Upper Tittabawassee River
Hydrographic and Geophysical Survey
Reach D
Survey Report
May 7, 2007
Prepared by:
Tetra Tech EC, Inc.
19803 North Creek Parkway
Bothell, WA 98011
(425) 482 7600
Reach D Survey Report
Table of Contents
1 Overview................................................................................................................................ 1-1
2 System Setup.......................................................................................................................... 2-1
2.1 Interconnections........................................................................................................... 2-1
2.2 Device Offsets.............................................................................................................. 2-3
2.2.1 Hypack/Hysweep Offsets.................................................................................. 2-3
2.3 Sonar Mount................................................................................................................. 2-3
2.4 Geodesy Settings.......................................................................................................... 2-5
2.5 GPS Reference Station................................................................................................. 2-6
3 Bathymetry Results................................................................................................................ 3-1
4 Sub-Bottom Profile Results ................................................................................................... 4-1
List of Figures
Figure 2-1 - 8125 Multibeam Survey System.............................................................................. 2-2
Figure 2-2 - Multibeam Sonar on Side Mount............................................................................. 2-4
Figure 2-3 - SeaBat 8125, C3D Sidescan and SB-424 on TtEC Jet boat .................................... 2-5
Figure 3-1 - Tittabawassee River Reach D Bathymetry – April 2007......................................... 3-2
Figure 3-2 - Sediment Bedforms in Main Channel...................................................................... 3-3
Figure 3-3 - Scour Above South Pipe Bridge Support ................................................................ 3-3
Figure 4-1 - Edgetech SB-216 Towfish mount used for data collection in Reach D ................. 4-2
Figure 4-2 - Edgetech SB-424 data collected .............................................................................. 4-3
Figure 4-3 - SB-216 Subbottom Data .......................................................................................... 4-4
Figure 4-4 - Tittabawassee River Reach D Example Sub-bottom Profile ................................... 4-5
List of Tables
Table 1-1 - Survey Team ............................................................................................................. 1-1
Table 2-1 - Survey Equipment..................................................................................................... 2-1
Table 2-2 - Communications Settings.......................................................................................... 2-3
Table 2-3 - Sensor Offsets (feet).................................................................................................. 2-3
Table 2-4 - Survey Geodesy Settings........................................................................................... 2-5
Table 2-5 - OPUS and NGS Control............................................................................................ 2-6
Table 2-6 - Overlook Park (OL-001) OPUS Point QC Checks ................................................... 2-7
Reach D Survey Report Page iii
1 Overview
The following document describes a survey which was conducted for Ann Arbor Technical
Services (ATS), Ann Arbor, MI, by Tetra Tech EC, Inc (TtEC), in April, 2007, under contract
32907. The primary survey equipment included a multibeam sonar system, sub-bottom profilers
(SBP), sidescan sonar, and associated vessel navigation and attitude measurement equipment.
These systems were used to map site bathymetry and characterize the river bottom and
subbottom conditions to support sediment studies and potential remediation actions. Table 1-1
lists the personnel and their roles in the survey.
Table 1-1 - Survey Team
Name Project Role
Robert Feldpausch Project Manager/Senior Hydrographer
Richard Funk Senior Geophysicist
Burton Bridge Senior Hydrographer/Programmer
David Humes Hydrographer/RTK GPS Technician
Derek Oklejewicz RTK GPS/Subbottom Technician
Lou Schwartz Survey Vessel Captain
Reach D Survey Report Page 1-1
2 System Setup
The survey systems were installed on a 21 foot jet boat owned by TtEC. The equipment used for
the survey is shown in Table 2-1. Data sheets for the main survey systems are included in
Appendix C.
Table 2-1 - Survey Equipment
Sensor Type Manufacturer/Model
Multibeam Sonar RESON SeaBat 8125
Motion Sensor Applanix WaveMaster
Heading Applanix WaveMaster
Position Leica 1230 RTK GPS/ Applanix WaveMaster
Sub-bottom Profiler Edgetech 3100 w/SB-424 and SB-216 towfish
Sidescan Sonar Benthos C3D
Sound Speed Profilers Seabird SBE-19 and MicroCat
Data collection and navigation software, for the bathymetry and sidescan surveys, was
Hypack®/Hysweep®. The SBP data were collected using Edgetech 3100-P hardware and
Discover software v3.42.
Software settings for bathymetry data acquisition include the serial I/O configuration and sensor
offsets in Hypack, and Hypack Navigation device offsets in the HySweep hardware
configuration.
2.1 Interconnections
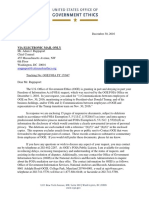
Figure 2-1 shows the data flow and communications setup for the devices which make up the
survey system. Table 2-2 lists the settings for each of the data communication links.
Reach D Survey Report Page 2-1
Figure 2-1 - 8125 Multibeam Survey System
Reach D Survey Report Page 2-2
Table 2-2 - Communications Settings
Device Communications link Settings
8125 SeaBat Network imagery data out Local IP 192.168.0.41
Remote IP 192.168.0.50
UDP base port 1032
8125 SeaBat UTC time sync in COM 1 – 9600, N, 8, 1
WaveMaster TSS1 roll, pitch, heave out 19200, N, 8, 1, 50 Hz update
motion
WaveMaster NMEA HDT heading 19200, N, 8, 1, 1 Hz update
heading
Leica position NMEA GGA position 19200, N, 8, 1, 10 Hz update
Leica time NMEA ZDA time 19200, N, 8, 1, 1 Hz update
2.2 Device Offsets
Device offsets are precisely defined for the multibeam sonar, attitude sensor and GPS antenna, so
that the Hypack/HySweep acquisition software can accurately convert the input sonar and
support sensor data into XYZ soundings on the earth.
2.2.1 Hypack/Hysweep Offsets
The following offsets, in feet, were used for the Hypack and HySweep sensors:
Table 2-3 - Sensor Offsets (feet)
Sensor Across Along Vertical
SeaBat 8125 4.49 -4.00 1.67
Motion Sensor (WaveMaster) 0.00 0.00 1.10
Hypack Navigation (Leica RTK antenna) 0.00 0.49 -6.49
Edgetech SB-424/216 towfish bow mount -1.4 12.6 -0.40
Edgetech SB-424 towfish stbd side mount 6.42 -0.50 -0.40
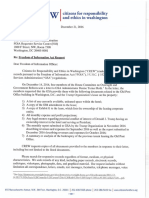
2.3 Sonar Mount
The sonar head was mounted to the vessel using a side mount pole, as shown in Figure 2-2. The
mount is rigidly attached to the side of the vessel. The sidescan system was mounted on a bow
mount, shown in Figure 2-3. This figure also shows the subbottom profiler towfish, which was
suspended from a pole mounted on the port bow.
Reach D Survey Report Page 2-3
Figure 2-2 - Multibeam Sonar on Side Mount
Reach D Survey Report Page 2-4
Figure 2-3 - SeaBat 8125, C3D Sidescan and SB-424 on TtEC Jet boat
2.4 Geodesy Settings
The geodesy settings shown in Table 2-4 were used for the project.
Table 2-4 - Survey Geodesy Settings
Parameter Setting
Grids State Plane NAD-83
Zone MI-2113 Michigan South
Distance Unit International Feet
Depth Unit International Feet
Ellipsoid NAD-83
Elevation NAVD-88
Reach D Survey Report Page 2-5
2.5 GPS Reference Station
At the time of the mobilization, the only pre-defined high quality survey control point in the area
was the National Geodetic Survey (NGS) FREELAND (PID OK0006) Primary Airport Control
Station located at the Tri-City International Airport. The NGS Data Sheet for this control is
provided in Appendix A.
