Das könnte Ihnen auch gefallen
- Oracle PL/SQL Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesVon EverandOracle PL/SQL Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesNoch keine Bewertungen
- The Essence of Good Programming PracticesDokument5 SeitenThe Essence of Good Programming Practicesneeraj kumarNoch keine Bewertungen
- 9691-02 Revision Notes (Modified F452)Dokument21 Seiten9691-02 Revision Notes (Modified F452)Chew Shu Ren100% (3)
- AT&CD Unit 5Dokument13 SeitenAT&CD Unit 5nothingnewtonnew10Noch keine Bewertungen
- Developing Good Style: CommentingDokument6 SeitenDeveloping Good Style: Commentingstanley umohNoch keine Bewertungen
- Bachelor of Business Administration: (Information Technology)Dokument8 SeitenBachelor of Business Administration: (Information Technology)Shivam TripathiNoch keine Bewertungen
- Chapter 7Dokument8 SeitenChapter 7Saud MustafaNoch keine Bewertungen
- C Proramming NotemakingKTUDokument49 SeitenC Proramming NotemakingKTUSreenath MP SreeNoch keine Bewertungen
- What Is A Programming AlgorithmDokument10 SeitenWhat Is A Programming AlgorithmWalea Nama DhugaNoch keine Bewertungen
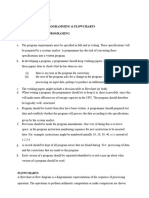
- 1-Program Design and AnalysisDokument6 Seiten1-Program Design and AnalysisUmer AftabNoch keine Bewertungen
- How To Improve Your Skills As A Programmer: StepsDokument7 SeitenHow To Improve Your Skills As A Programmer: StepsHarsh KhajuriaNoch keine Bewertungen
- BCA I Year C NotesDokument36 SeitenBCA I Year C NotesSandyNoch keine Bewertungen
- CS6456Dokument164 SeitenCS6456ramyajesiNoch keine Bewertungen
- Au CP33 2 PDFDokument22 SeitenAu CP33 2 PDFandresboy123Noch keine Bewertungen
- Notes On Writing CodeDokument16 SeitenNotes On Writing CodeMinz14100% (1)
- (A) Computer Application 40 Marks TheoryDokument8 Seiten(A) Computer Application 40 Marks TheoryGourav SainiNoch keine Bewertungen
- Structured Programming (Modular ProgrammingDokument4 SeitenStructured Programming (Modular ProgrammingnidhipradipwaghmareNoch keine Bewertungen
- Getting The Least Out of Your C Compiler: Class #508, Embedded Systems Conference San Francisco 2001Dokument15 SeitenGetting The Least Out of Your C Compiler: Class #508, Embedded Systems Conference San Francisco 2001quest_scienceNoch keine Bewertungen
- Interview Level QA On CDokument20 SeitenInterview Level QA On CRam BhardwajNoch keine Bewertungen
- C Lecture 1Dokument127 SeitenC Lecture 1vempadareddyNoch keine Bewertungen
- 1 - 3 Program StructureDokument3 Seiten1 - 3 Program StructuregdskumarNoch keine Bewertungen
- ITE 211 MIDTERM Part 1Dokument8 SeitenITE 211 MIDTERM Part 1Tameta ElaishaNoch keine Bewertungen
- PSP - Module 1Dokument24 SeitenPSP - Module 1abilash7907Noch keine Bewertungen
- Programming For Problem Solving Unit 1Dokument10 SeitenProgramming For Problem Solving Unit 1Womba LukamaNoch keine Bewertungen
- Getting The Least Out of Your C Compiler: Class #363, Embedded Systems Conference San Francisco 2002Dokument16 SeitenGetting The Least Out of Your C Compiler: Class #363, Embedded Systems Conference San Francisco 2002Grijesh MishraNoch keine Bewertungen
- Week 5 ModuleDokument19 SeitenWeek 5 ModuleWawi Dela RosaNoch keine Bewertungen
- FUNCTIONING PROGRAMMING, ALGORITHMS, CODE EDITORS & Amp OPERATING SYSTEMSDokument4 SeitenFUNCTIONING PROGRAMMING, ALGORITHMS, CODE EDITORS & Amp OPERATING SYSTEMSBayeNoch keine Bewertungen
