Das könnte Ihnen auch gefallen
- Computer Methods in Power Systems Analysis with MATLABVon EverandComputer Methods in Power Systems Analysis with MATLABNoch keine Bewertungen
- Transient Stability Analysis Using MiPowerDokument5 SeitenTransient Stability Analysis Using MiPowerBhavik Prajapati100% (1)
- EEE 1206 011 Direct Quadrate Modeling Induction Motor MatLab Simulink PDFDokument7 SeitenEEE 1206 011 Direct Quadrate Modeling Induction Motor MatLab Simulink PDFFiaz KhanNoch keine Bewertungen
- Uncertainty Analysis of Power System Components Based On Stochastic Response SurfacesDokument8 SeitenUncertainty Analysis of Power System Components Based On Stochastic Response SurfacesHassan Ali Al SsadiNoch keine Bewertungen
- Power System Stability StudiesDokument63 SeitenPower System Stability StudiesRitwik Anand0% (1)
- Factors Affecting StabilityDokument8 SeitenFactors Affecting StabilitySteve MusarurwaNoch keine Bewertungen
- Energies: Study of Excitation Characteristics of Traction Machine/Drive SystemsDokument17 SeitenEnergies: Study of Excitation Characteristics of Traction Machine/Drive SystemsBala RajuNoch keine Bewertungen
- Modelling of Power Transformer FaultsDokument7 SeitenModelling of Power Transformer FaultselizabethloayzaNoch keine Bewertungen
- IEEE PES 12plsdfa20mcmsamDokument7 SeitenIEEE PES 12plsdfa20mcmsamParameswararao BillaNoch keine Bewertungen
- Field Oriented Control of Ac Motor - ReportDokument9 SeitenField Oriented Control of Ac Motor - ReportKesri Nath TiwariNoch keine Bewertungen
- Simulation of IEEE First Benchmark Model For SSR StudiesDokument4 SeitenSimulation of IEEE First Benchmark Model For SSR StudiesPabloNalogowskiNoch keine Bewertungen
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorVon EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNoch keine Bewertungen
- Single Phase To Three Phase Converstion Using Two Parallel RectifiersDokument89 SeitenSingle Phase To Three Phase Converstion Using Two Parallel RectifiersThriveni Maddineni83% (6)
- A Research Survey of Induction Motor Operation WithDokument14 SeitenA Research Survey of Induction Motor Operation WithIoan ŢileaNoch keine Bewertungen
- Modeling of Microturbine Based Distributed Generation SystemDokument4 SeitenModeling of Microturbine Based Distributed Generation SystemsaraswatthiNoch keine Bewertungen
- MATLAB in Model-Base Design For Slip Energy Recovery of Induction MotorDokument6 SeitenMATLAB in Model-Base Design For Slip Energy Recovery of Induction Motorsanjay kumar yadavNoch keine Bewertungen
- Arindam Seminar 11Dokument6 SeitenArindam Seminar 11Arindam BhattacharjeeNoch keine Bewertungen
- Faculteit Der Elektrotechniek: Modelling and Identification of Single-And Double-Cage Induction MachinesDokument144 SeitenFaculteit Der Elektrotechniek: Modelling and Identification of Single-And Double-Cage Induction MachinesAmatek Teekay 特克纳Noch keine Bewertungen
- IJEAT Transient StabilityDokument4 SeitenIJEAT Transient StabilityVerruumm AmineNoch keine Bewertungen
- Simulation Modelling Practice and Theory: Abdallah Barakat, Slim Tnani, Gérard Champenois, Emile MouniDokument15 SeitenSimulation Modelling Practice and Theory: Abdallah Barakat, Slim Tnani, Gérard Champenois, Emile Mounigurunathan14Noch keine Bewertungen
- IEEE9 Buses System Simulation and Modeling in PSCADDokument4 SeitenIEEE9 Buses System Simulation and Modeling in PSCAD_Alastair_Noch keine Bewertungen