Since no national or state agency control points were available in locations suitable for setting up
a RTK base station, the NGS Online Positioning User Service (OPUS) was used to establish
geodetic control points. Wade-Trim, a local survey company, provided two locations where they
had previously determined coordinates using RTK GPS. An RTK capable GPS was set up over
the points for a period of approximately 2 hours, throughout this period data were recorded. The
data were then transferred to NGS OPUS via the internet for processing. Based on this data NGS
OPUS provided the reports included in Appendix A, which were used for Reach D control.
Additional OPUS points were established for quality control (QC) purposes.
Table 2-5 presents the NGS control and OPUS points that were utilized and established.
Table 2-5 - OPUS and NGS Control
TtEC NAVD88
OPUS/NGS Easting Northing Elevation
Point ID Location (intl. ft) (intl. ft) (intl. ft)
OL-001 Overlook Park 13155390.928 761695.254 641.939
Bayliss Bayliss Street 13161664.873 768808.503 628.281
Munic-001 Gordinville St. 13168800.639 754254.256 618.278
Bridge
Freeland - PID MBS Airport 13196592.800 737331.583 667.854
OK00006
Reach D Survey Report Page 2-6
All OPUS points were subsequently checked with an RTK GPS rover system receiving
corrections from the Michigan Department of Transportation (MDOT) Continuously Operating
Reference Station (CORS) system. The overall system of reference stations, processing center
and communications links is referred to as the Michigan Spatial Reference Network (MSRN).
Table 2-6 shows the results of the QC checks performed on the Overlook Park OPUS point used
as the location for the base station.
Table 2-6 - Overlook Park (OL-001) OPUS Point QC Checks
Easting Northing Elevation
Correction/ Results Results Results Date
Tested by Difference (intl. ft) (intl. ft) (intl. ft) Performed
TtEC MSRN 13155390.932 761695.235 641.900 4/5/2007
DIFF 0.004 -0.019 -0.039
Wade-Trim MSRN 13155390.940 761695.264 641.848 4/3/2007
DIFF 0.012 0.010 -0.091
TtEC MSRN 13155390.874 761695.230 641.800 4/12/2007
DIFF -0.054 -0.024 -0.139
Reach D Survey Report Page 2-7
3 Bathymetry Results
The results from the multibeam bathymetry survey are shown in Figure 3-1 and in Appendix B.
The sonar used for the survey was a RESON SeaBat 8125, which provides a 1 degree beam
along track and a 0.5 across track beam at nadir. This system provides extremely high resolution
data which, when used in conjunction with comparable accuracy motion, heading and position
sensors, can show very fine detail in the morphology of the bottom and in the structure of man-
made objects, such as the sheetpile walls in the reach.
Several significant features are visible in the bathymetry in Reach D.
a. There appears to be a pipeline or similar structure crossing the river at approximately
station 52+75.
b. The high energy sections of the river channel have sediment waves with heights of up to
approximately 1 foot, as shown in Figure 3-2. Lower energy areas have correspondingly
less vertical structure. This indicates that the sediment heights may change significantly
over time.
c. The water flow has induced scour (i.e. sediment erosion) of approximately 3 to 4 ft
around the center channel supports for the Dow bridges within Reach D, as shown in
Figure 3-3.
d. The intake basin shows some ripple in the bottom that is the result of data artifacts.
These ripples are on the order of 0.05 to 0.15 feet and are most likely induced by the
motion sensor. While these small effects are within the heave measurement (high
frequency vertical displacements) accuracy specifications, the visualization software and
the data resolution make them more apparent.
Reach D Survey Report Page 3-1
Figure 3-1 - Tittabawassee River Reach D Bathymetry – April 2007
Reach D Survey Report Page 3-2
Figure 3-2 - Sediment Bedforms in Main Channel
Figure 3-3 - Scour Above South Pipe Bridge Support
Reach D Survey Report Page 3-3
4 Sub-Bottom Profile Results
An Edgetech 3100-P portable sub-bottom profiler, with swept frequencies, from 4 to 24 kHz,
transducer, was run concurrently with the multibeam sonar. This system operates at a low
frequency capable of penetrating bottom sediment and returning data that provides information
related to manmade and/or geologic structures on or underlying the river bottom. The depth to
which the system will operate and provide data is a function of the sonar frequency and the
characteristics of the material in the sub-bottom.
The 3100-P system consists of a towfish with in-water transducers and hydrophone receivers and
a shipboard processing system that received digital data from the towfish. For this project the
SB-424 towfish was suspended in a fixed position just forward of the bow along the port side of
the survey vessel (Figure 2-3) to enable data collection in very shallow water, as well as provide
the best possible positional data that fixed mounting offers. This same mount was adapted and
used for the SB-216 (Figure 4-1) during data collection on May 14. A small inflatable catamaran
was used to support the larger and heavier SB-216 towfish.
An acoustic pulse was generated by the transducers and acoustic reflections from the river sub-
bottom were received by the hydrophones. Data were transmitted via cable from the towfish to
the shipboard processing system workstation running Edgetech’s Discover software. The
processing system logged the return pulse signals and processed the data into time-based cross
sections of the acoustic response of the sub-bottom. By inputting the speed of sound measured at
the site (as determined with a Seabird SBE-19, 1427 ft/sec used) the time sections were
converted into pseudo-depth sections. Data were displayed as pseudo-depth cross sections of
acoustic response with time on a computer screen and logged to computer hard drive and then
transferred and archived to external data storage for permanent storage and later post-processing.
Figure 4-2 shows the only data collected behind the sheet pile wall to show any structure
(collected April 6th). Approximately three layers are discernable to a maximum depth of about
2.5 ft below the bottom. These layers were not compared to core data, but at 2.5 feet below the
bottom, it is not believed that the data extends to the ‘native’ material below the sediment
deposited in the flume. The bottom layer appears to have a gravel component while the
overlying sediment appears to be soft, fine grained material.
Data was collected with the more powerful, and lower frequency SB-216 on May 14th within the
flume area in Reach D. The results were no better than with the SB-424. The one file that spans
the largest area within the flume is presented in Figure 4-3. The May 14th SB-216 data were
colleted at approximately the same river stage as during the April 6th SB-424 data collection.
Figure 4-4 shows a representative sample of the SBP data collected during the survey outside of
the flume area. This survey line was in the main river channel and shows a clearly defined layer
below the existing river bottom. The blue surface is the under side of the digital terrain model
created from the bathymetry (within the IVS Fledermaus software). Data from within the water
intake basin does not show this layering.
Reach D Survey Report Page 4-1
Figure 4-1 - Edgetech SB-216 Towfish mount used for data collection in Reach D
Reach D Survey Report Page 4-2
Figure 4-2 - Edgetech SB-424 data collected
Reach D Survey Report Page 4-3
Figure 4-3 - SB-216 Subbottom Data
Reach D Survey Report Page 4-4
Figure 4-4 - Tittabawassee River Reach D Example Sub-bottom Profile
Reach D Survey Report Page 4-5
Appendix A. NGS Data Sheets / OPUS Solution Reports
NGS Freeland Control Point
The NGS Data Sheet. See file dsdata.txt for more information about the
datasheet. DATABASE = Sybase ,PROGRAM = datasheet, VERSION = 7.42
1 National Geodetic Survey, Retrieval Date = APRIL 5, 2007
OK0006
***********************************************************************
OK0006 FBN - This is a Federal Base Network Control Station.
OK0006 PACS - This is a Primary Airport Control Station.