- IP Unit 1Dokument35 SeitenIP Unit 1Harsh GuptaNoch keine Bewertungen
- Introduction To Assembly Language ProgrammingDokument27 SeitenIntroduction To Assembly Language ProgrammingKamini SalunkheNoch keine Bewertungen
- 07 Good Programming StyleDokument6 Seiten07 Good Programming StyleShreya SagarNoch keine Bewertungen
- Algorithm & FLowchartDokument6 SeitenAlgorithm & FLowcharteren.ioNoch keine Bewertungen
- PASCAL ProgrammingDokument12 SeitenPASCAL ProgrammingArmynat Hardeybympe SarnnieNoch keine Bewertungen
- 8086 Family Assembly Language Programming - : Lecture Note OnDokument6 Seiten8086 Family Assembly Language Programming - : Lecture Note Onnskprasad89Noch keine Bewertungen
- CS211 Flow Control StructuresDokument29 SeitenCS211 Flow Control StructuresJackson MtongaNoch keine Bewertungen
- Computer Programming Lab ManualDokument159 SeitenComputer Programming Lab ManualMuhammad AttiqueNoch keine Bewertungen
- CS8251 Programming in CDokument51 SeitenCS8251 Programming in CHarish SNoch keine Bewertungen
- CS8251 Programming in CDokument51 SeitenCS8251 Programming in CHarish SNoch keine Bewertungen
- 02 Overview of C Programming LanguageDokument16 Seiten02 Overview of C Programming LanguageSuleman SaleemNoch keine Bewertungen
- Introduction To Robot CDokument11 SeitenIntroduction To Robot CleonardoduarteNoch keine Bewertungen
- Important Question For C LanguageDokument14 SeitenImportant Question For C Languageabhilash gowdaNoch keine Bewertungen
- Introduction To Assembly Language ProgrammingDokument27 SeitenIntroduction To Assembly Language ProgrammingKa Tze TingNoch keine Bewertungen
- How Do You Use A Pointer To A Function?Dokument6 SeitenHow Do You Use A Pointer To A Function?itsaurabh1Noch keine Bewertungen
- Efficient Programming Techniques For Digital Signal ProcessingDokument9 SeitenEfficient Programming Techniques For Digital Signal ProcessingRajendra NagarNoch keine Bewertungen
- BABI Feb'19 Prep - Programming Basics - v1-1Dokument4 SeitenBABI Feb'19 Prep - Programming Basics - v1-1ARNOLD BIJAY SargunamNoch keine Bewertungen
- Q1. Define Array With Syntax and ExampleDokument9 SeitenQ1. Define Array With Syntax and Examplekanika_0711Noch keine Bewertungen
- Software EngineeringDokument10 SeitenSoftware Engineeringdinesh vNoch keine Bewertungen
- Program Analysis FycsDokument10 SeitenProgram Analysis FycsshubhamkhandeNoch keine Bewertungen
- 4-The Art of Assembly Language ProgrammingDokument11 Seiten4-The Art of Assembly Language Programmingafzal_a50% (4)
- Introduction To Algorithms and Programming Languages: Oxford University Press 2012. All Rights ReservedDokument16 SeitenIntroduction To Algorithms and Programming Languages: Oxford University Press 2012. All Rights ReservedManan KakkarNoch keine Bewertungen
- 6.1. Introduction To Optimization: Meaning and Scope of OptimizationDokument8 Seiten6.1. Introduction To Optimization: Meaning and Scope of OptimizationShanmuga NathanNoch keine Bewertungen
- Unit 3: Software Design: TopicsDokument13 SeitenUnit 3: Software Design: TopicsNarendra kumarNoch keine Bewertungen
- (U1) Programming ParadigmDokument4 Seiten(U1) Programming ParadigmJamari McFarlaneNoch keine Bewertungen
- CSC 203 Week 2Dokument9 SeitenCSC 203 Week 2segdavid03Noch keine Bewertungen