- A Unified Method For Modeling and Simulation of Three Phase Induction Motor DrivesDokument5 SeitenA Unified Method For Modeling and Simulation of Three Phase Induction Motor Drivesdhirajbharat20Noch keine Bewertungen
- Active Suspension System Energy Control 2009 IFAC Proceedings VolumesDokument7 SeitenActive Suspension System Energy Control 2009 IFAC Proceedings VolumesKeneni AlemayehuNoch keine Bewertungen
- Mathematical Modeling and Analysis of Different VeDokument13 SeitenMathematical Modeling and Analysis of Different Veramadhanifarahum19Noch keine Bewertungen
- A Novel Approach For Modelling and Simulation of Sensor Less BLDC MotorDokument9 SeitenA Novel Approach For Modelling and Simulation of Sensor Less BLDC MotorMefisto ElNoch keine Bewertungen
- Transient Stability Analysis of Power System Using MatlabDokument5 SeitenTransient Stability Analysis of Power System Using MatlabSaddam HussainNoch keine Bewertungen
- Comparative Evaluation Between Theoretical Models For Three-Phase Induction Motor Under Voltage UnbalanceDokument6 SeitenComparative Evaluation Between Theoretical Models For Three-Phase Induction Motor Under Voltage UnbalanceDante HollandaNoch keine Bewertungen
- BLDC: Motor FailureDokument5 SeitenBLDC: Motor FailureInternational Association of Scientific Innovations and Research (IASIR)Noch keine Bewertungen
- Study of Dynamic Behavior of Grid Connected Induction GeneratorsDokument6 SeitenStudy of Dynamic Behavior of Grid Connected Induction GeneratorsvenkyiiscNoch keine Bewertungen
- 286926639microsoft Word - Copy of IJSR4Dokument8 Seiten286926639microsoft Word - Copy of IJSR4rasim_m1146Noch keine Bewertungen
- 2 Symposium On Lift and Escalator TechnologiesDokument12 Seiten2 Symposium On Lift and Escalator TechnologiesfreddyjoertyNoch keine Bewertungen
- Applsci 08 01073 PDFDokument13 SeitenApplsci 08 01073 PDFErsi Ago100% (1)
- Calculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsDokument4 SeitenCalculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsShakeel RanaNoch keine Bewertungen
- Speed Control of DC MotorDokument10 SeitenSpeed Control of DC MotorYadira RocanoNoch keine Bewertungen
- Development of New Design To Improve The PerformanDokument12 SeitenDevelopment of New Design To Improve The PerformanAhmet Yasin BaltacıNoch keine Bewertungen
- The Feedforward Control of Mechatronic System With Backlash: Arab.M Lachouri.ADokument7 SeitenThe Feedforward Control of Mechatronic System With Backlash: Arab.M Lachouri.AZellagui EnergyNoch keine Bewertungen
- Induction Motor Control by Vector Control Method.: Miss. Bhagyashree Thool, Miss. Kalyani C. WakhareDokument6 SeitenInduction Motor Control by Vector Control Method.: Miss. Bhagyashree Thool, Miss. Kalyani C. WakhareASumeethKumarNoch keine Bewertungen
- 4334-Article Text-26786-1-10-20190807Dokument15 Seiten4334-Article Text-26786-1-10-20190807anujNoch keine Bewertungen
- DQ Modeling of SEIG in SimulinkDokument5 SeitenDQ Modeling of SEIG in SimulinkBhushan MankarNoch keine Bewertungen
- PMSM Flux Weakening ControlDokument8 SeitenPMSM Flux Weakening ControlOsama AttookNoch keine Bewertungen
- Numerical Analysis On Torque Motor Dynamics Used inDokument13 SeitenNumerical Analysis On Torque Motor Dynamics Used inSharan AnnapuraNoch keine Bewertungen