OK0006 DESIGNATION - FREELAND
OK0006 PID - OK0006
OK0006 STATE/COUNTY- MI/SAGINAW
OK0006 USGS QUAD - AUBURN (1973)
OK0006
OK0006 *CURRENT SURVEY CONTROL
OK0006 ___________________________________________________________________
OK0006* NAD 83(1994)- 43 31 22.32418(N) 084 05 26.01391(W) ADJUSTED
OK0006* NAVD 88 - 203.553 (meters) 667.82 (feet) ADJUSTED
OK0006 ___________________________________________________________________
OK0006 X - 476,921.563 (meters) COMP
OK0006 Y - -4,607,649.372 (meters) COMP
OK0006 Z - 4,369,920.959 (meters) COMP
OK0006 LAPLACE CORR- -2.32 (seconds) DEFLEC99
OK0006 ELLIP HEIGHT- 169.32 (meters) (06/11/02) GPS OBS
OK0006 GEOID HEIGHT- -34.24 (meters) GEOID03
OK0006 DYNAMIC HT - 203.512 (meters) 667.69 (feet) COMP
OK0006 MODELED GRAV- 980,414.7 (mgal) NAVD 88
OK0006 OBS GRAVITY - 980,412.0 (mgal) GRAV_OBS
OK0006
OK0006 HORZ ORDER - A
OK0006 VERT ORDER - SECOND CLASS 0
OK0006 ELLP ORDER - FOURTH CLASS I
OK0006
OK0006.This mark is at Tri City Intl Airport (MBS)
OK0006
OK0006.The horizontal coordinates were established by GPS observations
OK0006.and adjusted by the National Geodetic Survey in July 1992..
OK0006
OK0006.The orthometric height was determined by differential leveling
OK0006.and adjusted by the National Geodetic Survey in June 1991..
OK0006
OK0006.The X, Y, and Z were computed from the position and the ellipsoidal
ht.
OK0006
OK0006.The Laplace correction was computed from DEFLEC99 derived
deflections.
OK0006
OK0006.The ellipsoidal height was determined by GPS observations
OK0006.and is referenced to NAD 83.
OK0006
Reach D Survey Report Page A-1
OK0006.The geoid height was determined by GEOID03.
OK0006
OK0006.The dynamic height is computed by dividing the NAVD 88
OK0006.geopotential number by the normal gravity value computed on the
OK0006.Geodetic Reference System of 1980 (GRS 80) ellipsoid at 45
OK0006.degrees latitude (g = 980.6199 gals.).
OK0006
OK0006.The modeled gravity was interpolated from observed gravity values.
OK0006.The observed gravity was obtained from relative gravimeter ties
OK0006.to the IGSN71 gravity network.
OK0006
OK0006; North East Units Scale Factor
Converg.
OK0006;SPC MI S - 224,738.686 4,022,321.472 MT 0.99996884 +0 11
16.4
OK0006;SPC MI S - 737,331.65 13,196,592.76 iFT 0.99996884 +0 11
16.4
OK0006;UTM 16 - 4,822,993.954 735,128.335 MT 1.00028009 +2 00
16.1
OK0006
OK0006! - Elev Factor x Scale Factor = Combined Factor
OK0006!SPC MI S - 0.99997345 x 0.99996884 = 0.99994229
OK0006!UTM 16 - 0.99997345 x 1.00028009 = 1.00025353
OK0006
OK0006: Primary Azimuth Mark Grid Az
OK0006:SPC MI S - APPOLD 067 32 14.2
OK0006:UTM 16 - APPOLD 065 43 14.5
OK0006
OK0006|---------------------------------------------------------------------
|
OK0006| PID Reference Object Distance Geod. Az
|
OK0006| dddmmss.s
|
OK0006| OJ1071 APPOLD APPROX.11.0 KM 0674330.6
|
OK0006| CH0217 FREELAND RM 1 07459
|
OK0006| CH0218 FREELAND RM 2 18113
|
OK0006| CH0216 FREELAND AZ MK 1823452.8
|
OK0006| OK0505 MIDLAND DOW CHEM N STACK APPROX.15.1 KM 3081227.0
|
OK0006|---------------------------------------------------------------------
|
OK0006
OK0006 SUPERSEDED SURVEY CONTROL
OK0006
OK0006 ELLIP H (07/24/97) 169.38 (m) GP( ) 2
1
OK0006 ELLIP H (07/31/92) 169.30 (m) GP( ) 1
1
OK0006 NAD 83(1986)- 43 31 22.31147(N) 084 05 26.03523(W) AD( ) 1
Reach D Survey Report Page A-2
OK0006 NAD 27 - 43 31 22.21629(N) 084 05 26.10915(W) AD( ) 1
OK0006 NAVD 88 (11/28/94) 203.55 (m) 667.8 (f) LEVELING 3
OK0006 NAVD 88 (09/30/91) 203.55 (m) 667.8 (f) LEVELING 3
OK0006 NGVD 29 (??/??/92) 203.732 (m) 668.41 (f) ADJ UNCH 2
0
OK0006
OK0006.Superseded values are not recommended for survey control.
OK0006.NGS no longer adjusts projects to the NAD 27 or NGVD 29 datums.
OK0006.See file dsdata.txt to determine how the superseded data were
derived.
OK0006
OK0006_U.S. NATIONAL GRID SPATIAL ADDRESS: 16TGP3512822994(NAD 83)
OK0006_MARKER: DS = TRIANGULATION STATION DISK
OK0006_SETTING: 7 = SET IN TOP OF CONCRETE MONUMENT
OK0006_SP_SET: CONCRETE POST
OK0006_STAMPING: FREELAND 1932
OK0006_MARK LOGO: CGS
OK0006_PROJECTION: RECESSED 15 CENTIMETERS
OK0006_MAGNETIC: N = NO MAGNETIC MATERIAL
OK0006_STABILITY: C = MAY HOLD, BUT OF TYPE COMMONLY SUBJECT TO
OK0006+STABILITY: SURFACE MOTION
OK0006_SATELLITE: THE SITE LOCATION WAS REPORTED AS SUITABLE FOR
OK0006+SATELLITE: SATELLITE OBSERVATIONS - May 30, 2004
OK0006
OK0006 HISTORY - Date Condition Report By
OK0006 HISTORY - 1932 MONUMENTED CGS
OK0006 HISTORY - 1948 SEE DESCRIPTION CGS
OK0006 HISTORY - 1955 SEE DESCRIPTION CGS
OK0006 HISTORY - 1957 SEE DESCRIPTION CGS
OK0006 HISTORY - 1958 SEE DESCRIPTION USGS
OK0006 HISTORY - 1966 GOOD NGS
OK0006 HISTORY - 1969 SEE DESCRIPTION CGS
OK0006 HISTORY - 1976 GOOD NGS
OK0006 HISTORY - 1980 GOOD MIDH
OK0006 HISTORY - 1987 GOOD NGS
OK0006 HISTORY - 19891023 GOOD NGS
OK0006 HISTORY - 19900426 GOOD NGS
OK0006 HISTORY - 19910108 GOOD LOCENG
OK0006 HISTORY - 19910108 GOOD LOCENG
OK0006 HISTORY - 19910625 GOOD NGS
OK0006 HISTORY - 19931004 GOOD NGS
OK0006 HISTORY - 19940512 GOOD NGS
OK0006 HISTORY - 19960507 GOOD MIDT
OK0006 HISTORY - 20010426 GOOD MIDT
OK0006 HISTORY - 20011203 GOOD NGS
OK0006 HISTORY - 20040511 GOOD INDIV
OK0006 HISTORY - 20040530 GOOD WADTRI
OK0006
OK0006 STATION DESCRIPTION
OK0006
OK0006'DESCRIBED BY COAST AND GEODETIC SURVEY 1932 (HCW)
OK0006'ABOUT 9 MILES NORTHWEST
OK0006'OF SAGINAW, 1 MILE
OK0006'EAST OF FREELAND, IN NW 1/4 SEC. 23, T. 13 N., R. 3 E., ON LAND
Reach D Survey Report Page A-3
OK0006'OWNED BY MR. WILLIAM WAGNER, 1 FOOT
OK0006'EAST OF EAST RIGHT-OF-WAY FENCE OF NORTH-AND-SOUTH
OK0006'CONCRETE ROAD, 29 FEET EAST OF CENTER LINE OF ROAD, 35
OK0006'FEET NORTH OF NORTHEAST
OK0006'CORNER OF CONCRETE CULVERT, AND ABOUT 20 YARDS WEST OF LARGE
OK0006'UNPAINTED BARN. TO REACH
OK0006'FROM SAGINAW RIVER BRIDGE, GO WEST 9.2 MILES ON U.S. ROUTE 10 TO
OK0006'POINT WHERE U.S. ROUTE 10
OK0006'GOES TO LEFT AND CONCRETE ROAD GOES TO RIGHT (NORTH) (THIS
OK0006'POINT IS 4.1 MILES NORTHWEST OF
OK0006'JUNCTION OF U.S. ROUTE 10 AND ROUTE M-47),
OK0006'TURN NORTH ONTO CONCRETE ROAD, AND GO 2.6 MILES TO
OK0006'STATION SITE OPPOSITE BARN.
