDokument3 SeitenEngineering Physics Laboratory: Course ObjectivesNaveenraj NNoch keine Bewertungen
- Emerson Hktv13 Chassis Cn-001nk SvcmnlsDokument38 SeitenEmerson Hktv13 Chassis Cn-001nk SvcmnlsAvr Electronica ChileNoch keine Bewertungen
- SABP X 003 LatestDokument41 SeitenSABP X 003 Latestjwoch100% (2)
- Digital Key Coded LockDokument11 SeitenDigital Key Coded LockEngr. Zeeshan mohsin100% (1)
- Apex 150-Feb2016 PDFDokument4 SeitenApex 150-Feb2016 PDFMona UpretiNoch keine Bewertungen
- Govt. Engineering College, Ajmer: Electrical Measurement LabDokument6 SeitenGovt. Engineering College, Ajmer: Electrical Measurement LabAnkit0% (1)
- Rotary Encoders - 0928Dokument17 SeitenRotary Encoders - 0928tecnoelectronica789Noch keine Bewertungen
- Smart Home03 PDFDokument92 SeitenSmart Home03 PDFeduardlopezNoch keine Bewertungen
- Sony KDL-32BX325 Chasis AZ2-TK PDFDokument36 SeitenSony KDL-32BX325 Chasis AZ2-TK PDFAldo TonatoNoch keine Bewertungen
- Bell 407 Troubleshooting Guide PDFDokument150 SeitenBell 407 Troubleshooting Guide PDFRamónNoch keine Bewertungen
- Double Bus and Transfer Bus SystemDokument46 SeitenDouble Bus and Transfer Bus Systemgkpalepu92% (25)
- Resume FinalDokument2 SeitenResume Finalapi-527919034Noch keine Bewertungen
- Capacitance-Based Wireless Sensor Mote For Snail Pest DetectionDokument6 SeitenCapacitance-Based Wireless Sensor Mote For Snail Pest DetectionDaniel Nguyễn100% (2)
- HB Stepper Motor EDokument22 SeitenHB Stepper Motor EEthan ColeNoch keine Bewertungen
- V3000Dokument8 SeitenV3000ranaway1Noch keine Bewertungen
- Zldo1117 PDFDokument12 SeitenZldo1117 PDFJose Barroso GuerraNoch keine Bewertungen
- TheveDokument8 SeitenTheveET201040 Mohin UddinNoch keine Bewertungen
- Design and Working of FM TransmitterDokument6 SeitenDesign and Working of FM TransmitterliyuNoch keine Bewertungen
- Leviton Catalogo GeneralDokument816 SeitenLeviton Catalogo GeneralGerardo Vargas LopezNoch keine Bewertungen
- IEC61850 Based Process Bus Protection SolutionDokument12 SeitenIEC61850 Based Process Bus Protection Solutionraghavendran raghuNoch keine Bewertungen
- EIE Unit1Dokument221 SeitenEIE Unit1karun karunaeshNoch keine Bewertungen