- Dynamic D-Q Axis Modeling of Three-Phase Asynchronous Machine Using MatlabDokument10 SeitenDynamic D-Q Axis Modeling of Three-Phase Asynchronous Machine Using MatlabTaoufikElKanouniNoch keine Bewertungen
- Five Phase Brushless DC Machine Direct Drive SysteDokument10 SeitenFive Phase Brushless DC Machine Direct Drive SystePraveen Nayak BhukyaNoch keine Bewertungen
- Performance Evaluation of Three Phase Induction Motor Based On No Load and Blocked Rotor Test Using MatlabDokument7 SeitenPerformance Evaluation of Three Phase Induction Motor Based On No Load and Blocked Rotor Test Using MatlabBalajiNoch keine Bewertungen
- Labview Simulation of Induction Motors: Zhaoxian Zhou and James Matthew JohnsonDokument8 SeitenLabview Simulation of Induction Motors: Zhaoxian Zhou and James Matthew JohnsonR Sathish Kumar KumarNoch keine Bewertungen
- Archive of SID: Performance Analysis of A Cost Effective 4-Switch 3-Phase Inverter Fed IM DriveDokument6 SeitenArchive of SID: Performance Analysis of A Cost Effective 4-Switch 3-Phase Inverter Fed IM DrivePranav VyasNoch keine Bewertungen
- WEDM Tension Control Simulation Based On Matlab: XI Chuan-Long, WU Jian-Min, LIU Fei YANG Jin-YeDokument4 SeitenWEDM Tension Control Simulation Based On Matlab: XI Chuan-Long, WU Jian-Min, LIU Fei YANG Jin-YeInternational Journal of Research in Engineering and ScienceNoch keine Bewertungen
- Modelling and Simulation of DC-Motor Electric Drive Control System With Variable Moment of InertiaDokument6 SeitenModelling and Simulation of DC-Motor Electric Drive Control System With Variable Moment of InertiaIDESNoch keine Bewertungen
- Unbalanced Three-Phase Distribution SystemDokument5 SeitenUnbalanced Three-Phase Distribution SystemIraj Az IraniNoch keine Bewertungen
- Sliding Mode Observer For Torque Control in Sensorless BLDC MotorDokument5 SeitenSliding Mode Observer For Torque Control in Sensorless BLDC MotorIOSRjournalNoch keine Bewertungen
- Ieee 9Dokument8 SeitenIeee 9Rupesh SushirNoch keine Bewertungen
- Electric Motor Control: DC, AC, and BLDC MotorsVon EverandElectric Motor Control: DC, AC, and BLDC MotorsBewertung: 4.5 von 5 Sternen4.5/5 (19)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlVon EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlBewertung: 5 von 5 Sternen5/5 (1)
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsVon EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNoch keine Bewertungen
- Variable Speed AC Drives with Inverter Output FiltersVon EverandVariable Speed AC Drives with Inverter Output FiltersNoch keine Bewertungen
- AMCAT Sample PaperDokument14 SeitenAMCAT Sample PaperHima Chandu KakiNoch keine Bewertungen
- HT TP: //qpa Pe R.W But .Ac .In: Power System - IiiDokument7 SeitenHT TP: //qpa Pe R.W But .Ac .In: Power System - IiiPraveen KumarNoch keine Bewertungen
- Academic Calendar (Tentative) For The Session 2016-2017Dokument2 SeitenAcademic Calendar (Tentative) For The Session 2016-2017Praveen KumarNoch keine Bewertungen
- National Institute of Technology: DurgapurDokument1 SeiteNational Institute of Technology: DurgapurPraveen KumarNoch keine Bewertungen
- Auma Valve New - FormatDokument2 SeitenAuma Valve New - FormatPraveen KumarNoch keine Bewertungen
- Electrical Fault Level CalculationDokument11 SeitenElectrical Fault Level CalculationPraveen KumarNoch keine Bewertungen