OK0006'SURFACE AND UNDERGROUND MARKS ARE STANDARD DISK STATION MARKS IN
OK0006'CONCRETE, NOTES 1A AND
OK0006'7A. UPPER MARK PROJECTS 4 INCHES. REFERENCE AND AZIMUTH MARKS
OK0006'ARE STANDARD REFERENCE MARKS IN
OK0006'CONCRETE, NOTE 11A. NO. 1 PROJECTS 6 INCHES,
OK0006'IS 44 FEET NORTH OF NORTHEAST CORNER OF
OK0006'ABOVE-MENTIONED BARN, 6 FEET WEST OF NORTHWEST
OK0006'CORNER OF SMALL SHED, AND 136.95 FEET FROM STATION IN
OK0006'AZIMUTH 254 DEG. 58 MIN. NO. 2
OK0006'PROJECTS 5 INCHES, IS IN EAST RIGHT-OF-WAY FENCE, 28 FEET EAST OF
OK0006'CENTER LINE OF ABOVE-MENTIONED
OK0006'CONCRETE ROAD, ABOUT 50 YARDS SOUTHWEST OF SOUTHWEST CORNER
OK0006'OF BARN, AND 158.51 FEET FROM
OK0006'STATION IN AZIMUTH 1 DEG. 13 MIN. AZIMUTH MARK PROJECTS
OK0006'5 INCHES, IS 27 FEET WEST OF CENTER LINE OF
OK0006'NORTH-AND-SOUTH CONCRETE ROAD, 3 FEET
OK0006'NORTH OF TELEPHONE POLE, 15 FEET NORTHWEST OF NORTHWEST CORNER
OK0006'OF CONCRETE CULVERT, AND
OK0006'APPROXIMATELY 0.35 MILE FROM STATION IN AZIMUTH 2 DEG. 34 MIN. 49
OK0006'SEC.
OK0006
OK0006 STATION RECOVERY (1948)
OK0006
OK0006'RECOVERY NOTE BY COAST AND GEODETIC SURVEY 1948 (WIB)
OK0006'STATION IN EXCELLENT CONDITION.
OK0006'RECOVERED AS
OK0006'DESCRIBED IN SPECILA PUBLICATION 214, EXCEPT
OK0006'FOR THE FOLLOWING-
OK0006'
OK0006'ADD TO DESCRIPTION - 17 FEET SE OF THE SE CORNER OF A CONCRETE
OK0006'CULVERT.
OK0006'
OK0006'DELETE FROM DESCRIPTION - UPPER MARK PROJECTS 4 INCHES.
OK0006'THIS MARK IS NOW
OK0006'ABOUT 2 INCHES BELOW THE SURFACE OF THE GROUND.
OK0006'
OK0006'R.M. 1 IS TILTED OUT OF POSITION AND THE DISK IS ALSO
OK0006'CRACKED IN TWO
OK0006'PIECES. ONE HALF IS STILL FIRMLY ATTACHED TO THE
OK0006'CONCRETE POST, THE OTHER HALF IS
OK0006'LOOSE AND WILL SOMEDAY BE REMOVED.
Reach D Survey Report Page A-4
OK0006'DELETE REFERENCE TO SMALL SHED.
OK0006'
OK0006'R.M.S 2 AND 3 ARE IN GOOD CONDITION. RECOVERED AS DESCRIBED.
OK0006
OK0006 STATION RECOVERY (1955)
OK0006
OK0006'RECOVERY NOTE BY COAST AND GEODETIC SURVEY 1955 (LWQ)
OK0006'THE STATION, REFERENCE MARKS, AND AZIMUTH MARK WERE
OK0006'RECOVERED. ONE
OK0006'HALF OF THE DISK OF REFERENCE MARK 1 IS MISSING,
OK0006'AND REFERENCE MARK 2 IS TILTED.
OK0006'THE STATION AND AZIMUTH MARK ARE
OK0006'IN GOOD CONDITION. THE DESCRIPTIONS ARE ADEQUATE.
OK0006
OK0006 STATION RECOVERY (1957)
OK0006
OK0006'RECOVERY NOTE BY COAST AND GEODETIC SURVEY 1957 (LFV)
OK0006'STATION AND REFERENCE MARKS RECOVERED AS DESCRIBED,
OK0006'EXCEPT FOR THE
OK0006'FOLLOWING-
OK0006'
OK0006'BARN, SHED, AND CONCRETE CULVERT MENTIONED IN ORIGINAL DESCRIPTION
OK0006'NO LONGER EXIST.
OK0006'
OK0006'STATION RECOVERED IN GOOD CONDITION, 29.1 FT. E OF THE CENTERLINE
OK0006'OF A N-S ROAD,
OK0006'21.5 FT. S-SW OF A POWER POLE, 17.3 FT. SE OF
OK0006'THE S END OF A CULVERT UNDER THE
OK0006'N-S ROAD, AND 3.0 FT. W OF A FENCE.
OK0006'MARK IS FLUSH WITH THE GROUND.
OK0006'
OK0006'AZIMUTH MARK COULD NOT BE RECOVERED AFTER A THOROUGH SEARCH
OK0006'OF THE AREA. MARK
OK0006'WAS PROBABLY DESTROYED WHEN CULVERT UNDER THE
OK0006'ROAD WAS CHANGED, AND AREA IN
OK0006'VICINITY OF MARK WAS GRADED DURING
OK0006'CONSTRUCTION OF TRI-CITY AIRPORT.
OK0006'
OK0006'REFERENCE MARK 1 IS 57.0 FT. NW OF A POWER POLE, 45.6 FT. W
OK0006'OF A FENCE CORNER,
OK0006'1.5 FT. S OF A FENCE. MARK PROJECTS ABOUT 6
OK0006'IN. AND APPEARS TO HAVE BEEN SLIGHTLY
OK0006'DISTURBED.
OK0006'
OK0006'REFERENCE MARK 2 IS 119.6 FT S-SE OF THE S END OF THE CONCRETE
OK0006'CULVERT UNDER THE
OK0006'N-S ROAD, AND 28.2 FT. E OF THE CENTERLINE
OK0006'OF THE N-S ROAD. MARK PROJECTS
OK0006'ABOUT 6 IN. AND APPEARS TO HAVE
OK0006'BEEN SLIGHTLY DISTURBED.
OK0006'
OK0006'TO REACH THE STATION FROM THE STOP LIGHT AT THE INTERSECTION
OK0006'OF MAIN (U.S.
OK0006'ROUTE 10), AND WASHINGTON STREETS IN FREELAND, GO
Reach D Survey Report Page A-5
OK0006'1.7 MI. E ON WASHINGTON TO
OK0006'T-ROAD (S), TURN RIGHT AND GO 0.1 MI.
OK0006'S TO THE STATION ON THE LEFT.
OK0006
OK0006 STATION RECOVERY (1958)
OK0006
OK0006'RECOVERY NOTE BY US GEOLOGICAL SURVEY 1958
OK0006'STATION RECOVERED IN GOOD CONDITION.