- Java Week 1-10Dokument32 SeitenJava Week 1-10chadskie20Noch keine Bewertungen
- A Style Guide For Modern RPG and ILE, Part 1Dokument15 SeitenA Style Guide For Modern RPG and ILE, Part 1blackwolfNoch keine Bewertungen
- DipDokument12 SeitenDipsachin81185Noch keine Bewertungen
- Modern Nepal College, Bagbazar, KathmanduDokument8 SeitenModern Nepal College, Bagbazar, KathmandukulNoch keine Bewertungen
- Imperative prog-WPS OfficeDokument2 SeitenImperative prog-WPS OfficeYohan JamesNoch keine Bewertungen
- Bug Killing Standards For Firmware CodingDokument7 SeitenBug Killing Standards For Firmware Codingkunduru_reddy_3Noch keine Bewertungen
- Plagiarism - ReportDokument3 SeitenPlagiarism - ReportDominicNoch keine Bewertungen
- Crop Rotation Benefits 91914Dokument2 SeitenCrop Rotation Benefits 91914DominicNoch keine Bewertungen
- Self-Quiz Unit 5Dokument4 SeitenSelf-Quiz Unit 5DominicNoch keine Bewertungen
- Week2 Intro Knowledge RepresentationDokument22 SeitenWeek2 Intro Knowledge RepresentationDominicNoch keine Bewertungen
- Introduction To Intelligence SystemsDokument13 SeitenIntroduction To Intelligence SystemsDominicNoch keine Bewertungen
- Knowledge and Expert SystemsDokument31 SeitenKnowledge and Expert SystemsAnurag PatidarNoch keine Bewertungen
- 01 Intelligent Systems-IntroductionDokument82 Seiten01 Intelligent Systems-IntroductionDominicNoch keine Bewertungen
- Finite Capacity SchedulingDokument66 SeitenFinite Capacity SchedulingvagueNoch keine Bewertungen
- Group Technology and Cellular ManufacturingDokument109 SeitenGroup Technology and Cellular Manufacturingagrawalrohit_228384Noch keine Bewertungen
- Intelligence Systems OutlineDokument2 SeitenIntelligence Systems OutlineDominicNoch keine Bewertungen
- FmsDokument17 SeitenFmsDominicNoch keine Bewertungen
- FlowchartsDokument25 SeitenFlowchartszeru3261172Noch keine Bewertungen
- TMH EmbeddedDokument49 SeitenTMH EmbeddedSRINIVASANNoch keine Bewertungen
- Bjectives: Chapter 1: Introduction To Control Systems ODokument41 SeitenBjectives: Chapter 1: Introduction To Control Systems OYadana1Noch keine Bewertungen
- Concurrent Engineering NotesDokument41 SeitenConcurrent Engineering NotesDominicNoch keine Bewertungen
- Group Technology and Cellular Manufacturing3Dokument87 SeitenGroup Technology and Cellular Manufacturing3DominicNoch keine Bewertungen
- Basic PLCDokument77 SeitenBasic PLCrpshvju100% (1)
- ArcweldingbasicsDokument61 SeitenArcweldingbasicsapi-302554558Noch keine Bewertungen
- Management Paper On EmpowermentDokument8 SeitenManagement Paper On Empowermentjpsrchua20Noch keine Bewertungen
- Heizer10e Tut3Dokument10 SeitenHeizer10e Tut3Ralf SanderNoch keine Bewertungen
- MaintenanceDokument9 SeitenMaintenanceKumar GaneshNoch keine Bewertungen
- Quality Control ManualDokument134 SeitenQuality Control ManualQausain Ali100% (2)
- ReliabilityDokument24 SeitenReliabilityDominicNoch keine Bewertungen
- Maintenance PlanningDokument40 SeitenMaintenance PlanningDominicNoch keine Bewertungen
- Welding and CuttingDokument25 SeitenWelding and CuttingAnonymous XybLZfNoch keine Bewertungen
- Mercusuar Uzone IdDokument26 SeitenMercusuar Uzone Idenni fitriaNoch keine Bewertungen
- Ahmed Mohamed Abd El AzizDokument4 SeitenAhmed Mohamed Abd El AzizAhmed Abdul-azizNoch keine Bewertungen