- Re: What Is An Exciter and How Does It Work? Answer Ramesh GaurDokument1 SeiteRe: What Is An Exciter and How Does It Work? Answer Ramesh GaurPraveen KumarNoch keine Bewertungen
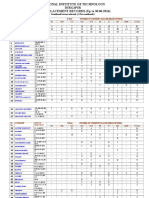
- NIT DURGAPUR PLACEMENT RECORDS 2016Dokument4 SeitenNIT DURGAPUR PLACEMENT RECORDS 2016Praveen KumarNoch keine Bewertungen
- Importance of Earthing & PracticesDokument26 SeitenImportance of Earthing & PracticesPraveen KumarNoch keine Bewertungen
- Anti Ragging ComplianceDokument1 SeiteAnti Ragging CompliancePraveen KumarNoch keine Bewertungen
- Basic Principles and Functions of ElectricalDokument18 SeitenBasic Principles and Functions of ElectricalPraveen KumarNoch keine Bewertungen
- Live Line TransmissionDokument8 SeitenLive Line TransmissionPraveen KumarNoch keine Bewertungen
- Earthing PracticesDokument16 SeitenEarthing PracticesPraveen KumarNoch keine Bewertungen
- Nuclear Power PlantDokument8 SeitenNuclear Power PlantPraveen KumarNoch keine Bewertungen
- Energy ConversionDokument10 SeitenEnergy ConversionPraveen KumarNoch keine Bewertungen
- AnnexDokument1 SeiteAnnexPraveen KumarNoch keine Bewertungen
- (WWW - Entrance-Exam - Net) - L&T Sample Paper IDokument3 Seiten(WWW - Entrance-Exam - Net) - L&T Sample Paper IManish KjNoch keine Bewertungen
- GEN CAPABILITY LIMITSDokument2 SeitenGEN CAPABILITY LIMITSPraveen KumarNoch keine Bewertungen
- Harmonics and Reactive Power Compensation in PracticeDokument21 SeitenHarmonics and Reactive Power Compensation in PracticeknarimNoch keine Bewertungen
- Schema Theory: Suggested Reading: D. E. Goldberg, Genetic Algorithm inDokument21 SeitenSchema Theory: Suggested Reading: D. E. Goldberg, Genetic Algorithm inPraveen KumarNoch keine Bewertungen
- Schema Theory: Suggested Reading: D. E. Goldberg, Genetic Algorithm inDokument21 SeitenSchema Theory: Suggested Reading: D. E. Goldberg, Genetic Algorithm inPraveen KumarNoch keine Bewertungen
- Thermal Power PlantDokument7 SeitenThermal Power PlantMamta SinghNoch keine Bewertungen
- L&T aptitude test questions guaranteed placementDokument3 SeitenL&T aptitude test questions guaranteed placementPraveen KumarNoch keine Bewertungen
- Schema Theory: Suggested Reading: D. E. Goldberg, Genetic Algorithm inDokument21 SeitenSchema Theory: Suggested Reading: D. E. Goldberg, Genetic Algorithm inPraveen KumarNoch keine Bewertungen
- Instantaneous Reactive Power SystemDokument16 SeitenInstantaneous Reactive Power SystemPraveen KumarNoch keine Bewertungen
- GSM Invoice 385363681Dokument1 SeiteGSM Invoice 385363681Praveen KumarNoch keine Bewertungen
- 2-Pole Turbine Driven Generators - Brushless ExcitationDokument2 Seiten2-Pole Turbine Driven Generators - Brushless ExcitationChandrasekar Karuppasamy100% (1)
- An Introduction To MATLAB ProgrammingDokument16 SeitenAn Introduction To MATLAB ProgrammingVisakh VijayNoch keine Bewertungen
- BLANK Letter Pad PrakrtitiDokument2 SeitenBLANK Letter Pad PrakrtitiPraveen KumarNoch keine Bewertungen
- SMC LCD User Manual - Updated PDFDokument28 SeitenSMC LCD User Manual - Updated PDFAnonymous lYNcMdflV9Noch keine Bewertungen
- Hybrid Inverter SPH Series Technical SpecificationDokument2 SeitenHybrid Inverter SPH Series Technical SpecificationJulio CesarNoch keine Bewertungen
- Material Tech Questions Solved BitsDokument22 SeitenMaterial Tech Questions Solved BitsBalakumarNoch keine Bewertungen