OK0006'
OK0006'THE STATION IS LOCATED 1-1/2 MILES EAST OF FREELAND, ABOUT 1/2 MILE
OK0006'SOUTH OF TRI-CITY
OK0006'AIRPORT, NEAR CORNER SECS. 14, 15, 22, AND 23, T 13 N, R 3 E, 640
OK0006'FEET SOUTH AND 29 FEET EAST OF
OK0006'T-ROAD SOUTH, 68 FEET SOUTH OF A ROAD NORTHEAST, 21 FEET SOUTH
OK0006'AND 5 FEET WEST OF A POWER POLE, IN
OK0006'CONCRETE POST, A STANDARD U.S.C. AND G.S. DIKS,
OK0006'STAMPED FREELAND 1932.
OK0006
OK0006 STATION RECOVERY (1966)
OK0006
OK0006'RECOVERY NOTE BY NATIONAL GEODETIC SURVEY 1966
OK0006'1 MI E FROM FREELAND.
OK0006'ABOUT 9 MILES NORTHWEST OF SAGINAW, 1 MILE EAST OF FREELAND
OK0006'AT THE SOUTHWEST EDGE OF THE TRI-CITY AIRPORT, 2 FEET WEST OF
OK0006'A RIGHT OF WAY FENCE, 29 FEET EAST OF THE CENTERLINE OF A
OK0006'CONCRETE ROAD, 35 FEET NORTH OF THE NORTHEAST CORNER OF A
OK0006'CONCRETE CULVERT, 17 FEET SOUTHEAST OF THE SOUTHEAST CORNER
OK0006'OF A CONCRETE CULVERT. A STANDARD TRIANGULATION DISK STAMPED
OK0006'FREELAND 1932 SET IN THE TOP OF A CONCRETE POST ABOUT TWO
OK0006'INCHES BELOW THE SURFACE OF THE GROUND.
OK0006
OK0006 STATION RECOVERY (1969)
OK0006
OK0006'RECOVERY NOTE BY COAST AND GEODETIC SURVEY 1969 (WTJ)
OK0006'STATION RECOVERED AS DESCRIBED BY USGS IN 1958. RMS AND AZIMUTH NOT
OK0006'SEARCHED FOR.
OK0006'
OK0006'AIRLINE DISTANCE AND DIRECTION FROM NEAREST TOWN- 1.5 MILES E. OF
OK0006'FREELAND
OK0006
OK0006 STATION RECOVERY (1976)
OK0006
OK0006'RECOVERY NOTE BY NATIONAL GEODETIC SURVEY 1976 (RPD)
OK0006'RECOVERED IN GOOD CONDITION AS DESCRIBED.
OK0006'
OK0006'AIRLINE DISTANCE AND DIRECTION FROM NEAREST TOWN--1.0 MILE EAST OF
OK0006'FREELAND.
OK0006
OK0006 STATION RECOVERY (1980)
OK0006
OK0006'RECOVERY NOTE BY MI DEPT OF HIGHWAYS 1980 (GK)
OK0006'THE STATION WAS FOUND IN GOOD CONDITION.
OK0006'
OK0006'THE REFERENCE MARKS WERE FOUND IN GOOD CONDITION.
Reach D Survey Report Page A-6
OK0006
OK0006 STATION RECOVERY (1987)
OK0006
OK0006'RECOVERY NOTE BY NATIONAL GEODETIC SURVEY 1987 (RLR)
OK0006'STATION IS LOCATED ABOUT 9 MILES NORTHWEST OF SAGINAW,
OK0006'4 MILES SOUTHEAST OF MIDLAND AND 1 MILE EAST OF FREELAND
OK0006'AT THE SOUTHWEST EDGE OF THE TRI-CITY AIRPORT AND INSIDE
OK0006'A CHAIN-LINK FENCE AT THE JUNCTION OF A SERVICE ROAD AND THE
OK0006'OLD EXTENTION OF GARFIELD ROAD. IT IS A STANDARD NGS
OK0006'TRIANGULATION DISK SET INTO THE TOP OF A SQUARE CONCRETE
OK0006'MONUMENT ABOUT 6-INCHES BELOW THE SURFACE. LOCATED 10.66
OK0006'M., 35.0 FEET NORTH-NORTHEAST OF THE NORTH END OF CONCRETE
OK0006'HEADWALL OF A BOX CULVERT UNDER THE NORTH-SOUTH ROAD,
OK0006'9.144 M., 30.0 FEET EAST OF THE CENTER OF THE PAVED ROAD,
OK0006'6.096 M., 20.0 FEET SOUTH OF THE EAST END OF A CONCRETE
OK0006'CULVERT UNDER THE NORTH-SOUTH ROAD, 2.896 M., 9.5 FEET
OK0006'NORTH OF A UTILITY POLE, 0.610 M., 2.0 FEET SOUTH
OK0006'-SOUTHWEST AND 0.610 M., 2.0 FEET NORTH-NORTHEAST FROM TWO
OK0006'CARSONITE WITNESS POSTS.
OK0006'
OK0006'TO VISIT THIS STATION YOU WILL NEED TO CHECK WITH
OK0006'AIRPORT SECURITY FOR ESCORT ACROSS AIRPORT. PHONE
OK0006'(517) 695-5558, FIRE DEPARTMENT AND SECURITY OFFICE.
OK0006'
OK0006'RECOVERED AS DESCRIBED.
OK0006
OK0006 STATION RECOVERY (1989)
OK0006
OK0006'RECOVERY NOTE BY NATIONAL GEODETIC SURVEY 1989
OK0006'THE STATION IS LOCATED ABOUT 14.5 KM (9.00 MI) NORTHWEST OF SAGINAW,
OK0006'2.4 KM (1.50 MI) EAST OF FREELAND AND ON THE GROUNDS OF THE TRI-CITY
OK0006'AIRPORT. CALL AHEAD FOR SECURITY ESCORT, PHONE (517)695-5558.
OK0006'TO REACH THE STATION FROM THE JUNCTION OF COUNTY ROUTE 47 AND
OK0006'WASHINGTON ROAD IN THE TOWN OF FREELAND, GO EAST ON WASHINGTON ROAD,
OK0006'WHICH BECOMES FREELAND ROAD, FOR 2.2 KM (1.35 MI) TO A Y-FORK. TURN
OK0006'LEFT AND GO NORTH ON GARFIELD ROAD FOR 1.05 KM (0.65 MI) TO THE MAIN
OK0006'ENTRANCE ROAD TO TRI-CITY AIRPORT. TURN RIGHT AND GO SOUTHEASTERLY
OK0006'FOR 0.55 KM (0.35 MI) TO A STOP SIGN. CONTINUE STRAIGHT AHEAD TO THE
OK0006'GENERAL AVIATION TERMINAL, FAA AND AIRPORT ADMINISTRATION BUILDING
FOR
OK0006'0.25 KM (0.15 MI) TO A SECURED GATE AT THE NORTH END OF THE BUILDING.
OK0006'PUSH BUZZER TO CALL SECURITY AND OPEN GATE. PASS THROUGH THE GATE
AND
OK0006'PROCEED ACROSS TAXIWAY ONTO SERVICE ROAD LEADING SOUTHWEST, SOUTH AND
OK0006'SOUTHEAST FOR 1.55 KM (0.95 MI) TO A CROSSROAD, OLD EXTENTION OF
OK0006'GARFIELD ROAD AND THE STATION ON THE RIGHT.
OK0006'THE STATION IS A STANDARD CGS DISK SET IN THE TOP OF A 42 CM SQUARE
OK0006'CONCRETE MONUMENT RECESSED 18 CM BELOW THE GROUND. LOCATED 10.67 M
OK0006'(35.0 FT) NORTH-NORTHEAST OF THE NORTH END OF HEADWALL OF A BOX
OK0006'CULVERT UNDER THE NORTH-SOUTH ROAD, 9.15 M (30.0 FT) EAST OF THE
OK0006'CENTER OF THE PAVED ROAD, 6.1 M (20.0 FT) SOUTH OF THE EAST END OF A
OK0006'CONCRETE CULVERT UNDER THE ROAD, 2.9 M (9.5 FT) NORTH OF A UTILITY
OK0006'POLE, 0.6 M (2.0 FT) SOUTH OF A CARSONITE WITNESS POST AND 0.6 M
OK0006'(2.0 FT) NORTH OF A CARSONITE WITNESS POST.