- Dice Resume CV Abhiram Varma BhupathirajuDokument4 SeitenDice Resume CV Abhiram Varma BhupathirajuvishuchefNoch keine Bewertungen
- Assignment 1213123Dokument5 SeitenAssignment 1213123gtguide101Noch keine Bewertungen
- مكتبة نور كيفية تثبيت Microsoft Visual FoxPro 9 0 3Dokument12 Seitenمكتبة نور كيفية تثبيت Microsoft Visual FoxPro 9 0 3Jorge PorteNoch keine Bewertungen
- KubernetesDokument138 SeitenKubernetessushant pilankar100% (5)
- Get Msguides Com Windows 10 8 1 8 7 TXTPDFDokument1 SeiteGet Msguides Com Windows 10 8 1 8 7 TXTPDFJan MazourNoch keine Bewertungen
- MOSHELL Commands v14Dokument76 SeitenMOSHELL Commands v14หนุ่ย วิชัย100% (1)
- Program ObjectivesDokument5 SeitenProgram ObjectivesAlvinNoch keine Bewertungen
- CP600 Webinar Trends, Alarms and Recipes Rev0Dokument28 SeitenCP600 Webinar Trends, Alarms and Recipes Rev0Fabio Passos GuimaraesNoch keine Bewertungen
- IBM Maximo, Understand Application ActionDokument9 SeitenIBM Maximo, Understand Application ActionMohamed Lamine HakounaNoch keine Bewertungen
- Historian AdminDokument355 SeitenHistorian AdminMinh Nhut LUUNoch keine Bewertungen
- AUTOMATION STUDIO Quick Start Guide - PLC Allen Bradley (JIC Standard)Dokument9 SeitenAUTOMATION STUDIO Quick Start Guide - PLC Allen Bradley (JIC Standard)NixiusNoch keine Bewertungen
- Cyber SecurityDokument84 SeitenCyber SecurityMerugu MahenderNoch keine Bewertungen
- Edpm NotesDokument3 SeitenEdpm NotesAnisahNoch keine Bewertungen
- Alert Log From Sqlplus PromptDokument5 SeitenAlert Log From Sqlplus PromptAnkit Ashok AggarwalNoch keine Bewertungen
- Adobe Crack READ ThisDokument3 SeitenAdobe Crack READ Thisfitrah adhityaNoch keine Bewertungen
- Packetlight Lightwatch: Nms/EmsDokument2 SeitenPacketlight Lightwatch: Nms/Emsmcclaink06Noch keine Bewertungen
- Osln PDFDokument183 SeitenOsln PDFAbdallah TebibNoch keine Bewertungen
- Python Idle NewsDokument23 SeitenPython Idle NewsKonstantin VeličkovićNoch keine Bewertungen
- C++ Builder Programming 2nd Edition PDFDokument820 SeitenC++ Builder Programming 2nd Edition PDFRaul MăniuțiuNoch keine Bewertungen
- Session 2Dokument42 SeitenSession 2Isaac KariukiNoch keine Bewertungen
- Database Migration From MySql To Oracle 11g Using Golden GateDokument8 SeitenDatabase Migration From MySql To Oracle 11g Using Golden GateArshad Taqvi100% (2)
- 001429138Dokument256 Seiten001429138Mithaq AbdullaNoch keine Bewertungen
- Installation ProcessDokument5 SeitenInstallation ProcessHarshit KaushalNoch keine Bewertungen
- TilePlanner - 2021 Floor and Decor Room Planner User Manual - RedDokument21 SeitenTilePlanner - 2021 Floor and Decor Room Planner User Manual - RedKh TurmunkhNoch keine Bewertungen
- Embedded BrochureDokument4 SeitenEmbedded BrochurecmtesinformaticsNoch keine Bewertungen
- GAIL (India) Ltd. Sample Programming Placement Paper Level1Dokument12 SeitenGAIL (India) Ltd. Sample Programming Placement Paper Level1placementpapersampleNoch keine Bewertungen
- Practical No. 1:-Installation of Linux: Steps To Get You Started Do You Have The Right Components?Dokument54 SeitenPractical No. 1:-Installation of Linux: Steps To Get You Started Do You Have The Right Components?Usman GhaniNoch keine Bewertungen
- Student Portal & Mobile Application User ManualDokument23 SeitenStudent Portal & Mobile Application User ManualSnehal Singh100% (1)