- K2225 MosfetDokument7 SeitenK2225 MosfetDavid Eduardo Drew PerezNoch keine Bewertungen
- Covey Stephen RDokument90 SeitenCovey Stephen RcemgallNoch keine Bewertungen
- BASF MasterSeal M 800Dokument4 SeitenBASF MasterSeal M 800Mohiuddin Muhin100% (2)
- 120FF51A Installation Guide For SAP Solutions PDFDokument234 Seiten120FF51A Installation Guide For SAP Solutions PDFNaqib Hassan100% (1)
- Items List ProcessorDokument4 SeitenItems List ProcessorDiego Escobar MoncadaNoch keine Bewertungen
- Alloy Steel Welding Precautions in Power PlantsDokument41 SeitenAlloy Steel Welding Precautions in Power PlantsVijayakumar TNoch keine Bewertungen
- IEC 61850 and ION Technology: Protocol DocumentDokument52 SeitenIEC 61850 and ION Technology: Protocol DocumentCristhian DíazNoch keine Bewertungen
- Tommy Matsumoto, AT&T Jens Co. Yoshitaka Senoo, Daiichi Co.,LtdDokument7 SeitenTommy Matsumoto, AT&T Jens Co. Yoshitaka Senoo, Daiichi Co.,Ltdpostscript100% (1)
- Project Title: Hospital Management System Description: Hospital Management System Is A Web Based Project. It Consists of Client RegistrationDokument68 SeitenProject Title: Hospital Management System Description: Hospital Management System Is A Web Based Project. It Consists of Client Registrationshahid198950% (2)
- Assignment 3 OSDokument5 SeitenAssignment 3 OSValerie ThompsonNoch keine Bewertungen
- Radio Amateur's Software GuideDokument251 SeitenRadio Amateur's Software GuideZdenko NagyNoch keine Bewertungen
- C - TurretDokument25 SeitenC - TurretNathan BukoskiNoch keine Bewertungen
- SIP Trunking Turnup GuideDokument8 SeitenSIP Trunking Turnup Guideashok7Noch keine Bewertungen
- R7320306 Thermal Engineering - IIDokument1 SeiteR7320306 Thermal Engineering - IIsivabharathamurthyNoch keine Bewertungen
- Embraer Spec E175-E2Dokument1 SeiteEmbraer Spec E175-E2Ward DepoorterNoch keine Bewertungen
- 1.1.3.4 Lab - Visualizing The Black HatsDokument3 Seiten1.1.3.4 Lab - Visualizing The Black HatsCordis CordisNoch keine Bewertungen
- Bhawesh BajajDokument2 SeitenBhawesh BajajJacob PruittNoch keine Bewertungen
- Hybrid SCADA NetworksDokument11 SeitenHybrid SCADA NetworksMarisela AlvarezNoch keine Bewertungen
- 9829d23b-6e45-4cbd-b732-f870faff49a0Dokument6 Seiten9829d23b-6e45-4cbd-b732-f870faff49a0Swamy Dhas DhasNoch keine Bewertungen
- Specification (General) Road Concreting ProjectDokument66 SeitenSpecification (General) Road Concreting ProjectMARK RANEL RAMOSNoch keine Bewertungen
- Elearn - Ecu Pins PDFDokument6 SeitenElearn - Ecu Pins PDFJavierPariNoch keine Bewertungen
- Cleaning Companies in UaeDokument5 SeitenCleaning Companies in UaeurgentincleaningseoNoch keine Bewertungen
- 32LS3400 KoreaDokument60 Seiten32LS3400 KoreaNightin VargheseNoch keine Bewertungen
- Roll Forming Handbook: George T. HalmosDokument6 SeitenRoll Forming Handbook: George T. HalmosMarco Cruz67% (3)
- International Air Service Development at Boston Logan: June 7, 2012Dokument20 SeitenInternational Air Service Development at Boston Logan: June 7, 2012chaouch.najehNoch keine Bewertungen
- Pundit Transducers - Operating Instructions - English - HighDokument8 SeitenPundit Transducers - Operating Instructions - English - HighAayush JoshiNoch keine Bewertungen
- UDI Productcatalogue 2015Dokument4 SeitenUDI Productcatalogue 2015Ryan TayNoch keine Bewertungen