Reach D Survey Report Page A-7
OK0006'DESCRIBED BY R.L. RAMSEY, TYPED BY HJS.
OK0006
OK0006 STATION RECOVERY (1990)
OK0006
OK0006'RECOVERY NOTE BY NATIONAL GEODETIC SURVEY 1990
OK0006'RECOVERED IN GOOD CONDITION.
OK0006
OK0006 STATION RECOVERY (1991)
OK0006
OK0006'RECOVERY NOTE BY LOCAL ENGINEER (INDIVIDUAL OR FIRM) 1991 (NCC)
OK0006'RECOVERED AS DESCRIBED.
OK0006
OK0006 STATION RECOVERY (1991)
OK0006
OK0006'RECOVERY NOTE BY LOCAL ENGINEER (INDIVIDUAL OR FIRM) 1991 (NCC)
OK0006'FOUND IN GOOD CONDITION AS DESCRIBED.
OK0006
OK0006 STATION RECOVERY (1991)
OK0006
OK0006'RECOVERY NOTE BY NATIONAL GEODETIC SURVEY 1991
OK0006'THE STATION IS LOCATED ABOUT 14.5 KM (9.0 MI) NORTHWEST OF SAGINAW,
OK0006'2.4 KM (1.5 MI) EAST OF FREELAND AND ON THE GROUNDS OF THE TRI-CITY
OK0006'AIRPORT. CALL AHEAD FOR SECURITY ESCORT, PHONE (517)695-5558.
OK0006'TO REACH THE STATION FROM THE JUNCTION OF COUNTY ROUTE 47 AND
OK0006'WASHINGTON ROAD IN THE TOWN OF FREELAND, GO EAST ON WASHINGTON ROAD,
OK0006'WHICH BECOMES FREELAND ROAD, FOR 2.2 KM (1.4 MI) TO A Y-FORK. TURN
OK0006'LEFT AND GO NORTH ON GARFIELD ROAD FOR 1.05 KM (0.65 MI) TO THE MAIN
OK0006'ENTRANCE ROAD TO TRI-CITY AIRPORT. TURN RIGHT AND GO SOUTHEASTERLY
OK0006'FOR 0.55 KM (0.34 MI) TO A STOP SIGN. CONTINUE STRAIGHT AHEAD TO THE
OK0006'GENERAL AVIATION TERMINAL, FAA AND AIRPORT ADMINISTRATION BUILDING
OK0006'FOR 0.25 KM (0.16 MI) TO A SECURED GATE AT THE NORTH END OF THE
OK0006'BUILDING. PUSH BUZZER TO CALL SECURITY AND OPEN GATE. PASS THROUGH
OK0006'THE GATE AND PROCEED ACROSS TAXIWAY ONTO SERVICE ROAD LEADING
OK0006'SOUTHWEST, SOUTH AND SOUTHEAST FOR 1.55 KM (0.96 MI) TO A CROSSROAD,
OK0006'OLD EXTENTION OF GARFIELD ROAD AND THE STATION ON THE RIGHT.
OK0006'MONUMENT IS RECESSED 18 CM BELOW THE GROUND. LOCATED 10.67 M
OK0006'(35.01 FT) NORTH-NORTHEAST OF THE NORTH END OF HEADWALL OF A BOX
OK0006'CULVERT UNDER THE NORTH-SOUTH ROAD, 9.15 M (30.02 FT) EAST OF THE
OK0006'CENTER OF THE PAVED ROAD, 6.1 M (20.0 FT) SOUTH OF THE EAST END OF A
OK0006'CONCRETE CULVERT UNDER THE ROAD, 2.9 M (9.5 FT) NORTH OF A UTILITY
OK0006'POLE, 0.6 M (2.0 FT) SOUTH OF A CARSONITE WITNESS POST AND 0.6 M
OK0006'(2.0 FT) NORTH OF A CARSONITE WITNESS POST.
OK0006
OK0006 STATION RECOVERY (1993)
OK0006
OK0006'RECOVERY NOTE BY NATIONAL GEODETIC SURVEY 1993 (CLS)
OK0006'THE STATION IS LOCATED ABOUT 14.5 KM (9.01 MI) NORTHWEST OF SAGINAW,
OK0006'2.4 KM (1.49 MI) EAST OF FREELAND, AND ON THE GROUNDS OF THE TRI-CITY
OK0006'AIRPORT. CALL AHEAD FOR SECURITY ESCORT, PHONE (517) 695-5558.
OK0006'
OK0006'TO REACH FROM THE JUNCTION OF STATE ROUTE 47 AND WASHINGTON ROAD IN
OK0006'FREELAND, GO EAST ON WASHINGTON ROAD, WHICH BECOMES FREELAND ROAD,
FOR
OK0006'2.2 KM (1.37 MI) TO A Y-FORK. TURN LEFT, NORTH, ON GARFIELD ROAD FOR
Reach D Survey Report Page A-8
OK0006'1.05 KM (0.65 MI) TO THE MAIN ENTRANCE ROAD TO THE TRI-CITY AIRPORT.
OK0006'TURN RIGHT, SOUTHEASTERLY FOR 0.55 KM (0.34 MI) TO A STOP SIGN.
OK0006'CONTINUE AHEAD TO THE GENERAL AVIATION TERMINAL, FAA AND AIRPORT
OK0006'ADMINISTRATION BUILDING FOR 0.25 KM (0.16 MI) TO A SECURED GATE AT
THE
OK0006'NORTH END OF THE BUILDING. PUSH BUZZER TO CALL SECURITY AND OPEN
OK0006'GATE. PASS THROUGH THE GATE AND PROCEED ACROSS TAXIWAY ONTO SERVICE
OK0006'ROAD LEADING SOUTHWEST, SOUTH, AND SOUTHEAST FOR 1.55 KM (0.96 MI) TO
OK0006'A CROSSROAD, OLD EXTENSION OF GARFIELD ROAD AND THE STATION ON THE
OK0006'RIGHT.
OK0006'
OK0006'STATION MARK IS A TRIANGULATION STATION DISK SET IN THE TOP OF A
OK0006'SQUARE CONCRETE POST RECESSED 15 CM BELOW THE SURFACE. IT IS 10.7 M
OK0006'(35.10 FT) NORTH-NORTHEAST OF THE NORTH END OF HEADWALL OF A BOX
OK0006'CULVERT UNDER THE NORTH-SOUTH ROAD, 9.15 M (30.02 FT) EAST OF THE
OK0006'CENTER OF THE PAVEC ROAD, 6.1 M (20.01 FT) SOUTH OF THE EAST END OF A
OK0006'CONCRETE CULVERT UNDER THE ROAD, 2.9 M (9.51 FT) NORTH OF A UTILITY
OK0006'POLE, 0.6 M (1.97 FT) SOUTH OF A FIBERGLASS WITNESS POST, AND 0.76 M
OK0006'(2.49 FT) NORTH OF A FIBERGLASS WITNESS POST.
OK0006
OK0006 STATION RECOVERY (1994)
OK0006
OK0006'RECOVERY NOTE BY NATIONAL GEODETIC SURVEY 1994 (CFS)
OK0006'NOTE--ESCORT REQUIRED TO REACH STATION.
OK0006'
OK0006'STATION IS LOCATED ABOUT 16 KM (9.95 MI) NORTHWEST OF SAGINAW, AT THE
OK0006'SOUTHWEST END OF THE TRI-CITY INTERNATIONAL AIRPORT, ABOUT 300 M
OK0006'(984.2 FT) NORTHWEST OF THE JET FUEL FARM, 150 M (492.1 FT) NORTHEAST
OK0006'OF THE PERIMETER FENCE, AT AN OLD ROAD JUNCTION, NEAR THE NORTHEAST
OK0006'CORNER OF SECTION 23, T 13 N, R 3 E. OWNERSHIP--TRI-CITY AIRPORT,
OK0006'8500 GARFIELD ROAD, BOX P, FREELAND, MI 48623. AIRPORT MANAGER IS
OK0006'ELIZABETH OWEN, PHONE 517-695-5555.
OK0006'
OK0006'TO REACH FROM THE OVERPASS AT THE JUNCTION OF US HIGHWAY 10 AND
OK0006'GARFIELD ROAD (2 KM SOUTHWEST OF AUBURN), GO SOUTH ON GARFIELD ROAD
OK0006'FOR 7.47 KM (4.65 MI) TO THE AIRPORT ENTRANCE ROAD ON THE LEFT. TURN
OK0006'LEFT, EAST, ON ROAD FOR 0.43 KM (0.25 MI) TO A ROAD RIGHT. TURN
OK0006'RIGHT, SOUTHEAST, ON ROAD FOR 0.23 KM (0.15 MI) TO THE EXECUTIVE
OK0006'TERMINAL BUILDING AND THE ADMINISTRATIVE OFFICE AND SECURITY OFFICE.
OK0006'
OK0006'STATION MARK IS A DISK SET IN THE TOP OF A 30-CM ROUND CONCRETE POST
OK0006'15 CM RECESSED BELOW GROUND IN OPEN HOLE. IT IS 8.9 M (29.2 FT) EAST
OK0006'OF A ROAD CENTER, 2.7 M (8.9 FT) NORTH OF A UTILITY POLE, 10.7 M
(35.1
OK0006'FT) NORTH-NORTHEAST OF THE NORTH END OF A CONCRETE CULVERT HEADWALL,
OK0006'5.9 M (19.4 FT) SOUTH-SOUTHEAST OF THE TOP CENTER OF A CONCRETE PIPE
OK0006'CULVERT, 0.7 M (2.3 FT) SOUTH OF A FIBERGLASS WITNESS POST, 0.8 M
(2.6
OK0006'FT) NORTH OF A FIBERGLASS WITNESS POST, AND 23.8 M (78.1 FT)
OK0006'SOUTH-SOUTHEAST OF THE CENTER OF THE ROAD JUNCTION.
OK0006'
OK0006'DESCRIBED BY G.R. HEID.
OK0006
OK0006 STATION RECOVERY (1996)
Reach D Survey Report Page A-9
OK0006
OK0006'RECOVERY NOTE BY MICHIGAN DEPARTMENT OF TRANSPORTATION 1996 (JAS)
OK0006'RECOVERED AS DESCRIBED.
OK0006
OK0006 STATION RECOVERY (2001)
OK0006
OK0006'RECOVERY NOTE BY MICHIGAN DEPARTMENT OF TRANSPORTATION 2001 (BHS)
OK0006'STATION WAS RECOVERED ON 04-03-2001 BY MICHIGAN DEPARTMENT OF
OK0006'TRANSPORTATION, BAY REGION, (BHS) IN GOOD CONDITION. STATION IS
OK0006'USUABLE FOR G.P.S. THERE HAS BEEN A REQUEST FROM THE AIRPORT
OK0006'MANAGER THAT THIS STATION BE RELOCATED, DUE TO THE FREQUENT USE,
OK0006'AND THE FACT THAT AND AIRPORT EXCORT HAS TO TAKE PERSONNAL
OK0006'USING THIS STATION OUT TO THE SITE, AS YOU ARE NEAR THE RUNWAYS OF
OK0006'THE AIRPORT.
OK0006'
OK0006'TYPED BY RONALD L. RAMSEY, NGS GEODETIC ADVISOR - MICHIGAN.
OK0006'
OK0006
OK0006 STATION RECOVERY (2001)
OK0006
OK0006'RECOVERY NOTE BY NATIONAL GEODETIC SURVEY 2001 (DB)
OK0006'THIS REPORT WAS SUBMITTED BY THE US POWER SQUADRONS.
OK0006
OK0006 STATION RECOVERY (2004)
OK0006
OK0006'RECOVERY NOTE BY INDIVIDUAL CONTRIBUTORS 2004
OK0006'RECOVERED IN GOOD CONDITION.
OK0006
OK0006 STATION RECOVERY (2004)
OK0006
OK0006'RECOVERY NOTE BY WADE-TRIM INCORPORATED 2004 (DJR)
OK0006'DESCRIPTION IS ADEQUATE
*** retrieval complete.
Elapsed Time = 00:00:00
Reach D Survey Report Page A-10
Overlook Park Opus Point Report
FILE: 00010951.07o 000109691
9999 OPUS DISCLAIMER OPUS DISCLAIMER OPUS DISCLAIMER OPUS DISCLAIMER
9999
9999 Your data file spans less than 2 hours. OPUS guidelines require a
9999 minimum data span of 2 hours and strongly recommend 4 hours to achieve
9999 best accuracies. However, due to popular demand by users, OPUS will
9999 accept data spans less than 2 hours, but does not provide any
guarantee
9999 to the accuracies or results. The results may be seriously degraded.
9999 OPUS software to deliver best accuracy results for short data spans is
9999 under development.
9999 With triming the first few epochs, some files that start out with
9999 2 hours and a few minutes of data may be reduced to just under 2
9999 hours, and this warning may be ignored
9999
9999 OPUS DISCLAIMER OPUS DISCLAIMER OPUS DISCLAIMER OPUS DISCLAIMER
9999
2005 NOTE: The IGS precise and IGS rapid orbits were not available
2005 at processing time. The IGS ultra-rapid orbit was/will be used to
2005 process the data.
2005
NGS OPUS SOLUTION REPORT
========================
USER: david.humes@tteci.com DATE: April 06, 2007
RINEX FILE: 0001095t.07o TIME: 01:31:37 UTC
SOFTWARE: page5 0612.06 master12.pl START: 2007/04/05 19:13:00
EPHEMERIS: igu14214.eph [ultra-rapid] STOP: 2007/04/05 21:01:00
NAV FILE: brdc0950.07n OBS USED: 3586 / 3685 :
97%
ANT NAME: LEIAX1202 NONE # FIXED AMB: 29 / 29 :
100%
ARP HEIGHT: 1.382 OVERALL RMS: 0.010(m)
REF FRAME: NAD_83(CORS96)(EPOCH:2002.0000) ITRF00
(EPOCH:2007.2598)
X: 463922.460(m) 0.011(m) 463921.740(m) 0.011(m)
Y: -4603806.959(m) 0.052(m) -4603805.596(m) 0.052(m)
Z: 4375318.901(m) 0.055(m) 4375318.826(m) 0.055(m)
LAT: 43 35 23.90849 0.005(m) 43 35 23.93864 0.005(m)
E LON: 275 45 15.23419 0.006(m) 275 45 15.20835 0.006(m)
W LON: 84 14 44.76581 0.006(m) 84 14 44.79165 0.006(m)
EL HGT: 161.500(m) 0.076(m) 160.413(m) 0.076(m)
ORTHO HGT: 195.663(m) 0.080(m) [Geoid03 NAVD88]
Reach D Survey Report Page A-11
UTM COORDINATES STATE PLANE COORDINATES
UTM (Zone 16) SPC (2113 MI S)
Northing (Y) [meters] 4830019.923 232164.713
Easting (X) [meters] 722337.435 4009763.155
Convergence [degrees] 1.89979870 0.08227489
Point Scale 1.00020809 0.99998259
Combined Factor 1.00018276 0.99995727
US NATIONAL GRID DESIGNATOR: 16TGP2233730020(NAD 83)
BASE STATIONS USED
PID DESIGNATION LATITUDE LONGITUDE
DISTANCE(m)
DG5936 HMLK HEMLOCK CORS ARP N432441.083 W0841414.486 19850.9
AJ5551 BAYR SAGINAW CORS ARP N432646.398 W0835330.210 32780.2
AF9510 SAG1 SAGINAW 1 CORS ARP N433743.089 W0835015.940 33218.3
NEAREST NGS PUBLISHED CONTROL POINT
OK0013 RV 112 N433608. W0841341. 1974.3
This position and the above vector components were computed without any
knowledge by the National Geodetic Survey regarding the equipment or
field operating procedures used.
Reach D Survey Report Page A-12
Appendix B. Tittabawassee River Reach D Bathymetry: April 2007
(Sheet 1 of 1)
Reach D Survey Report
Reach D Survey Report Page B-1
Appendix C. Equipment Data Sheets
The following are copies of the equipment data sheets provided by the manufacturers of some of
the systems used in the survey.
Reach D Survey Report
Reach D Survey Report Page C-1
Reach D Survey Report Page C-2
Reach D Survey Report Page C-3
Reach D Survey Report Page C-4
Reach D Survey Report Page C-5
Reach D Survey Report Page C-6
Reach D Survey Report Page C-7
Reach D Survey Report Page C-8
Das könnte Ihnen auch gefallen
- Via Electronic Mail OnlyDokument2 SeitenVia Electronic Mail OnlyCREWNoch keine Bewertungen
- 2017-01-06 Documents Produced 2Dokument36 Seiten2017-01-06 Documents Produced 2CREWNoch keine Bewertungen
- 2017-01-06 Documents Produced 1Dokument365 Seiten2017-01-06 Documents Produced 1CREWNoch keine Bewertungen
- 2016-12-21 FOIA Request (Documents To Congress)Dokument3 Seiten2016-12-21 FOIA Request (Documents To Congress)CREWNoch keine Bewertungen
- Final Response Letter 10-17-2016Dokument2 SeitenFinal Response Letter 10-17-2016CREWNoch keine Bewertungen
- Memorandum in Opposition To Plaintiffs' Motion For Temporary Injunction and Declaration of Amy Frederick With ExhibitsDokument19 SeitenMemorandum in Opposition To Plaintiffs' Motion For Temporary Injunction and Declaration of Amy Frederick With ExhibitsCREWNoch keine Bewertungen
- CREW: Memorandum in Opposition To Plaintiffs' Motion For Temporary Injunction and Declaration of Amy Frederick With ExhibitsDokument19 SeitenCREW: Memorandum in Opposition To Plaintiffs' Motion For Temporary Injunction and Declaration of Amy Frederick With ExhibitsCREWNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Links of XII Physics Investigatory Project Allowtment 2Dokument3 SeitenLinks of XII Physics Investigatory Project Allowtment 2yashtomarsoop07Noch keine Bewertungen
- Classical Electromagnetism 1st Edition Franklin Solutions ManualDokument21 SeitenClassical Electromagnetism 1st Edition Franklin Solutions ManualBrianYorktnqsw100% (15)
- Land SurveyingDokument174 SeitenLand SurveyingArifulmakrif Hailee100% (2)
- Present Simple Present ContinuousDokument3 SeitenPresent Simple Present ContinuousFernando SabinoNoch keine Bewertungen
- SOM-based Generating of Association RulesDokument5 SeitenSOM-based Generating of Association RulesKishor PeddiNoch keine Bewertungen
- Daftar Isian 3 Number Plate, Danger Plate, Anti Climbing DeviceDokument2 SeitenDaftar Isian 3 Number Plate, Danger Plate, Anti Climbing DeviceMochammad Fauzian RafsyanzaniNoch keine Bewertungen
- Zoom and Re-Zoom Team ActivityDokument2 SeitenZoom and Re-Zoom Team ActivityWalshie28050% (1)
- A 2Dokument3 SeitenA 2John Kevin NocheNoch keine Bewertungen
- DAC AnalysisDokument19 SeitenDAC Analysisమురళీధర్ ఆది ఆంధ్రుడుNoch keine Bewertungen
- Solutions Tutorial 6Dokument9 SeitenSolutions Tutorial 6Nur Aqilah Abdullah HashimNoch keine Bewertungen
- IN804 UV-VIS Nomenclature and UnitsDokument5 SeitenIN804 UV-VIS Nomenclature and UnitsAnurak OnnnoomNoch keine Bewertungen
- ( (2004) Yamamuro & Wood) - Effect of Depositional Method On The Undrained Behavior and Microstructure of Sand With SiltDokument10 Seiten( (2004) Yamamuro & Wood) - Effect of Depositional Method On The Undrained Behavior and Microstructure of Sand With SiltLAM TRAN DONG KIEMNoch keine Bewertungen
- SAP EHSM - Risk Assessment - User Guide - Help FilesDokument15 SeitenSAP EHSM - Risk Assessment - User Guide - Help FilesKishor Kolhe50% (2)
- Technical Data Sheet: BS-510 All Pressure Solvent CementDokument1 SeiteTechnical Data Sheet: BS-510 All Pressure Solvent CementBuwanah SelvaarajNoch keine Bewertungen
- Exercicios de PhonicsDokument51 SeitenExercicios de Phonicsms. TeixeiraNoch keine Bewertungen
- Microsoft PowerPoint - Sesi 2-Communication Skills - PPT (Comp PDFDokument21 SeitenMicrosoft PowerPoint - Sesi 2-Communication Skills - PPT (Comp PDFSarah Eddiah0% (1)
- 747Dokument12 Seiten747GurdevBaines100% (3)
- Assignment 9 Nomor 1Dokument2 SeitenAssignment 9 Nomor 1Alexander Steven ThemasNoch keine Bewertungen
- Yuasa Technical Data Sheet: The World's Leading Battery ManufacturerDokument1 SeiteYuasa Technical Data Sheet: The World's Leading Battery ManufacturerAshraf Sayed ShabaanNoch keine Bewertungen
- D6588Dokument6 SeitenD6588Pulak DebnathNoch keine Bewertungen
- Spring 2010 MidTerm OPKST CS101 Bc100200572Dokument6 SeitenSpring 2010 MidTerm OPKST CS101 Bc100200572cs619finalproject.comNoch keine Bewertungen
- The Child and Adolescent Learners and Learning PrinciplesDokument8 SeitenThe Child and Adolescent Learners and Learning PrinciplesAragon KhailNoch keine Bewertungen
- Saudi Arabia Companies Contact DetailsDokument64 SeitenSaudi Arabia Companies Contact DetailsYAGHMOURE ABDALRAHMAN86% (69)
- IG Client Sentiment Report 2020-12-03 12 - 00 PDFDokument36 SeitenIG Client Sentiment Report 2020-12-03 12 - 00 PDFEno Ronaldfrank OguriNoch keine Bewertungen
- English 4 Q.2 Module 2Dokument6 SeitenEnglish 4 Q.2 Module 2RjVValdezNoch keine Bewertungen
- Missouri Department of Transportation: Standard Inspection and Testing Plan (ITP)Dokument32 SeitenMissouri Department of Transportation: Standard Inspection and Testing Plan (ITP)mohamedamine.zemouriNoch keine Bewertungen
- Spectral Analysis of The ECG SignalDokument2 SeitenSpectral Analysis of The ECG SignalCamilo BenitezNoch keine Bewertungen
- Vocabulary Levels Tests Versions 1 2Dokument12 SeitenVocabulary Levels Tests Versions 1 2Rangsiya PjewNoch keine Bewertungen
- Filled System Temperature Recorders & Recorder Controllers: SpecificationDokument2 SeitenFilled System Temperature Recorders & Recorder Controllers: SpecificationdencryNoch keine Bewertungen
- MP65557-1 Manual Técnico - 4900Dokument371 SeitenMP65557-1 Manual Técnico - 4900Tecnico IncoderNoch keine Bewertungen